
Fターム[5H004GB12]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 輸送系 (207) | 自動車 (162)
Fターム[5H004GB12]に分類される特許
1 - 20 / 162
情報処理装置及びエンジン制御装置
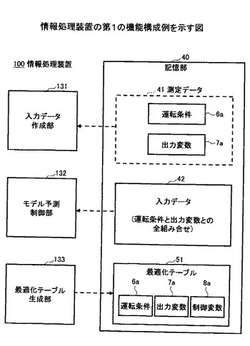
【課題】 本発明の課題は、自動車等の動作装置の運転条件及び動作装置の性能を示す出力変数とから、モデル予測制御により計算したその性能が最適となる動作装置を制御するための制御変数を、運転条件及び出力変数とから取得可能なテーブルを自動生成することを目的とする。
【解決手段】 上記課題は、動作装置を運転する運転条件と、該運転条件に応じて該動作装置を制御した際の該動作装置の性能を示す出力変数とを記憶する記憶部と、前記記憶部に記憶されている前記運転条件と前記出力変数との組み合せ毎に、該運転条件と該出力変数とから該動作装置の制御変数を予測するモデル予測制御によって、前記出力変数を最適にする該制御変数を計算する予測制御部と、前記組み合せ毎に、前記予測制御部によって計算された前記制御変数に係る変数データを対応付けたテーブルを生成するテーブル生成部とを有する情報処理装置により達成される。
(もっと読む)
車載動力プラントの制御装置

【課題】車載動力プラントの状態量に課せられた制約条件が満足されるようにリファレンスガバナを用いて目標値を整形するにあたり、状態量の将来の軌道の予測に要する演算負荷を低減する。
【解決手段】車載動力プラントの制御装置はフィードバックコントローラとリファレンスガバナとを備える。フィードバックコントローラは、特定状態量の実値を目標値に近づけるようにフィードバック制御によってアクチュエータの操作量を決定する。リファレンスガバナは、フィードバック制御にかかる閉ループ系の動特性が「むだ時間+2次振動系」でモデル化されたプラントモデルを用いて特定状態量の将来の軌道を予測し、特定状態量に課せられる制約を満足するように目標値を整形する。本制御装置によれば、リファレンスガバナにおける予測長は、プラントモデルにおけるむだ時間と2次振動系の振動周期の半分の時間との合計時間に設定される。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置
【課題】最短時間制御にフィードバック制御の要素を取り入れると共に、制御終了後に制御出力を収束できるアクチュエータの制御方法及び制御装置を提供する。
【解決手段】最短時間制御を用いると共に、制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出し、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了すると共に、予め設定した時間毎に切替時刻t1と終了時刻t2を繰り返して算出して更新し、更に、制御系が持つ残り仕事と運動エネルギーの和である残留エネルギーの減少と共に、制御出力を小さくする。
(もっと読む)
内燃機関の制御入力値演算方法
【課題】複数のコアが搭載されたマルチコアプロセッサを用いて内燃機関のアクチュエータの制御入力値を高速且つ高精度に演算することのできる内燃機関の制御入力値演算方法を提供する。
【解決手段】運転条件としてエンジン回転数Neと燃料噴射量Qとを検出する(ステップ100)。検出された運転条件の動作点が、運転条件格子空間上のどのセル(格子)に属するかを判定する(ステップ102)。エンジン状態量としての過給圧pimおよびEGR率egrを取得するとともに、これら状態量の各追従誤差の積分値を算出する(ステップ104)。スケジューリングパラメータρ1〜ρ4を算出する(ステップ106)。複数のコアのそれぞれにおいて、入力変数ベクトルu1〜u4をそれぞれ並列に演算する(ステップ108)。空きコアを探索し(ステップ110)、動作点での制御入力値uを算出する(ステップ112)。
(もっと読む)
規範応答演算装置およびそれを用いた車両用制駆動力制御装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用制駆動力制御装置を提供する。
【解決手段】 入力信号uに進み遅れ要素を与えて規範加速度応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいて第1および第2ゲインy1,y2を演算する第1および第2非線形フィルタ17,18と、規範応答ベース値にゲインy1,y2を乗算して規範加速度応答を演算する乗算器19と、を備える。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置
【課題】車両燃費改善のため車両のエネルギーを有効に活用するための機構及びその制御方法で、PID制御に代わる新たな制御手法として、より簡便な方法で制御結果が得られるアクチュエータの制御方法及びアクチュエータの制御装置を提供する。
【解決手段】制御対象の運動エネルギーと制動可能仕事を比較し、前記制御対象の運動エネルギーと前記制動可能仕事が等しくなった時点で駆動から制動に切り替えると共に、前記制御対象の運動エネルギーと前記制動可能仕事の比較を予め設定した時刻毎に繰り返し行う「エネルギー評価制御」を行う。
(もっと読む)
制御装置の設計支援装置および設計支援方法、ならびに制御装置
【課題】入力信号間または入出力信号間で信号周期が異なる制御装置を簡易に設計する。
【解決手段】本発明にかかる設計支援装置は、第1センサおよび第2センサからの入力信号に基づいて制御対象へ制御信号を出力する制御装置を設計するための設計支援装置であって、第1センサから入力される第1入力信号の入力周期、第2センサから入力される第2入力信号の入力周期、制御対象への制御信号の出力周期を、ユーザから受け付ける周期入力手段と、制御装置の設計情報をユーザから受け付ける設計情報入力手段と、第1入力信号と第2入力信号の信号周期を制御信号の出力周期にレート変換するフィルタ機能と、レート変換された第1入力信号と第2入力信号を入力として前記設計情報にしたがって制御対象への制御信号を演算するための演算機能と、を含むプログラムコードを出力するコード生成手段と、を備える。
(もっと読む)
差し迫った制御不安定性の検出
【課題】対象物に刺激を与えるシステムにおいて、差し迫った制御不安定性を検出してこれを回避する方法を提供する。
【解決手段】システム110は、刺激エフェクター120により対象物100に刺激が与えられている間にセンサー130により対象物の発振を示すシステムパラメータを表すパラメータ信号OSCを測定する。制御装置140はパラメータ信号の選択された周波数帯における支配的なトーンの最大振幅を監視し、最大振幅が指定された期間にわたって持続する場合、制御不安定性を回避する信号CSを刺激エフェクター120に与える。
(もっと読む)
非線形適応モデルベース制御の設計方法及び制御装置並びにプログラム
【課題】PIDのような複雑なマップを必要としない制御の体系的な設計方法及びこれを利用した制御装置並びにプログラムを提供する。
【解決手段】対象となる機械全系の物理モデルを受け、当該物理モデルを簡略化し、前記簡略化したモデルに対応する状態方程式を求め、当該状態方程式を用いて予め定められた制御系のパラメータを求めることにより当該制御系の設計を行うことを特徴とする非線形適応モデルベース制御の設計方法である。
(もっと読む)
制御マップ最適化方法
【課題】車両動作制御装置等において用いられる制御マップを、従来に比して精度良く、簡易に最適化可能とする。
【解決手段】2種類の物理量を入力パラメータとし、その2種類の入力パラメータに対して定まる第3の物理量を出力としてなる制御マップは、先の2種類の物理量と、この2種類の物理量に対して定まる第3の物理量は、これら3つ物理量の組合せで一組の制御データをなし、この制御データに対する座標空間として、先の2種類の物理量を、それぞれx軸座標、y軸座標に、先の第3の物理量をz軸座標に、それぞれ配する3次元座標空間を設定し、粒子群最適化アルゴリズムに基づく、z軸座標の座標点に相当する複数のエージェントを、粒子群最適化アルゴリズムに基づいて先の3次元座標空間を探索空間として同時に移動させることによって当該エージェントの座標点の最適解を得て、制御マップの出力値とすることで最適化を図る。
(もっと読む)
多重系モータの制御装置及び移動体
【課題】積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供する。
【解決手段】本発明の一形態に係る多重系モータの制御装置は、速度指令と実速度との偏差に基づいて、多重系モータ51の一つの系をそれぞれ制御する、第1の制御系11と第2の制御系21とを備え、第1の制御系11は、多重系モータ51の一つの系をPI制御し、第2の制御系21は、多重系モータ51の他の一つの系をP制御する。これにより、積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供することができる。
(もっと読む)
簡易手動自動切り替え装置
【課題】手動自動切り替え装置に関し、断線時の切り替え時に安全性を確保し、自動化制御・運転操作全体が簡素化でき、装置の適用分野を拡大できる。
【解決手段】1)手動自動切り替えスイッチの前の正規化ゲイン設定機能によって、固有周波数等の時間に関する第1正規化を行い、手動自動切り替えスイッチの後の正規化ゲイン設定機能によって、プロセスゲイン等のプロセス量に関する第2正規化を行うように振り分ける。2)プロセス量が閾値を超えたときの処理方式として従来の高負荷(高速)運転系や系統連係時のような群運転系における手動移行時操作量保持処理以外に、低負荷(低速)運転系や単独運転系や条件によって適正モードが異なる系などに対する操作量遮断処理によるプロセスの自動遮断モードの条件選択機能も設ける。3)実機においても、実施例のようなシミュレーションによる確認が行えるテストモードを有する手動自動切り替え機能を設ける。
(もっと読む)
制御装置
【課題】学習値がハンチングすることの抑制と、補間処理負荷の軽減との両立を図った制御装置を提供する。
【解決手段】複数種類の変数p,Q及び制御パラメータtdを要素とした学習ベクトルを計測ベクトルに基づき補正することで制御パラメータtdを学習する学習手段と、現状の環境に即した変数である現状変数に対応した制御パラメータ(補間ベクトルTD(h)のtd)を、学習した制御パラメータTDから補間して算出する補間手段S25と、を備える。そして、前記補間手段は、複数の学習ベクトルTDの中から3つの学習ベクトルTD(A),TD(B2),TD(C2)を選択する選択手段S21,S22,S23を有するとともに、前記現状変数に対応した制御パラメータ(補間ベクトルTD(h)のtd)を、選択した3つの学習ベクトルTD(A),TD(B2),TD(C2)を含む平面Flatで補間して算出する。
(もっと読む)
能動型振動騒音抑制装置
【課題】伝達系の温度が変化することにより実際の伝達関数が変化したとしても、適応制御に用いる伝達関数の推定値と実際の伝達関数とのずれを抑制することにより、高精度に振動や騒音を抑制できる能動型振動騒音抑制装置を提供する。
【解決手段】推定伝達関数記憶部160に、伝達系の温度Tを複数に区分した温度範囲毎に、伝達系の伝達関数の推定値Ghを記憶する。そして、フィルタ係数更新部170は、検出温度Tが含まれる温度範囲における伝達関数の推定値Ghと残留信号eとにより算出される更新値に基づいて、制御信号yの適応フィルタのフィルタ係数a、φを更新する。また、伝達関数同定処理部180は、検出温度Tがそれぞれの温度範囲に含まれる場合にそれぞれの伝達関数Gの同定処理を行い、算出されたそれぞれの伝達関数の推定値Ghを推定伝達関数記憶部160に記憶させる。
(もっと読む)
アクチュエータの制御装置
【課題】アクチュエータの動作限界付近での入力外乱抑圧性能を向上させる。
【解決手段】入力外乱抑圧性能を持つフィードバック制御器(スライディングモード制御器)と、そのフィードバック制御器で生成した制御入力と入力制限値との差にゲインを乗じた値を上記フィードバック制御器の入力側にフィードバックするアンチワインドアップ制御器とを備えたアクチュエータの制御装置において、上記入力制限値を、アクチュエータの動作限界値から決定される入力量に、入力外乱抑圧性能を持つフィードバック制御器で補償すべき入力外乱を加えた値に設定する。このような設定により、アクチュエータの動作限界値まで制御入力の演算が可能になり、その動作限界付近での入力外乱抑圧性能が向上する。
(もっと読む)
障害を弱めるための方法
【課題】障害が識別されるだけではなく、有効信号に対する影響ができる限り小さくなるように障害を弱め且つ最少化し、障害を受けていない有効信号のダイナミクスができるだけ維持されるように拡張する、直接制御量の障害を弱めるための方法を提供する。
【解決手段】操作量が有効信号であるときに、閉制御回路内の直接制御量の障害を弱めるための方法において、直接制御量がそれぞれ相連続する二つの走査時点で連続的に測定され、直接制御量の値が差し引かれ、この差の大きさが予め定められている基準値だけずれている場合に、少なくとも一つの制御パラメータが、障害に対する操作量の反応が最少化されるように変化される。
(もっと読む)
スライディングモード制御装置の制御入力設定方法
【課題】スライディングモード制御装置において、切換入力の平滑関数パラメータを理論的に決定できるようにする。
【解決手段】平滑関数パラメータδを、定常偏差σと切換入力unlとを座標軸とする座標上で定常偏差限界σeに安全率を見込んだ値σth[σe−安全率]と入力変動最大値dmaxとによって定まる点Paと座標の原点[0,0]とを結ぶ直線Laよりも切換入力軸側の範囲で設定することで、定常偏差限界σeの時に切換入力unlが入力変動最大値dmaxよりも上回るようになり、入力変動に対するロバスト性を確保することができる。このように、平滑関数パラメータδを、σ−unl座標を用いて定常偏差限界σeと入力変動最大値dmaxとに基づいて設定することで、平滑関数パラメータδを理論的に設定することが可能となり、作業者によるチューニング結果やチューニング工数のばらつきを低減することができる。
(もっと読む)
フィードバック制御装置
【課題】制御開始時の値付近での実制御量の停滞による応答遅れの増大が発生したときの実制御量のオーバーシュートを好適に抑制することのできるフィードバック制御装置を提供する。
【解決手段】第2ピストンの実変位RYを含むCSC2の状態量の検出及び推定を行うオブザーバー6と、目標軌道に追従して実変位RYが推移するように上記状態量に基づきマスターシリンダー1の供給電流を操作するとともに、実変位RYと目標軌道との偏差Eの累積値である誤差積分値Zに応じて供給電流を操作する積分器5を有したスライディングモードコントローラー4と、を備えるフィードバック制御装置において、実変位RYが制御開始時の値付近で停滞しているか否かを判定するとともに、停滞有りと判定されたときに、目標軌道及び推定状態量X0,X1,X2の初期化を指示する停滞監視部7を備えるようにした。
(もっと読む)
制御装置
【課題】離散時間系の制御対象モデルを用いて、所定の拘束条件が複数のモデルパラメータ間に存在する制御対象や、1次遅れなどの遅れ特性を有する制御対象を制御する場合において、制御精度および制御の安定性を向上させることができる制御装置を提供する。
【解決手段】制御装置1は、ECU2を備える。ECU2は、2つのモデルパラメータα,1-αを含む制御対象モデルを整理し、モデルパラメータαが乗算されていない項および乗算されている項を制御対象モデルの左辺および右辺にそれぞれ振り分けるとともに、左辺を合成信号値W_actとし、右辺を推定合成信号値W_hatとしたときに、合成信号値と推定合成信号値との間の同定誤差eid'が最小となるように、モデルパラメータαの同定値αidをオンボードで算出し、この同定値αidと制御対象モデルから導出された制御アルゴリズム(式(34),(35))とを用いて、空燃比補正係数KAFを算出する。
(もっと読む)
プラントの制御装置
【課題】 プラントを制御する制御量のリミット処理を行うことによる制御性の悪化を最小限に抑制することができるプラントの制御装置を提供する。
【解決手段】 リミット処理の対象となるフィードバック制御量UMとリミット処理後フィードバック制御量UMFとの差分値dLMTの過去値に応じて、フィードバック制御量の修正値DLMが算出され、フィードバック制御量Uを修正値DLMにより修正して、修正フィードバック制御量UMが算出される。修正フィードバック制御量UMのリミット処理が行われ、リミット処理後フィードバック制御量UMFが制御入力としてプラントに入力される。修正値DLMは、プラントの応答特性を示す応答特性パラメータαに応じた値に設定される修正係数KMと、差分値dLMTの過去値とを用いて算出される。
(もっと読む)
1 - 20 / 162
[ Back to top ]