
Fターム[5H004GB15]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 物流工程、製造工程 (321)
Fターム[5H004GB15]の下位に属するFターム
ロボット(マニピュレータ) (133)
クレーン (2)
CIM、FMS (4)
Fターム[5H004GB15]に分類される特許
1 - 20 / 182
駆動システム及び駆動方法、並びに露光装置及び露光方法
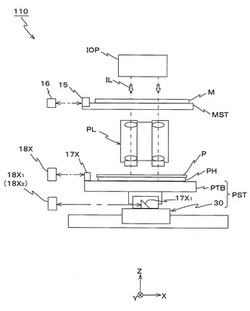
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
制御装置及び制御方法

【課題】状態に応じて制御則を切り替えて操作量を演算する制御装置及び制御方法のために演算負荷を低減する手法を提供する。
【解決手段】制御装置100は、状態空間を分割する複数の凸多面体の各々に制御則が対応付けられており、状態ベクトルの属する凸多面体に対応する制御則を使用して操作量を演算する速度制御器110と、状態空間を規則的に区切る複数のメッシュのうち状態ベクトルの属するメッシュに関連する制御則を候補として、状態ベクトルの属する凸多面体に対応する制御則を該候補から決定する検索器112と、を備える。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】ステップ応答制御においてエネルギー使用量が一定値を大幅に超えないように、かつ設定値への追従特性が損なわれないようにする。
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(12)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、使用電力総量が割当総電力を超えない必要出力を各制御ループの操作量出力上限値とする電力抑制部(16〜18)と、昇温時間が最大限度時間以内でない場合に、各制御ループの必要出力を、各制御ループの制御量を最大限度時間の間に設定値変更に応じた量だけ変化させるのに必要な操作量として計算し直し、この必要出力を各制御ループの操作量出力上限値として再設定する補正設定部(21)と、制御部(23−i)とを備える。
(もっと読む)
適応制御装置および適応制御方法ならびに射出成形機の制御装置および制御方法
【課題】 応答性の悪化を防止しつつ最適な適応制御を自動的かつ簡単に行うことができる適応制御装置および適応制御方法ならびに射出成形機の制御装置を提供する。
【解決手段】 制御対象2から出力される制御値yに並列フィードフォワード補償器4から出力される補償値yfを加えた帰還値yaと指令値rに基づいて操作値uを出力するようにしてフィードバック制御を行う適応制御装置であって、並列フィードフォワード補償器4は、制御対象2の周波数応答特性を逐次推定する同定機構6と、当該周波数応答特性に基づいて補償値yfを調整する調整機構7とを備えている。
(もっと読む)
出力制御方法および出力制御装置
【課題】位相制御器を用いずに、分解能を低下させることなく、オン/オフされる操作対象の出力を平滑化することができる、出力制御方法および出力制御装置を提供する。
【解決手段】まず、一定の制御周期Ts内にリレーをオンさせるオン信号を出力するオン期間Tsonおよびリレーをオフさせるオフ信号を出力するオフ期間Tsoffが設定される。次に、制御周期Tsに対するオン期間Tsonの割合Msおよびリレーに向けて出力可能な最小のパルス幅である出力最小期間dTsに基づいて、制御周期Ts内に複数の小時分割周期Tssが設定される。そして、各小時分割周期Tssにおいて、制御周期Tsに対するオン期間Tsonの割合Msに応じた期間にわたって、リレーに向けてオン信号が出力され、残りの期間にわたって、リレーに向けてオフ信号が出力される。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】ステップ応答制御においてエネルギー使用量が一定値を超えないように、かつ設定値への追従特性が損なわれないようにする。
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(11)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、使用電力総量が割当総電力を超えない必要出力を各制御ループの操作量出力上限値とする電力抑制部(15〜17)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(21)と、総電力実測値が割当総電力より小さい場合に補正係数HSを大きくする第2の補正係数更新部(22)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部(23)と、制御部(24−i)とを備える。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】定常状態において電力使用量が一定値を超えないように、かつ外乱抑制特性が可能な限り損なわれないようにする。
【解決手段】電力総和抑制制御装置は、割当総電力の情報を受信する割当総電力入力部(10)と、総電力実測値を取得する総電力実測値入力部(11)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(12)と、使用電力が最大状態に到達していると見なされる状況で総電力実測値が割当総電力より小さい場合に補正係数を大きくする第2の補正係数更新部(13)と、各制御ループの電力余裕が公平な状態に近づくように操作量出力上限値を算出する電力抑制手段(14〜20)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部21と、制御ループ毎に設けられ、操作量を算出して操作量の上限処理を実行する制御部(22−i)を備える。
(もっと読む)
制御装置、照射装置及び駆動装置
【課題】複数のモータの制御において、同期の高精度化及び制御の高速化の両立に有利な技術を提供する。
【解決手段】複数のモータのそれぞれについてフィードフォワード制御器を備え、前記複数のモータをそれぞれ制御する制御装置であって、前記フィードフォワード制御器の少なくとも1つは、当該フィードフォワード制御器が制御対象とするモータとは異なる少なくとも1つのモータの入出力特性を表す関数を含む、ことを特徴とする制御装置を提供する。
(もっと読む)
制御装置および方法
【課題】設定値変更時において制御手段とそれ以外の手段との間で行われる信号伝達の頻度を減らしつつ、各制御ループの制御量が設定値に達する時間がほぼ同じになるようにする。
【解決手段】制御装置は、複数の制御ループLiの設定値SPiが変更されたとき、各制御ループLiの操作量出力上限値OHiを規定出力上限値MOiにしたときに各制御ループLiの制御量PViが設定値SPiまで達するのに必要な昇温時間TLを推定する昇温時間推定部1と、昇温時間TLで制御量PViが設定値SPiまで達するのに必要な操作量出力MUiを制御ループLi毎に推定する必要出力推定部2と、操作量出力MUiを各制御ループLiの操作量出力上限値OHiとして一時的に設定する出力上限設定部3と、制御ループLi毎に設けられた制御部5−iとから構成される。
(もっと読む)
気相成長装置、気相成長装置の温度制御方法および温度制御プログラム
【課題】 被処理物の温度を推定し、装置内の各種状態に影響を受けない温度制御を行う。
【解決手段】 被処理物を加熱する加熱手段と、加熱手段の温度を検出する第1検出手段を有する気相成長装置であって、気相成長装置は、当該気相成長装置の状態を検出する第2検出手段と、第1検出手段で検出された温度と、第2検出手段で検出された状態に基づいて、被処理物の表面温度を推定する温度推定手段と、温度推定手段で推定した表面温度を、予め定められた目標温度になるよう加熱手段を制御する温度制御手段によって解決する。
(もっと読む)
制御パラメータ推定方法及び制御パラメータ設定装置
【課題】 送り装置において、移動体の位置や各指令移動位置を補正する制御を的確に行う。
【解決手段】 送り装置の制御において、駆動モータに入力されるトルク値をTとして、移動体を軸方向に往復動させ、一定時間毎又は移動体の予め定められた位置毎の駆動モータの角速度ωを計測し、計測された各角速度ω及びその時の前記入力トルクTを基に、下式に従って、各角速度ω及び入力トルクTに応じたパラメータTdを算出した後、算出したパラメータTdの前記位置への依存が小さくなるように、パラメータJ及びDの少なくとも一方の値を調整して、パラメータTdを再算出し、得られた調整後のパラメータJ、D及びTdの値を該パラメータJ、D及びTdの適正な値と推定する。
(数1)
Td=T−J(dω/dt)−Dω
(もっと読む)
位置制御装置の制御パラメータ調整方法及び制御パラメータ調整システム
【課題】複数の駆動系が駆動時に互いに摩擦力を及ぼし合う関係にある位置制御装置の制御パラメータを調整する作業を簡単化する。
【解決手段】位置制御装置28により2つの駆動系のモータ16,24を同時に駆動して各駆動系の位置決めデータを採取し、遺伝的アルゴリズムを用いて各駆動系の位置決めデータの特徴量を評価して、その評価値が要求性能(設計仕様)を満足するように位置制御装置28の制御パラメータを調整する。この際、各駆動系の位置決めデータとして、位置指令波形、実位置波形及びトルク波形を採取し、各駆動系の位置決めデータの特徴量として位置決め波形を評価するようにすると良い。また、調整対象となる制御パラメータは、例えば、位置指令パラメータ、フィードバックゲインパラメータ及びフィードフォワードゲインパラメータである。
(もっと読む)
電動機器のシステム設計支援装置
【課題】総合的に電動機器全体のシステムの設計を行なうことが難しい。
【解決手段】システム設計支援装置は、解析手段10と、プログラム実行手段20と、記憶手段30と、入力手段40と、動作結果と設計要素を選択的に一覧表示する表示手段50と、システム設計モデルを有機的に結合させるモデル結合手段60と、設計要素を調整または変更する変更手段70と、を備える。解析手段10は、リニアモータ6の変動推力Frを減じた推力Fmを演算する推力演算手段11と、変位δを減じた検出位置Xiと検出速度Viとを演算する移動量演算手段12と、位置と速度の誤差を補正した移動指令に従う制御量Hcを演算する制御量演算手段13と、制御量Hcに対応する電流振動Irを減じた駆動電流Iiを演算する駆動電流演算手段14と、指令位置Pjと指令速度Vjを演算する指令値演算手段15と、を含んでなる。
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御機構であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる流体制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体に関する物理量を測定する流体測定部1と、前記流体測定部で測定される物理量の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御機構4とを備えた流体制御装置100であって、前記バルブ制御機構4が、前記測定値と前記設定値の偏差に基づいてデジタル制御によって前記流体制御バルブ2の開度の操作量を演算する操作量演算部41と、アナログ制御によって位相遅れを補償する位相補償部42と、を備えた。
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御器であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる圧力制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体の圧力を測定する圧力センサ3と、前記圧力センサ3で測定される圧力の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御器4と、を備え、前記バルブ制御器4が、入力される値に対して所定の演算を施して前記流体制御バルブ2の開度の操作量に関連する値を演算する操作量演算部41と、入力される値に対してデジタル制御により位相のずれを補償した値を出力する位相補償部42と、を備えた。
(もっと読む)
用役設備の最適運転システム
【課題】製造工場における用役設備の運転において、需要予測の誤差が大きい場合や制御周期の時間内で用役需要が急激に変化する場合でも、用役設備を高効率で運転し、用役の需要と供給を一致させることにより、CO2排出量を削減する用役設備の最適運転システムを提供する。
【解決手段】用役需要予測結果に基づいてCO2排出量を最小化するように用役設備の最適運転計画を実施し、各用役毎に起動する用役設備の中で少なくとも1台の用役設備は負荷率を設定せず、他の用役設備は負荷率を設定して用役設備を運転し、各用役毎に、需要予測値と実績値の差が予め設定した許容値以上になった場合は、実績値に基づいて用役需要予測値を補正して最適運転計画を実施し、負荷率を設定しない設備以外の設備の負荷率を再度設定する。
(もっと読む)
タイムラインに基づく半順序プランニングの枠組み
【課題】計画がタイムラインの集合として形成された複数のタイムラインの形式で作成される環境における変数を表す、オンライン半順序プランニングシステムおよび方法を提供する。
【解決手段】開始点において、タイムラインの集合は、一貫性のないタイムラインの集合であり、システムおよび方法は、タイムラインの集合が一貫性を持つまで、タイムラインを体系的に改良する。
(もっと読む)
制御問題を解決するための方法
【課題】工作機械などのオートメーションアプリケーションにおいて、モデル予測制御をリアルタイムで実行できるよう2次計画(QP)問題を解決する方法を提供する。
【解決手段】所定時間間隔にわたって、最適化問題を、2次コスト関数、線形状態および制御制約で、アプリケーションのための2次計画として定式化する。そして、アプリケーションのための制御動作130を得るために、正の最初の推定値126から始まる並列の2次計画更新法則を適用することにより、マルチプロセッサマシンの並列処理を活用することができ、また簡易であるため、直列式コンピュータ上で実行しても速度的な利点がある。
(もっと読む)
デジタルサーボアンプシステムおよびそのパラメータ調整方法
【課題】デジタル制御を用いたサーボアンプシステムにおいて、パラメータ調整を迅速に進めるとともにパラメータ調整データを保護する。
【解決手段】デジタルサーボアンプシステムは、ネットワーク経由でパラメータを調整するパラメータ調整装置140を有する。センサ201〜203の信号と目標指令とをデジタル信号に変換し、パラメータ調整装置が調整したパラメータを用いてデジタル制御信号をサーボアンプユニット120が生成する。サーボアンプユニットは、デジタル変換されたセンサ信号と指令信号とを比較演算して制御信号を生成するサーボ制御部222と、演算に使用するパラメータを管理するパラメータ管理装置227とを有する。パラメータ管理装置は、パラメータ調整装置からのパラメータ更新通知に基づいて記憶装置226に更新されたパラメータを書込んでいるときは、サーボ制御部が記憶装置へアクセスすることを禁止する。
(もっと読む)
高度プロセス制御システム及び信頼指数を有する仮想測定による方法
【課題】R2RモデルでのVMのデータ品質を効果的に考量でき、R2R制御及び測定遅延のVMフィードバックループでの信頼度を考量できない問題を克服し、且つ、APC効能を向上させる方法を提供する。
【解決手段】APCシステムは、工程ツール100と、測定ツール110と、仮想測定(VM)モジュール120と、信頼指数(RI)モジュール122と、R2Rコントローラ130とを備える。工程ツールに使用される、複数の履歴ワークを処理するための複数組の履歴工程データを取得し、測定ツールによって履歴ワークの複数の履歴測定データを取得する。複数組の履歴工程データ及び履歴測定値を用いることによって、推定アルゴリズムに基づいて推定モデルを構築し、複数組の履歴工程データとそれらに対応する複数組の履歴測定値を用いて、参照モデルを構築する。R2Rコントローラは工程ツールを制御して、工程ランを実行させる他のステップを実行する。
(もっと読む)
1 - 20 / 182
[ Back to top ]