
Fターム[5H004HB08]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 速度、角速度 (235)
Fターム[5H004HB08]に分類される特許
1 - 20 / 235
駆動システム及び駆動方法、並びに露光装置及び露光方法
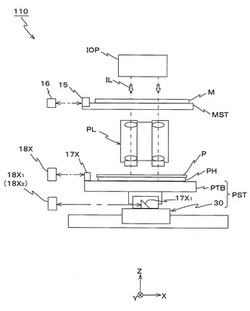
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
制御装置及び制御方法

【課題】状態に応じて制御則を切り替えて操作量を演算する制御装置及び制御方法のために演算負荷を低減する手法を提供する。
【解決手段】制御装置100は、状態空間を分割する複数の凸多面体の各々に制御則が対応付けられており、状態ベクトルの属する凸多面体に対応する制御則を使用して操作量を演算する速度制御器110と、状態空間を規則的に区切る複数のメッシュのうち状態ベクトルの属するメッシュに関連する制御則を候補として、状態ベクトルの属する凸多面体に対応する制御則を該候補から決定する検索器112と、を備える。
(もっと読む)
内燃機関の制御入力値演算方法
【課題】複数のコアが搭載されたマルチコアプロセッサを用いて内燃機関のアクチュエータの制御入力値を高速且つ高精度に演算することのできる内燃機関の制御入力値演算方法を提供する。
【解決手段】運転条件としてエンジン回転数Neと燃料噴射量Qとを検出する(ステップ100)。検出された運転条件の動作点が、運転条件格子空間上のどのセル(格子)に属するかを判定する(ステップ102)。エンジン状態量としての過給圧pimおよびEGR率egrを取得するとともに、これら状態量の各追従誤差の積分値を算出する(ステップ104)。スケジューリングパラメータρ1〜ρ4を算出する(ステップ106)。複数のコアのそれぞれにおいて、入力変数ベクトルu1〜u4をそれぞれ並列に演算する(ステップ108)。空きコアを探索し(ステップ110)、動作点での制御入力値uを算出する(ステップ112)。
(もっと読む)
センサ情報の統合方法と装置
【課題】誤差と計算量を増大させずに複数のセンサ情報を統合することができる方法と装置を提供する。
【解決手段】新たに受信したセンサ情報Ynを、観測時刻の順に記録し、各センサ情報に対し、第1条件を満たすか否かを判定する(S3)。第1条件は、「そのセンサ情報の観測時刻と同じかそれよりも新しいセンサ情報がすべてのセンサから受信されていること」である。第1条件を満たす場合に、第1条件を満たす各センサ情報6を観測時刻順に用いて、内部状態を予測し、第1推定値X1を予測した内部状態に更新して記憶し、第2推定値X2を更新した第1推定値X1で上書きし、更新に用いたセンサ情報を削除する(S4,S5,S7,S8)。第1条件を満たさない場合に、新たに受信したセンサ情報Ynを用いて、内部状態を予測し、第2推定値X2を予測した内部状態に更新して記憶する(S9)第2推定値X2を対象物の内部状態として出力する(S10)。
(もっと読む)
作動中のプロセス環境における動的プロセスシミュレーションの更新と利用
【課題】オンライン・プロセスシミュレーションを行う際に該シミューレーション・システムが使い易く且つ更新し易くなる態様でプロセスプラントのプロセス制御環境に統合する。
【解決手段】開示のシミューレーション・システムによると、シミューレーション・システムにより生成されたプロセスパラメータの現在の予測値だけでなく将来的な予測値を、性能評価に利用し、並びにプラントの動作を誘導するために利用することが可能になる。また、該シミューレーション・システムは、プロセスプラントに関する様々なオンライン計測値を受信できるように作動中のプロセスプラントに接続されており、シミューレーション・システムで使用されるプロセスモデルを自動的に更新してシミューレーション・システムをプロセスプラントの実際の作動状態と協調(coordinate)した状態に保つために、これらの計測を使用する。
(もっと読む)
制御装置の設計支援装置および設計支援方法、ならびに制御装置
【課題】入力信号間または入出力信号間で信号周期が異なる制御装置を簡易に設計する。
【解決手段】本発明にかかる設計支援装置は、第1センサおよび第2センサからの入力信号に基づいて制御対象へ制御信号を出力する制御装置を設計するための設計支援装置であって、第1センサから入力される第1入力信号の入力周期、第2センサから入力される第2入力信号の入力周期、制御対象への制御信号の出力周期を、ユーザから受け付ける周期入力手段と、制御装置の設計情報をユーザから受け付ける設計情報入力手段と、第1入力信号と第2入力信号の信号周期を制御信号の出力周期にレート変換するフィルタ機能と、レート変換された第1入力信号と第2入力信号を入力として前記設計情報にしたがって制御対象への制御信号を演算するための演算機能と、を含むプログラムコードを出力するコード生成手段と、を備える。
(もっと読む)
ドライブ装置の調整装置
【課題】調整値の変更前後における出力波形の差異を容易に把握することができ、出力波形の比較にかかる手間を低減できるドライブ装置の調整装置を提供する。
【解決手段】ドライブ装置の調整装置において、テストバイアスにテストステップを加えた入力を調整対象であるドライブ装置に与えて出力されたフィードバック波形を採取する波形データ採取部と、前記採取されたフィードバック波形のデータを、前記採取された順序で保持する波形キューと、フィードバック波形が前記採取された時に調整対象に設定されている調整値の情報を、前記採取された順序で保持する調整値キューと、テストステップ波形及び波形キューのフィードバック波形を、重ね合わせ、かつ、それぞれ区別可能に表示可能であるとともに、調整値キューの調整値の情報を、フィードバック波形のそれぞれと対応させて表示可能である表示部と、を備える。
(もっと読む)
負荷適応型制御ループ切り替え方法及び負荷適応型帰還制御装置
【課題】従来の制御ループの切り替え方法では、制御ループの切り替え時に制御対象回路が不安定になる問題があった。
【解決手段】本発明の制御ループの切り替え方法は、第1の誤差積分値INTG1に第1の誤差値ERR1を加算して第1の誤差積分値INTG1を更新し、第2の誤差積分値INTG2に第2の誤差値ERR1を加算して第2の誤差積分値INTG2を更新し、更新後の第1の誤差積分値INTG1と第2の誤差積分値INTG2とのうち小さな値を示す誤差積分値に基づきPWM信号のデューティ比を決定し、更新後の第1の誤差積分値INTG1とINTG2第2の誤差積分値とのうち小さな値を示す誤差積分値で更新後の第1の誤差積分値INTGと第2の誤差積分値INTG1のうちPWM信号のデューティ比の決定に用いられなかった誤差積分値を更新する。
(もっと読む)
フィードバック制御装置、フィードバック制御方法、モータ及びロボット
【課題】所定動作量(例えば動作速度)以下においても位置決め精度の低下や振動の抑制を図ることを目的とする。
【解決手段】制御対象の動作状態を検出する状態検出器を介して、フィードバック信号を取得するフィードバック信号取得手段と、前記フィードバック信号取得手段で取得したフィードバック信号から誤差成分の周期情報を検出する誤差周期検出手段と、制御指令信号、又は前記フィードバック信号と、前記誤差周期検出手段で検出した周期情報とに基づき、前記誤差成分の周波数を算出する誤差周波数算出手段と、前記誤差周波数算出手段で算出した周波数の信号成分を除去するフィルタを用いて、前記制御対象に出力する制御信号をフィルタリングするフィルタリング手段と、前記制御指令信号の示す動作量又は前記フィードバック信号の示す動作量に基づき、フィルタ形状を算出するフィルタ形状算出手段と、を備える。
(もっと読む)
電動機器のシステム設計支援装置
【課題】総合的に電動機器全体のシステムの設計を行なうことが難しい。
【解決手段】システム設計支援装置は、解析手段10と、プログラム実行手段20と、記憶手段30と、入力手段40と、動作結果と設計要素を選択的に一覧表示する表示手段50と、システム設計モデルを有機的に結合させるモデル結合手段60と、設計要素を調整または変更する変更手段70と、を備える。解析手段10は、リニアモータ6の変動推力Frを減じた推力Fmを演算する推力演算手段11と、変位δを減じた検出位置Xiと検出速度Viとを演算する移動量演算手段12と、位置と速度の誤差を補正した移動指令に従う制御量Hcを演算する制御量演算手段13と、制御量Hcに対応する電流振動Irを減じた駆動電流Iiを演算する駆動電流演算手段14と、指令位置Pjと指令速度Vjを演算する指令値演算手段15と、を含んでなる。
(もっと読む)
多重系モータの制御装置及び移動体
【課題】積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供する。
【解決手段】本発明の一形態に係る多重系モータの制御装置は、速度指令と実速度との偏差に基づいて、多重系モータ51の一つの系をそれぞれ制御する、第1の制御系11と第2の制御系21とを備え、第1の制御系11は、多重系モータ51の一つの系をPI制御し、第2の制御系21は、多重系モータ51の他の一つの系をP制御する。これにより、積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供することができる。
(もっと読む)
制御マップ最適化方法
【課題】車両動作制御装置等において用いられる制御マップを、従来に比して精度良く、簡易に最適化可能とする。
【解決手段】2種類の物理量を入力パラメータとし、その2種類の入力パラメータに対して定まる第3の物理量を出力としてなる制御マップは、先の2種類の物理量と、この2種類の物理量に対して定まる第3の物理量は、これら3つ物理量の組合せで一組の制御データをなし、この制御データに対する座標空間として、先の2種類の物理量を、それぞれx軸座標、y軸座標に、先の第3の物理量をz軸座標に、それぞれ配する3次元座標空間を設定し、粒子群最適化アルゴリズムに基づく、z軸座標の座標点に相当する複数のエージェントを、粒子群最適化アルゴリズムに基づいて先の3次元座標空間を探索空間として同時に移動させることによって当該エージェントの座標点の最適解を得て、制御マップの出力値とすることで最適化を図る。
(もっと読む)
直進型及び回転型ロボットの制御装置
【課題】高精度な位置決めが要求される工作機械等において、比較的単純な構造を保ちつつ、迅速かつ高精度な位置決めを実現する直進型及び回転型ロボットの制御装置を提供する。
【解決手段】H無限大制御理論に基づく制御系であって、制御器は数式的に以下の3つの部分に分かれる。1)モータの速度が定常誤差なく追従できるように設計された速度制御器。2)速度制御ループを含めたモータに対して設計されたH∞角度制御器。3)ゲイン可変のフィードフォーワード制御器。制御対象の伝達関数に積分要素が含まれた場合における適切な制御が可能となる。
(もっと読む)
モデリング装置および該方法
【課題】本発明は、先験的知識を利用することによって不充分な入出力データであっても、より精度の高いモデルを構築し得るモデリング装置および該方法を提供する。
【解決手段】本発明のモデリング装置Sは、システムのモデルをそのパラメータの値を決定することで構築する装置であって、前記モデルが、連続した時間と見なされる時間変数を含む数式であり、予め得られているシステムに関する先験的情報を制約条件として設定する制約条件入力設定部21および制約条件記憶部41と、所定の入力データを実績入力データとしてシステムに入力した場合に出力された実績出力データと、前記実績入力データをモデルに入力した場合に出力されたモデル出力データとの誤差を評価する評価関数の評価結果を求める評価演算部13と、前記制約条件を満たし、かつ、前記評価結果が最良となるように、前記モデルのパラメータの値を求めるモデル更新決定部14とを備える。
(もっと読む)
プラント制御装置及び厚板圧延システム
【課題】対象プラントの生産性を低下させることなく、モータの過熱保護による操業停止を確実に防止できるプラント制御装置を提供する。
【解決手段】モータ2を駆動するドライブ装置3と、モータ2の速度基準を生成し、その生成した速度基準をドライブ装置3に送信するコントローラ4とを有するプラント制御装置1において、RMS値計算手段6及び加減速レート調整手段9を備える。RMS値計算手段6は、モータ2のトルク電流の実効値を計算する。加減速レート調整手段9は、RMS値計算手段6によって計算された実効値が所定の規定値を超えている場合に、上記速度基準の加減速レートを調整し、モータ2の過熱保護による操業停止を防止する。
(もっと読む)
モータ駆動装置の位置制御方法
【課題】位置比例積分制御系は、位置偏差の定常偏差を0にする利点があるが、モータ位置が指令位置を追い越すオーバーシュートがおきやすい欠点がある。
【解決手段】位置指令1とモータ位置2の差から位置偏差3を算出し、これに位置比例ゲイン4を乗じた位置比例出力5を計算する位置比例制御系に、速度制御指令8を速度制御モデル15に通したモデル出力16と、モータ位置2を速度検出器13で微分したモータ速度14の差をとり、一次遅れフィルタ17を通した出力を、再び速度制御指令8に加算する速度誤差補正機能を備える。
(もっと読む)
バッチ特性推定のための装置及び方法
【課題】過去の値や現在の状態推定値に基づいて、バッチプロセスの特性を正確に推定することは現在でも困難である。バッチプロセスの特性の推定値を生成する方法を提供する。
【解決手段】バッチプロセスの特性の推定値を生成する方法及び装置は、そのバッチプロセスに関連する複数の反応速度の推定値を生成するために、ノンパラメトリックモデルを使用する。各反応速度の推定値は、例えばバッチプロセスの間の特定の時間に対応している。複数の反応速度の推定値は、次に、その特定の時間でのそのバッチの特性の推定値を生成するために積分される。
(もっと読む)
モータ制御回路
【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な制御ゲインを自動的に設定可能なモータ制御回路を提供する。
【解決手段】本発明に係るモータ制御回路10は、速度検出手段FGから入力される検出信号の周期FG_countと外部から入力される基準信号EXCの周期EXC_countとの差に応じた周期誤差信号を出力する周期誤差信号出力手段20と、周期誤差信号に速度ゲインを乗算して得られる速度誤差信号を出力する速度誤差信号出力手段22と、基準信号EXCの周期EXC_countに対する補正基準周期Ref_countの比を補正量とし、その補正量を2乗して速度誤差信号出力手段22が備える所定の速度ゲインKfに乗算することにより、所定の速度ゲインKfを補正するゲイン補正手段28、30とを備えている。
(もっと読む)
適応ノッチフィルタ、及びノッチフィルタのパラメタ調整方法
【課題】十分な位相余裕が確保されるようにノッチフィルタのノッチ幅を調整する。
【解決手段】適応ノッチフィルタは、ノッチフィルタと、該ノッチフィルタの幅を表すパラメタを調整するパラメタ調整部と、を備える。パラメタ調整部は、パラメタの候補値よりも広い幅を表す値を試行し、検出された振動が試行期間の完了まで基準内に収まっている場合にパラメタを候補値に設定する。検出された振動が基準を超えた場合に試行を中断して前記パラメタを試行前の値に戻してもよい。
(もっと読む)
2自由度制御系のチューニング
【課題】フィードフォーワード制御器とフィードバック制御器から構成される2自由度制御系において主に制御対象の逆モデルから構成されるフィードフォーワード制御器内部のモデルと実際の制御対象との間にモデル誤差が生じた場合の目標値応答性を改善する。
【解決手段】フィードバック制御器4の操作量がゼロ付近となるようにフィードフォーワード制御器3内部のモデルを調整する機構と前記フィードフォーワード制御器内部のモデルとは無関係な外乱などを調整する機構を具備する。
(もっと読む)
1 - 20 / 235
[ Back to top ]