
Fターム[5F031JA51]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出した信号の処理 (521)
Fターム[5F031JA51]に分類される特許
1 - 20 / 521
長尺体の支持装置および支持方法
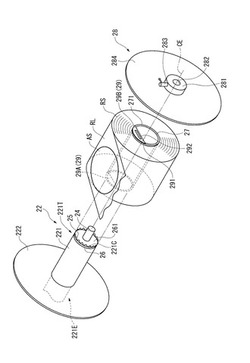
【課題】長尺体が巻回されかつデータキャリアが設けられた軸芯部材を支持軸で支持する際に、軸芯部材の装着方向によらず、データキャリアに対するデータの通信を適切に行なうことができる長尺体の支持装置および支持方法を提供する。
【解決手段】基端部221Eと先端部221Tとを有し、軸芯部材27における中空部の一端側を先端部221T側から挿入することで当該軸芯部材27を支持する支持軸221と、支持軸221を基端部221E側から支えるフレームと、ループアンテナ26とを備え、中空部の両端面271には、ループアンテナ26を介して、所定のデータの記憶および送信の少なくとも一方が可能なデータキャリア29が設けられ、支持軸221の先端部には、中空部の一端側に設けられたデータキャリア29Aを破断する破断手段25が設けられている。
(もっと読む)
基板割れ検出方法および当該基板割れ検出方法に基づくイオンビーム照射装置の運転方法

【課題】イオンビーム照射装置において、安価かつ簡単な構成で、広範囲に渡って基板割れの検出を行う。
【解決手段】基板8の裏面と対向する面に1つ以上の開口部を有する基板支持部材9と、基板8を搭載した基板支持部材9を駆動させて、イオンビーム3の少なくとも一部が基板8上に照射される照射領域とイオンビーム3が基板8上に照射されない非照射領域に基板8を搬送する基板駆動機構と、基板8の下流側でイオンビーム3が照射される位置に配置されたビーム電流計測器11を備えたイオンビーム照射装置1で、照射領域内に基板8が搬送されているときに、ビーム電流計測器11によって計測されたビーム電流の計測値に基づいて、基板割れの有無を検出する。
(もっと読む)
長尺体の支持装置および支持方法
【課題】長尺体が巻回されかつデータキャリアが設けられた軸芯部材を支持軸で支持する際に、データキャリアに対するデータの通信を適切に行うための正確な位置合わせが不要な長尺体の支持装置および支持方法を提供する。
【解決手段】基端部221Eと先端部221Tとを有し、軸芯部材23の一端側から挿入することで当該軸芯部材23を支持する支持軸221と、支持軸221を基端部221E側から支えるフレームと、支持軸221の先端部221Cに固定することにより軸芯部材23の位置決めが可能なガイド手段26とを備え、軸芯部材23には、中空部の他端側であって、軸芯部材23の軸線CFに直交する面内に所定のデータの記憶および送信の少なくとも一方が可能なデータキャリア29が設けられ、支持軸221の軸線CEに直交する外ガイド板264には、支持軸221の軸線CEを囲むループ状に巻かれたループアンテナ27が設けられている。
(もっと読む)
駆動システム及び駆動方法、並びに露光装置及び露光方法
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
基板搬送システム
【課題】搬送アームのベース上方に設けた撮像装置だけで,搬送アームのピック上の基板を検出する。
【解決手段】搬送アーム210と共に旋回自在に支持され,ピック側に配置されるピック側ミラー310を備えたピック側ユニット304とベース側に配置されるベース側ミラー312を備えたベース側ユニット306とを少なくとも有し,ピック側ミラーはピックに保持されたウエハWの周縁を含む画像をベース側に向けて反射するように配置し,ベース側ミラーはピック側ミラーからの画像をベースの上側に向けて反射するように配置したミラーユニットと,ベース側ミラーからの画像が撮像領域に含まれるようにベースの上方に設けられた撮像装置130とを設け,撮像装置で取り込んだ当該画像に基づいて基板状態を検出する。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】回折格子を用いて計測を行う際に、相対位置を予め定められた相対位置からの絶対位置として容易に計測する。
【解決手段】エンコーダ10Xは、第1部材6に設けられ、格子パターン12Xa及び基準パターン13XAが形成された回折格子12Xと、計測光MX1,MX2を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1,MX2を格子パターン面12Xbにθy方向(X方向)に対称な角度で傾斜させて入射させる傾斜ミラー32X,34Xと、計測光MX1,MX2の回折格子12Xによる回折光DX2,EX2を受光する光電センサ40XA,40XBと、を有する。
(もっと読む)
支持装置及び支持方法、並びに、シート剥離装置及び剥離方法、更に、シート貼付装置及び貼付方法
【課題】外縁部に切欠部を有する板状部材を吸引して支持し、その減圧状態から切欠部の位置を認識することのできる支持装置及び支持方法、切欠部を基準として板状部材に貼付された接着シートを剥離するシート剥離装置及び剥離方法、切欠部を基準として板状部材に接着シートを貼付するシート貼付装置及び貼付方法、を提供する。
【解決手段】板状部材WFを支持する支持面14を備えたテーブル16と、支持面14に設けられて板状部材WFの外縁部を吸引する吸引手段17を含む吸引手段19と、吸引手段17の減圧状態を検出する検出手段22とを含んで支持装置11が構成されている。この支持装置11の上方に剥離用テープPTを板状部材WFに貼付された接着シートASに貼付するシート保持手段12を設けてシート剥離装置が構成されている。シート保持手段12は、板状部材WFに設けられた切欠部20、21を基準として、剥離開始位置を決定し、当該剥離開始位置から接着シートを剥離するようになっている。
(もっと読む)
アーム型搬送装置
【課題】アーム型搬送装置とは別の場所に設置したアライナー等に逐一搬送対象物を搬送することなく、搬送対象物の中心位置を検出可能なアーム型搬送装置を提供する。
【解決手段】正円形搬送対象物Wを保持する第一のリンク21を回転軸C1を介して水平面内で回動可能となるようにベース部材たる第二のリンク22に取り付けたアーム機構2と、前記第二のリンク22に前記回転軸C1とともに取り付けられ、取り付け位置に応じて定まる検出位置Seに正円形搬送対象物Wのエッジが位置したことを検出するエッジ検出部3と、前記第二のリンク22に対する前記第一のリンク21の回転角度θを検出する回転角度検出部27と、正円形搬送対象物Wのエッジがエッジ検出部3を通過した際に回転角度検出部27で検出された対応する回転角度θに基づいて前記リンク21に対する正円形搬送対象物Wの中心位置を算出する中心位置算出部41とを具備して構成した。
(もっと読む)
真空吸着保持装置およびその方法
【課題】本発明は、材料や工程の追加を抑制しつつ、被吸着物をチャックステージに適切に真空吸着させることができる真空吸着保持装置および真空吸着保持方法の提供を目的とする。
【解決手段】本発明にかかる真空吸着保持装置は、被吸着物2を真空吸着により吸着面に吸着して保持させる、チャックステージ3と、被吸着物2に関する所定の情報を付与されることにより、所定の情報に応じて、チャックステージ3に吸着させるための真空度を自動的に制御する制御部15とを備える。
(もっと読む)
ダイボンダ及びボンディング方法
【課題】
本発明は、ダイが割れなかった場合、撓みの発生を判別できる信頼性の高いダイボンダを提供することである。
【解決手段】
本発明は、コレットでダイを吸着する吸着し、ダイが粘着されたダイシングテープを突き上げ、前記コレットで吸着され前記突き上げられた前記ダイを前記ダイシングテープから剥離して基板に装着し、剥離された前記ダイを基板にボンディングするダイボンダ又はボンディング方法において、前記突き上げ時の前記コレットと前記ダイとの隙間によるエアリーク流量の減少が正常の剥離と比べて所定量小さいことでダイの撓みを判別する。
(もっと読む)
動画像生成装置、動画像生成方法及び動画像生成システム
【課題】基板処理装置を構成する搬送機構が有する基板支持具の設計動作及び検出動作をシミュレートした動画像を生成することにより、基板支持具の異常動作に関する原因判定材料を提供可能な動画像生成装置、動画像生成方法及び動画像生成システムを提供する。
【解決手段】動作データ生成部21bは、受け付けた基板支持具に関する動作の履歴情報2Dに基づいて、基板支持具の検出動作データ4Dを生成する。抽出部21aは、基板処理装置に係るCADデータ1Dから基板支持具の形状データ5Dと設計動作データ6Dとを抽出する。動画像生成装置は、抽出した基板支持具の形状データ5D及び設計動作データ6D並びに生成した基板支持具の検出動作データ4Dに基づいて、基板支持具の設計動作と検出動作とをシミュレートした動画像を生成する動画像生成部21eを備えている。
(もっと読む)
露光方法及びデバイス製造方法
【課題】動的移動平均により補正情報を作成する。
【解決手段】エンコーダシステムと干渉計システムとの計測結果の間の誤差の変化の程度に応じて、適当な数ウエハについての誤差情報を用いて移動平均を求める動的移動平均により、エンコーダシステムの計測結果を補正するための補正情報を求める。これにより、誤差(例えばX−X0)の変化が小さい時(例えば区間b)には、多くの誤差情報を用いて移動平均を求めるので、ランダムに発生する誤差を効率良く抑制することが可能となるとともに、誤差が急激に変化するとき(例えば区間c)には、少しの数のウエハについての誤差情報を用いて移動平均を求めるので、移動平均による飛び値に伴う応答の遅れを回避することが可能となる。
(もっと読む)
位置合わせ装置、位置合わせ方法、および、描画装置
【課題】高精度かつ迅速に、基板を適正な回転位置に位置合わせできる技術を提供する。
【解決手段】位置合わせ装置100は、ステージ11を回転させる回転機構121と、ステージ11外からステージ11の位置を測長して、当該測長値に基づいてステージ11の回転角度θを特定する測長部13と、ステージ11に載置された基板Wを適正な回転位置におくために必要なステージの回転角度(目標回転角度θo)を特定する目標回転角度特定部201と、測長部13で計測されたステージ11の回転角度θを目標回転角度θoに近づけることができるような回転機構121の制御パラメータNを出力し、当該制御パラメータNで回転機構121を駆動制御する回転制御部202と、を備える。
(もっと読む)
基板処理装置及び基板処理方法
【課題】
基板の塗布、現像処理を行う基板処理装置において、インターフェイスブロックS3内の雰囲気温度の変動にかかわらず、基板を露光機S4にて要求されている目標温度に設定すること。
【解決手段】
基板を温調プレート53により温調した上でインターフェイスブロックS3から露光機S4に搬送する。そして温調プレート53を通過する温調流体の温度を検出し、設定温度に基づいてチラー5を制御する。更に、インターフェイスブロックS3内の雰囲気の温度あるいは当該雰囲気を搬送された基板の温度を検出し、その温度に基づいて温調流体の設定温度を調整する。あるいは例えば前記雰囲気の温度が目標温度から外れているときに基板の搬送速度を前記雰囲気の温度が目標温度であるときの速度よりも速くなるようにコントロールする。
(もっと読む)
ウェーハマッピング装置およびウェーハマッピング方法
【課題】半導体基板が格納容器から飛び出しているか否かを高速かつ確実に検出することができるウェーハマッピング装置を提供すること。
【解決手段】実施形態のウェーハマッピング装置では、照明光学系が、ウェーハ側面に対して垂直に交わる線状スリット光を、各ウェーハの複数箇所に照射する。第1および第2の撮像部は、前記線状スリット光が照射されているウェーハの側面をそれぞれ第1および第2の撮像画像として撮像する。格納状態検出部は、前記第1および第2の撮像画像が撮像されている場合には、三角測量方法で前記ウェーハの前記格納容器からの飛び出し量を算出し、前記第1および第2の撮像画像の何れか一方のみが撮像されている場合には、前記線状スリット光の反射光が画像面上で結像する結像位置と、基準位置と、を比較することにより、前記ウェーハが前記格納容器から飛び出しているか否かを判定する。
(もっと読む)
ロボットシステム
【課題】ウエハを多段に収納するカセット内のウエハを安全に取り出すこと。
【解決手段】進入可否判定部が、移載対象となるウエハの直下および直上のクリアランスに基づいてハンドが進入可能であるか否かを判定する。そして、進入可否判定部によって進入可能であると判定されたならば、位置補正部は、ハンドの最終的な進入位置を、マッピングされた収納位置に基づいて算出し、算出した進入位置に基づいてロボットを制御するようにロボットシステムを構成する。
(もっと読む)
基板搬送装置
【課題】搬送ロボットのθ軸が回転した時の角度誤差を検出することが可能であり、検出した角度誤差からθ軸の角度補正を行う機能を有する基板搬送装置を提供する。
【解決手段】アーム13を有し基板7を搬送する搬送ロボット2と、基板7を外部に搬送するための開口部8とを備える。搬送ロボット2は、θ軸モータによりアーム13を回転させ、R軸モータ110によりアーム13を伸縮させる。開口部8のフレームに、投光器から受光器へセンサ光を投射する検出センサ4、4’を備える。搬送ロボット2が、アーム13を伸縮して、開口部8を通して基板7を搬送する過程において、基板7が検出センサ4及び検出センサ4’のセンサ光を遮光し始めた時と、検出センサ4及び検出センサ4’がセンサ光の遮光が終了して再び受光し始めた時との、R軸モータ110の回転角度を用いて、θ軸モータの回転角度とアーム13の回転角度との差である角度誤差αを求める。
(もっと読む)
基板冷却装置、基板キュア装置、並びに基板の製造方法
【課題】冷却による基板の損傷を防止可能な基板冷却装置、基板キュア装置、並びに基板の製造方法を提供する。
【解決手段】基板冷却装置において、複数の基板80a〜80fは、下側から上側に向かって、基板80a〜80fの順番で間隔Dを空けて積層されている。突出片65は基板80bと略同一線上の位置にあり、突出片66は基板80dと略同一線上の位置にあり、突出片67は基板80fと同一線上の位置にある。基板80a〜80fは、突出片65〜67によって、A〜Cのエリアに区分されている。冷却室7内には、突出片65〜67と基板80a〜80fとによって、A〜Cのエリアに区分された送風路Sが形成されている。送風路Sにおいて、各エリアに位置する基板80a〜80fは、略整流板である。
(もっと読む)
基板受け渡し装置、基板受け渡し方法及び基板処理装置
【課題】基板搬送機構の保持部材に基板を水平に保持し、昇降部材を介して載置台に基板を受け渡すにあたって、受け渡しに要する時間を短縮できる技術を提供すること。
【解決手段】保持部材23の保持部に水平に保持されたウエハWa(Wb)を昇降ピン37a(37b)を介して載置台3a(3b)に受け渡すにあたって、保持部材23上のウエハWa、Wbの位置を検出し、その検出結果に基づいて保持部材23を移動させると共に、昇降ピン37a(37b)の上昇のタイミングを求め、保持部材23を移動させながら昇降ピン37a(37b)を突き上げてウエハWa(Wb)を受け取るようにしている。そしてウエハWa(Wb)を昇降ピン37a(37b)に受け渡す動作が安定するように減速区間を設定し、それ以外の区間では、従来通り高速で保持部材23を移動させる。
(もっと読む)
ワークの中心位置合わせ装置
【課題】回転動作を停止させることなく回転動作中にワークの中心位置を回転軸の中心に合わせることが可能な位置合わせ装置を提供する。
【解決手段】ワークWを載せる載置台21と、載置台21の下側に配置され且つ載置台21を平面上で直交する2方向に移動させるXYステージ22と、XYステージ22を駆動させるX軸駆動部6,Y軸駆動部7と、XYステージ22を下方から回転可能に支持しXYステージ22の原点に一致する回転軸と、回転軸を回転駆動させる回転軸駆動部8と、ワークWのエッジ位置を検出するエッジ位置検出手段3とを備え、制御部4によって、回転軸を回転駆動させながらエッジ位置情報及び回転角度情報に基づきワークWの中心位置を回転軸の中心に一致させるために要するXYステージ22の移動量を算出し、移動量に基づいてX軸駆動部6又はY軸駆動部7の少なくとも何れか一方を作動させるようにした。
(もっと読む)
1 - 20 / 521
[ Back to top ]