
Fターム[5H004GA14]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 制御対象の特性変動対策 (107)
Fターム[5H004GA14]の下位に属するFターム
Fターム[5H004GA14]に分類される特許
1 - 20 / 57
安全計装システム

【課題】緊急遮断弁のパーシャルストロークテスト実施に伴うプラントのプロセス値の変動を抑える。
【解決手段】制御部10は、予め記憶されている緊急遮断弁5に係るCV特性データを用いて、現在の遮断弁開度(Xs)に対応するCV値を求め、これより損失CV値を求める。更に、予め記憶されている流量調整弁4に係るCV特性データと流量指示調節計6の出力とに基づいて、調整弁4の現在の弁開度に対応するCV値を求める。そして、この流量調節弁CV値と、上記損失CV値とに基づいて、流量調整弁4の弁開度に係る補正出力を生成し、これに基づいて流量調整弁4の弁開度を増加させる。
(もっと読む)
マルチ反対称最適制御性能構成を使用する流量比制御装置を含むガス送出方法及びシステム

【課題】単一の質量流量を多数の流れラインに分割するための流量比制御装置を含むガス送出システム用のマルチ反対称最適(MAO)制御アルゴリズムを開示する。
【解決手段】MAO制御アルゴリズムでは、各流れラインには、流れセンサ124及びバルブ126が設けられている。このバルブは、ターゲット流量比設定点を得るため、線型サチュレータと組み合わせたSISOフィードバック制御装置によって積極的に制御される。最適制御性能のため、これらのSISO制御装置及び線型サチュレータは実質的に同じである。各バルブ制御コマンドは、全ての他のバルブ制御コマンドに対してマルチ反対称であるということがわかっている。従って、MAO制御アルゴリズムは、任意の時期に少なくとも一つのバルブが許容可能な最大開放位置にあり、これによって、流量比設定点の所与の組について、最大総バルブコンダクタンスに関して最適解を提供することを保証する。
(もっと読む)
プロセス制御システムにおける統合されたアドバンスド制御ブロック
【課題】モデル予測制御のような多入力/多出力制御を実行するアドバンスド制御ブロックを提供する。
【解決手段】アドバンスド制御ブロック56は、汎用制御論理102を有し、プロセス出力および入力に通信可能に接続された制御入力および出力とを有する初期機能制御ブロックを作成することで形成が開始される。制御ブロック内の波形ジェネレータ101は、プロセスモデル104を作成する際に用いられるように設計された励起波形を用いて制御ブロック出力によってプロセス入力の各々を体系的にアップセットする。データ収集ルーチン100は、プロセス入力各々の波形にたいするプロセス出力各々の応答を示すデータを収集する。収集されたデータからプロセスモデルを生成し、プロセスモデルから制御論理パラメータを作成する。制御論理パラメータおよびプロセスモデルは制御ブロックにダウンロードされ、アドバンスド制御ブロックの形成を完了する。
(もっと読む)
電力使用量予測装置および電力使用量予測方法
【課題】ヒータの昇温能力の経時変化を電力使用量の予測に反映する。
【解決手段】電力使用量予測装置は、ヒータの加熱する能力を表すヒータ能力係数HPを記憶するヒータ能力係数記憶部5と、制御対象を単位温度加熱するのに必要な時間を表す昇温時間係数THを記憶する昇温時間係数記憶部6と、ヒータの電力使用量を予測する電力使用量予測部7と、操作量上限値OHを取得する操作量上限値取得部8と、昇温を開始した後に操作量MVが操作量上限値OHに到達している時間帯において制御対象を単位温度加熱するのに必要な時間を表す実績値THxを求める時間実績計測部11と、実績値THxに基づく補正が昇温時間係数THを大きくする補正になると判定した場合のみ、実績値THxを用いて昇温時間係数THを補正する昇温時間係数補正部12とを備える。
(もっと読む)
能動型振動騒音抑制装置
【課題】伝達系の温度が変化することにより実際の伝達関数が変化したとしても、適応制御に用いる伝達関数の推定値と実際の伝達関数とのずれを抑制することにより、高精度に振動や騒音を抑制できる能動型振動騒音抑制装置を提供する。
【解決手段】推定伝達関数記憶部160に、伝達系の温度Tを複数に区分した温度範囲毎に、伝達系の伝達関数の推定値Ghを記憶する。そして、フィルタ係数更新部170は、検出温度Tが含まれる温度範囲における伝達関数の推定値Ghと残留信号eとにより算出される更新値に基づいて、制御信号yの適応フィルタのフィルタ係数a、φを更新する。また、伝達関数同定処理部180は、検出温度Tがそれぞれの温度範囲に含まれる場合にそれぞれの伝達関数Gの同定処理を行い、算出されたそれぞれの伝達関数の推定値Ghを推定伝達関数記憶部160に記憶させる。
(もっと読む)
デジタルサーボアンプシステムおよびそのパラメータ調整方法
【課題】デジタル制御を用いたサーボアンプシステムにおいて、パラメータ調整を迅速に進めるとともにパラメータ調整データを保護する。
【解決手段】デジタルサーボアンプシステムは、ネットワーク経由でパラメータを調整するパラメータ調整装置140を有する。センサ201〜203の信号と目標指令とをデジタル信号に変換し、パラメータ調整装置が調整したパラメータを用いてデジタル制御信号をサーボアンプユニット120が生成する。サーボアンプユニットは、デジタル変換されたセンサ信号と指令信号とを比較演算して制御信号を生成するサーボ制御部222と、演算に使用するパラメータを管理するパラメータ管理装置227とを有する。パラメータ管理装置は、パラメータ調整装置からのパラメータ更新通知に基づいて記憶装置226に更新されたパラメータを書込んでいるときは、サーボ制御部が記憶装置へアクセスすることを禁止する。
(もっと読む)
ニューラルネットワーク学習装置
【課題】入力状態の変化前及び変化後のいずれ状態であっても、出力を精度の高いものにするニューラルネットワーク学習装置を提供すること。
【解決手段】ニューラルネットワーク学習装置1は、第一状態下に関する入力パラメータベクトルuに基づきM個の結合荷重Wi(i=1〜M)の学習を行い、学習完了したニューラルネットワークに新たにN個のニューロンNi(i=a1〜aN)を追加すると共に追加されたN個の結合荷重Wi(i=a1〜aN)の学習を行う。この追加の学習を行う際には、学習完了したM個の結合荷重Wi(i=1〜M)を固定すると共に、少なくとも第一状態と異なる第二状態下に関する入力パラメータベクトルuに基づきN個の結合荷重Wi(i=a1〜aN)の学習を行う。
(もっと読む)
スライディングモード制御における切替線の設計装置及び設計方法
【課題】スライディングモード制御における切替線を自動算出する。
【解決手段】最適応答設計部11は、制御対象40のモデルに対して、所定の操作量飽和時間の間操作量の上限値である第1操作量を入力し、その後安定負荷率に応じた第2操作量を入力する入力波形を入力したときの、制御量の時間応答を計算する。求められた時間応答に基づいて、予め定められた評価関数の値を求める。複数の操作量飽和時間について時間応答と評価関数の値を求め、操作量飽和時間毎の評価関数の値を求める。求められた評価関数の値が、所定の条件を満足する操作量飽和時間をひとつ選択する。最適切替線算出部12は、選択された操作量飽和時間における制御量及びその微分値と、目標値とに基づき、スライディングモード制御の切替線の傾きを求める。スライディングモード制御演算部20は、求められた傾きに従い、スライディングモード制御の切替線のパラメータを求める。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】本発明の目的は、数値解析データと実際のプラント特性との誤差が大きい場合においても、計測データによるモデル修正を短期間で終了できる、又は、データ蓄積による統計モデル構築時間増加を回避できる機能を具備したプラントの制御装置又は火力発電プラントの制御装置を提供することにある。
【解決手段】プラントに制御信号を与えた時に取得する計測信号の値を推定する統計モデルと、前記統計モデルの構築に用いるデータを保存するモデル構築データベースと、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する操作方法学習部と、前記モデル構築データベースに保存される情報に含まれる解析モデルデータの選択、又は計測モデルデータを削除する機能を具備するモデル修正部とを備え、前記統計モデルは前記モデル修正部によるモデルデータの修正結果を用いてモデル出力を生成する制御装置。
(もっと読む)
路面を塗布するシステム及び方法
【課題】より高品質の作製路面をより確実に得られるように、路面を塗布する既知のシステム及び方法を改善する。
【解決手段】路面を塗布するシステムは、1つ又は複数の調整パラメタを其々有する複数の操作部品9と、そこから調整パラメタを操作部品9に伝達する開ループ制御装置17を備える。本発明によるシステムは、測定量22を考慮に入れて、少なくとも1つの指定した目標値26を得るために、最適調整パラメタ18を決定し、複数の最適調整パラメタ18を提示する命令データセットを生成し、複数の最適調整パラメタ18を提示する当該命令データセットを開ループ制御装置17に伝達するように構成する閉ループ制御システム25を特徴とする。また、本発明は、路面を塗布するシステム、特に道路仕上げ機を制御する方法にも関する。
(もっと読む)
制御装置、移動体、制御方法、及びプログラム
【課題】複数のフィードバック補償器を有し、これらを順次切り換える制御系において、切り換え時の過渡応答の特性を向上させるようにする。
【解決手段】切換以降の過渡応答、制御入力の振幅、制御入力の差分値、及び切換直前と直後の制御入力の差分値を抑制する評価関数を設計し、この評価関数を最小化する倒立2輪走行用フィードバック補償器60の状態ベクトルの初期値を与える。これによって、制御切換後の過渡応答や、制御入力の振幅、不連続性を向上させることができる。
(もっと読む)
能動適応ジャイロスタビライザー制御システム
歳差情報だけに基づいて海洋船舶の運動を安定化するためのジャイロスタビライザー制御システム及び方法。制御システムは自動利得制御(AGC)歳差コントローラ(60)を用いる。システムはジャイロフライホイール(12)に可能な限り大きな歳差−歳差が大きくなるほど、ロール安定化モーメントが大きくなる−を発現させるように、常に漸進的に最小化される利得因子を用いて動作する。この連続利得変化により、海況及び航行状態の変化への適応が与えられる。システムは最大歳差に到達する確度を有効に予測する。このイベントが検出されると、制動歳差トルクを与えるため、利得が急速に高められる。イベントが過ぎてしまうと、システムは再び利得を漸進的に低下させようとする。 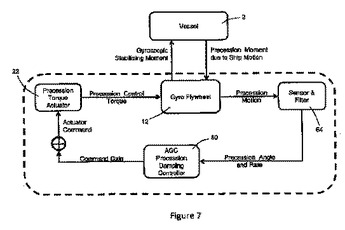 (もっと読む)
(もっと読む)
適応制御装置
【課題】負荷変化や制御対象の特性変化に対しても即応でき、より優れた応答特性を実現し得る適応制御装置を提供する。
【解決手段】ループゲイン調節器7、適応制御器5およびPI制御器3を有し、制御偏差ea(t)を自乗する乗算器16と、乗算器16の出力を入力とする1次遅れ要素17と、を備えた適応制御器5の可変ゲイン演算部11において、制御偏差ea(t)の変動傾きが負のときの1次遅れ要素17の時定数を制御偏差ea(t)の変動傾きが一定または正のときの1次遅れ要素17の時定数よりも大きい値に設定する。
(もっと読む)
関節の運動シミュレーションに関するシステム及び方法
【課題】人工器官の要素の加速摩耗試験中に、人工器官の要素を駆動する人工器官駆動機構を備えたシミュレータを提供する。
【解決手段】シミュレーション入力は、シミュレータの動作を表し、センサ機構を使用し、人工器官の要素に加えられる力及びトルクを測定する。位置制御センサ及び向き制御センサをさらに使用し、人工器官要素の変位を測定する。センサに応答する閉ループフィードバック制御システムを使用して、駆動機構の駆動信号を決定する。制御システムは、有利には、靱帯繊維の機械的表現を組み込む計算モデルを追加する。計算モデルは、人体内の人工器官が直面するであろう状況の非人間近似であり、靱帯繊維の挿入部位及び機械的特性の寸法的幾何学的形状を含む。
(もっと読む)
多段プロセスとその制御
多段プロセスを制御する方法を提供する。本プロセスは、原料から中間製品を生成する複数の第1段階プロセスと中間製品から最終製品を生成する複数の別段階プロセスとを含む。第1段階プロセスは複数の中間プロセスを含み、別段階プロセスは最終製品を生成する複数の最終プロセスを含む。中間制御装置は最終製品EPの1つまたは複数の製品特性に応じて第1段階プロセスを制御し、別の制御装置FCは中間製品の製品特性に応じて別段階プロセスを制御する。多段プロセスは、最終プロセスと中間プロセスのそれぞれにプロセス値を割り当てる工程を更に含む。中間制御装置ICは、最終製品を生成するための全体プロセス値を最適化するように中間プロセスの動作を制御する。最終制御装置FCは全体プロセス値を最適化するように中間制御装置ICの動作に応答する。 (もっと読む)
制御パラメータ適合装置
【課題】適合データの信頼性を向上させることができる制御パラメータ適合装置を提供する。
【解決手段】電動パワーステアリングシステムの機械的な構成要素が持つ粘性摩擦及びクーロン摩擦等の動的特性の製品間のばらつきを加味して、ハンドルの自励振動等の特定の問題が最も発生しやすい条件を有してなる検証用モデルを備えた。そして当該検証用モデルに、適合された制御パラメータである適合データを与えて電動パワーステアリングシステムの動作をシミュレーションするとともに、当該シミュレーションの結果に基づき前記適合データの妥当性を検証する。これにより、量産時における製品間の動的特性のばらつきを考慮した制御パラメータの設定が可能となる。ひいては、適合データの信頼性が高められる。
(もっと読む)
化学的エンジニアリング工程を制御する明確なスイッチを有する二自由度制御方法
本発明は、プロセスエンジニアリング工程の閉ループ制御を実行する方法に関し、目標値の軌跡が閉ループ制御変数に提供され、プロセスの閉ループ制御変数及び更なる状態変数が検出され、制御誤差及びこれに基づく閉ループ制御操作変数が制御アルゴリズムによって算出され、加えてパイロット制御操作変数が決定され、生成操作変数が、閉ループ制御操作変数及びパイロット制御操作変数から算出され、プロセス中に設定される。制御アルゴリズム及びまたはパイロット制御の構造は、閉ループ制御変数、更なる状態変数及び/または目標値の軌跡の関数として変更される。更に、本発明は、閉ループ制御装置及び本方法を実行するコンピュータプログラムに関する。 (もっと読む)
フィードバック制御装置とフィードバック制御方法
【課題】むだ時間を含む制御対象に対して、安定して制御を行うことができ、かつ、制御量の応答性が良好となるフィードバック制御装置と、フィードバック制御の制御方法とを提供する。
【解決手段】制御量を検出する検出手段と、むだ時間を除いた制御対象の伝達関数の逆モデルに、制御量を入力して、第一出力値を得る第一出力値計算手段と、操作量から、第一出力値を減算して、第二出力値を得る第二出力値計算手段と、むだ時間を除いた前記制御対象の伝達関数に、第二出力値を入力して、第三出力値を得る第三出力値計算手段と、目標値から、制御量を減算して、制御偏差を得る制御偏差計算手段と、制御偏差から、第三出力値を減算して、補正された制御偏差を得る制御偏差補正手段と、補正された制御偏差を入力して、操作量を得るPID制御器と、を具備するものである。
(もっと読む)
制御装置
【課題】一部の制御出力の偏差を見かけ上0とする特定の状況下において、有利な制御入力を再現できるようにする。
【解決手段】内燃機関またはこれに付帯する装置に係る複数の制御出力をそれぞれの目標値に追従させる制御を実施するものであって、制御出力とその目標値との偏差の時間積分xz及びそれ以外のものxyを含む、各制御出力毎に個別の状態変数を参照して、線形入力及び非線形入力を反復的に演算するスライディングモードコントローラ51と、ある制御出力の偏差を0と見なす特定期間にあるときに、前記非線形入力を規定する、当該制御出力に係る状態変数xz及びxyについての多項式Szxz+Syxyを0とする補正制御部52とを具備する制御装置5を構成した。ここで、Szは切換超平面を構成する行列Sの成分のうち前記状態変数xzに乗ずる列ベクトルであり、Syは同行列Sの成分のうち前記状態変数xyに乗ずる列ベクトルである。
(もっと読む)
制御装置
【課題】入出力特性が刻々と変化するプラントに対して高い制御性能を維持できる上、一部の制御出力の偏差を見かけ上0とする特定の状況下においても有利な制御入力を再現できるような制御装置を実現する。
【解決手段】第一の制御出力とその目標値との偏差の時間積分x1z及びそれ以外のものx1y、並びに、第二の制御出力とその目標値との偏差の時間積分x2z及びそれ以外のものx2yを含む、各制御出力毎に個別の状態変数を参照して、線形入力及び非線形入力を反復的に演算するスライディングモードコントローラ51と、第二の制御出力の偏差を0と見なす特定期間にあるときに、前記非線形入力を規定する、当該第二の制御出力に係る状態変数x2z及びx2yについての多項式S2zx2z+S2yx2yを0とする補正制御部52とを具備する制御装置5を構成した。
(もっと読む)
1 - 20 / 57
[ Back to top ]