
Fターム[5H004GA04]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 定常特性改善 (87)
Fターム[5H004GA04]に分類される特許
1 - 20 / 87
駆動システム及び駆動方法、並びに露光装置及び露光方法
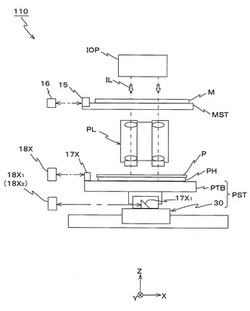
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
プラント制御装置、プラント制御方法およびプログラム

【課題】複数の操作端毎の位置指令信号値の間に差が生じた場合でも、速度型PID演算部からの自動制御を継続しつつ、複数の操作端毎の位置指令信号値間の偏差を自動的に解消する。
【解決手段】速度型PID演算手段と複数の積分演算手段と複数の上書き手段と自動バランス手段とを持つ。前記速度型PID演算手段は、偏差信号からPID演算を行い、偏差に応じた速度型の操作量指令信号を生成する。前記積分演算手段は、前記操作量指令信号に基づいて各操作端用の規定された操作端位置指令信号を生成する。前記複数の上書き手段は、各操作端用の追加の位置指令信号を生成し、対応する積分演算手段に上書き処理を行って操作端位置指令信号を新たに規定する。前記自動バランス手段は、前記規定された操作端位置指令信号間の偏差を算出し、その算出結果に基づいて前記操作量指令信号を補正し、補正された操作量指令信号を前記積分演算手段に与える。
(もっと読む)
モータ制御装置、及びモータ制御方法
【課題】コアを有するモータを制御する際の位置決め精度を向上させるモータ制御装置、及びモータ制御方法を提供する。
【解決手段】コイルが巻回されたコアを有するモータを制御するモータ制御装置は、前記モータの可動子の位置から電気角を算出する電気角算出部と、前記電気角算出部が算出した電気角に応じた制御ゲインを用いて、前記モータの駆動を制御する制御部とを具備する。
(もっと読む)
カルマン・フィルタの処理方法、プログラム及びシステム
【課題】 Unscentedカルマン・フィルタにおいて、プラント特性を考慮した非一様更新タイミングに基づき、推定精度を改善する技法を提供すること。
【解決手段】 カルマン・フィルタへの入力を、分子と分母の多項式の関係が鏡像多項式の関係によって記述される、オールパスフィルタを通すことで非一様更新を実現し、ポリフェーズフィルタによるリサンプリングとは異なった演算量を抑える構成とする。次に、カルマン・フィルタによって得られた推定状態量はそのままでは位相が非一様間隔のものであるため、上記非一様化の逆変換となるフィルタリングを行う。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置
【課題】最短時間制御にフィードバック制御の要素を取り入れると共に、制御終了後に制御出力を収束できるアクチュエータの制御方法及び制御装置を提供する。
【解決手段】最短時間制御を用いると共に、制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出し、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了すると共に、予め設定した時間毎に切替時刻t1と終了時刻t2を繰り返して算出して更新し、更に、制御系が持つ残り仕事と運動エネルギーの和である残留エネルギーの減少と共に、制御出力を小さくする。
(もっと読む)
最適モデル推定装置、方法、及びプログラム
【課題】誤差の分散値を推定せずに、高精度にモデリングを行うことができるようにする。
【解決手段】状態空間モデリング部22によって、観測値の時系列データに基づいて、カルマンフィルタのモデルパラメータを推定する。正規化カルマンフィルタデザイン部22において、状態ベクトルXの推定誤差分散の共分散行列を予測誤差分散で正規化した正規化推定誤差分散共分散行列と、正規化誤差λとを用いた正規化カルマンフィルタが定められる。状態推定部23によって、定められた正規化カルマンフィルタに従って、予測値を時系列に算出すると共に、対応する観測値との予測誤差を各々算出する。最適モデル推定部24によって、予め用意された正規化誤差λの各値を用いたときに状態推定部23によって各々算出された予測誤差に基づいて、最適な正規化誤差λを特定し、最適な正規化誤差λを用いた正規化カルマンフィルタを、最適モデルの推定結果とする。
(もっと読む)
負荷適応型制御ループ切り替え方法及び負荷適応型帰還制御装置
【課題】従来の制御ループの切り替え方法では、制御ループの切り替え時に制御対象回路が不安定になる問題があった。
【解決手段】本発明の制御ループの切り替え方法は、第1の誤差積分値INTG1に第1の誤差値ERR1を加算して第1の誤差積分値INTG1を更新し、第2の誤差積分値INTG2に第2の誤差値ERR1を加算して第2の誤差積分値INTG2を更新し、更新後の第1の誤差積分値INTG1と第2の誤差積分値INTG2とのうち小さな値を示す誤差積分値に基づきPWM信号のデューティ比を決定し、更新後の第1の誤差積分値INTG1とINTG2第2の誤差積分値とのうち小さな値を示す誤差積分値で更新後の第1の誤差積分値INTGと第2の誤差積分値INTG1のうちPWM信号のデューティ比の決定に用いられなかった誤差積分値を更新する。
(もっと読む)
フィードバック制御装置、フィードバック制御方法、モータ及びロボット
【課題】所定動作量(例えば動作速度)以下においても位置決め精度の低下や振動の抑制を図ることを目的とする。
【解決手段】制御対象の動作状態を検出する状態検出器を介して、フィードバック信号を取得するフィードバック信号取得手段と、前記フィードバック信号取得手段で取得したフィードバック信号から誤差成分の周期情報を検出する誤差周期検出手段と、制御指令信号、又は前記フィードバック信号と、前記誤差周期検出手段で検出した周期情報とに基づき、前記誤差成分の周波数を算出する誤差周波数算出手段と、前記誤差周波数算出手段で算出した周波数の信号成分を除去するフィルタを用いて、前記制御対象に出力する制御信号をフィルタリングするフィルタリング手段と、前記制御指令信号の示す動作量又は前記フィードバック信号の示す動作量に基づき、フィルタ形状を算出するフィルタ形状算出手段と、を備える。
(もっと読む)
プロセスの状態予測方法
【課題】要求点ベクトルごとに最適な近傍データベクトルの数が自動的に決定され、予測精度の安定化が図られるプロセスの状態予測方法を提供する。
【解決手段】プロセスの操業状態を示す観測データから構成される入力ベクトル及び出力ベクトルが対となって蓄積されたデータベースを作成し、予測したい時点における出力ベクトルに対応する入力ベクトルからなる要求点ベクトルに類似する近傍データベクトルをデータベースから取得し、近傍データベクトルから局所モデルを構築して、予測したい時点における出力ベクトルを求めるプロセスの状態予測方法において、近傍データベクトルが格納された近傍データセットを近傍データ数を変えて複数作成し、複数の近傍データセットについて主成分分析を実施して各近傍データセットごとに前記要求点ベクトルに対するQ統計量を算出して、Q統計量が最小となる近傍データセットを選択して局所モデルを構築する。
(もっと読む)
制御装置
【課題】外乱成分による制御信号の変動を抑制できるとともに、当該制御信号の変動抑制によるフィードバック制御系の応答特性の変動を抑制できる制御装置が求められる。
【解決手段】制御対象の出力が目標値に近づくように制御信号を変化させるフィードバック制御部を備えた制御装置であって、目標値に対して目標値応答予測部の処理を行って第一演算値を算出し、出力に対してノイズ除去フィルタ処理を行って第二演算値を算出し、目標値に対して目標値応答予測部及びノイズ除去フィルタの処理を行って第三演算値を算出し、第二演算値に第一演算値を加算し第三演算値を減算した制御用出力値を算出する処理と数学的に等価な処理を行い、制御用出力値を制御対象の出力として前記フィードバック制御部に入力する制御装置。
(もっと読む)
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム
【課題】物体初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コスト、かつ高い精度で求めることのできる軌道計画システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、予め複数の区域に分割された状態空間のそれぞれの区域に含まれる枝のノードの数を制限することによって枝を集約した逆方向探索木を作成する探索木作成部101と、該状態空間において、該逆方向探索木上の点に対して、その領域内であれば、該逆方向探索木にしたがって該目標状態に到達しうる、移行可能領域を定める移行可能領域決定部103と、探索木及び移行可能領域を記憶する探索木記憶部104と、該逆方向探索木を使用して該移行可能領域内の点から該根までの、該物体の軌道を定める軌道作成部105と、を備える。
(もっと読む)
位置制御装置の制御パラメータ調整方法及び制御パラメータ調整システム
【課題】複数の駆動系が駆動時に互いに摩擦力を及ぼし合う関係にある位置制御装置の制御パラメータを調整する作業を簡単化する。
【解決手段】位置制御装置28により2つの駆動系のモータ16,24を同時に駆動して各駆動系の位置決めデータを採取し、遺伝的アルゴリズムを用いて各駆動系の位置決めデータの特徴量を評価して、その評価値が要求性能(設計仕様)を満足するように位置制御装置28の制御パラメータを調整する。この際、各駆動系の位置決めデータとして、位置指令波形、実位置波形及びトルク波形を採取し、各駆動系の位置決めデータの特徴量として位置決め波形を評価するようにすると良い。また、調整対象となる制御パラメータは、例えば、位置指令パラメータ、フィードバックゲインパラメータ及びフィードフォワードゲインパラメータである。
(もっと読む)
軌道計画方法、軌道計画システム及び軌道計画・制御システム
【課題】運動コストを最小化するように状態空間を分割し、より精度よく準コスト最小軌道を計画することのできる軌道計画方法を提供する
【解決手段】本発明による軌道計画方法は、軌道計画システム(100)によって物体の状態を目標状態へ制御するための軌道を求める軌道計画方法であって、該物体の状態空間をセルに分割するセル作成部(103)が、所定のセルの数に対して、離散化による近似誤差を最小化するように該状態空間をセルに分割するステップと、探索木作成部(101)が、該状態空間において、該物体の状態遷移に対応する探索木を、該物体の状態に対応する、該探索木の枝のノードがセルに一つずつ含まれるように作成するステップと、軌道作成部(107)が、該探索木を使用して、該物体の現在の状態から目標状態までの経路を定めるステップと、を含む。
(もっと読む)
直進型及び回転型ロボットの制御装置
【課題】高精度な位置決めが要求される工作機械等において、比較的単純な構造を保ちつつ、迅速かつ高精度な位置決めを実現する直進型及び回転型ロボットの制御装置を提供する。
【解決手段】H無限大制御理論に基づく制御系であって、制御器は数式的に以下の3つの部分に分かれる。1)モータの速度が定常誤差なく追従できるように設計された速度制御器。2)速度制御ループを含めたモータに対して設計されたH∞角度制御器。3)ゲイン可変のフィードフォーワード制御器。制御対象の伝達関数に積分要素が含まれた場合における適切な制御が可能となる。
(もっと読む)
干渉力補償制御装置
【課題】可動部間に生じる摩擦力に起因する干渉力を高精度に算出することで、高精度な外乱の推定により、高精度な位置決めを行うことができる干渉力補償制御装置を提供する。
【解決手段】連設されている第一可動部と第二可動部との間において可動部同士の摺動面間に生じる可動部間摩擦力に基づいて干渉力モデルを設定する。第一可動部を駆動する第一アクチュエータに対する第一目標位置指令値110に基づいて第一基準推力指令値を算出する。第二可動部を駆動する第二アクチュエータに対する第二目標位置指令値210と干渉力モデルとに基づいて、可動部間摩擦力の影響により第二可動部の動作に起因して第一可動部の動作に作用する第一干渉力を算出する。そして、第一基準推力指令値と第一干渉力とを加算することにより第一補償推力指令値を算出し、第一補償推力指令値に基づいて第一アクチュエータを制御する。
(もっと読む)
モータ制御回路
【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な制御ゲインを自動的に設定可能なモータ制御回路を提供する。
【解決手段】本発明に係るモータ制御回路10は、速度検出手段FGから入力される検出信号の周期FG_countと外部から入力される基準信号EXCの周期EXC_countとの差に応じた周期誤差信号を出力する周期誤差信号出力手段20と、周期誤差信号に速度ゲインを乗算して得られる速度誤差信号を出力する速度誤差信号出力手段22と、基準信号EXCの周期EXC_countに対する補正基準周期Ref_countの比を補正量とし、その補正量を2乗して速度誤差信号出力手段22が備える所定の速度ゲインKfに乗算することにより、所定の速度ゲインKfを補正するゲイン補正手段28、30とを備えている。
(もっと読む)
障害を弱めるための方法
【課題】障害が識別されるだけではなく、有効信号に対する影響ができる限り小さくなるように障害を弱め且つ最少化し、障害を受けていない有効信号のダイナミクスができるだけ維持されるように拡張する、直接制御量の障害を弱めるための方法を提供する。
【解決手段】操作量が有効信号であるときに、閉制御回路内の直接制御量の障害を弱めるための方法において、直接制御量がそれぞれ相連続する二つの走査時点で連続的に測定され、直接制御量の値が差し引かれ、この差の大きさが予め定められている基準値だけずれている場合に、少なくとも一つの制御パラメータが、障害に対する操作量の反応が最少化されるように変化される。
(もっと読む)
プラントの制御装置
【課題】 プラントを制御する制御量のリミット処理を行うことによる制御性の悪化を最小限に抑制することができるプラントの制御装置を提供する。
【解決手段】 リミット処理の対象となるフィードバック制御量UMとリミット処理後フィードバック制御量UMFとの差分値dLMTの過去値に応じて、フィードバック制御量の修正値DLMが算出され、フィードバック制御量Uを修正値DLMにより修正して、修正フィードバック制御量UMが算出される。修正フィードバック制御量UMのリミット処理が行われ、リミット処理後フィードバック制御量UMFが制御入力としてプラントに入力される。修正値DLMは、プラントの応答特性を示す応答特性パラメータαに応じた値に設定される修正係数KMと、差分値dLMTの過去値とを用いて算出される。
(もっと読む)
オートチューニング装置及びオートチューニング方法
【課題】カスケード接続されたPIDコントローラのPIDパラメータをオートチューニングにより求める。
【解決手段】スレーブ制御量に対して2位置制御を行い測定したリミットサイクル波形からスレーブコントローラ5のPIDパラメータを求め及びスレーブ側制御対象9を一次遅れ+むだ時間モデルで同定し、マスタ制御量に対して2位置制御を行い測定したリミットサイクル波形からマスタ側制御対象10を同定する。さらにスレーブ側をフィードバック制御したときの閉ループ伝達関数を求め、このスレーブ側閉ループ伝達関数を一次遅れ+むだ時間モデルで近似することによりマスタPIDコントローラ4のPID定数を算出する。
(もっと読む)
制御システム
【課題】遺伝的アルゴリズムを利用して最適な制御値を求めることができる制御システムを提供することを課題とする。
【解決手段】制御対象システムを制御するための制御値を出力する制御システムであって、制御対象システムに対する最適な制御値を生成する最適制御装置を有し、最適制御装置は、遺伝的アルゴリズムを実施した回数が設定された実施回数になるまで、遺伝的アルゴリズムを実施する毎に初期個体を発生し、その発生した初期個体を用いて遺伝的アルゴリズムを実施して適応度の高い個体を探索し、遺伝的アルゴリズムを実施した回数が実施回数になった場合、その実施回数分の遺伝的アルゴリズムでそれぞれ探索された個体の中から最も適応度の高い個体を選択し、その選択した個体に基づいて制御対象システムに出力する制御値を生成することを特徴とする。
(もっと読む)
1 - 20 / 87
[ Back to top ]