
Fターム[5H004HB20]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | その他 (20)
Fターム[5H004HB20]に分類される特許
1 - 20 / 20
制御装置の設計支援装置および設計支援方法、ならびに制御装置
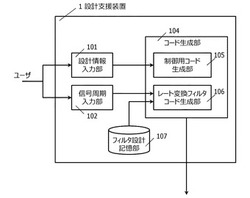
【課題】入力信号間または入出力信号間で信号周期が異なる制御装置を簡易に設計する。
【解決手段】本発明にかかる設計支援装置は、第1センサおよび第2センサからの入力信号に基づいて制御対象へ制御信号を出力する制御装置を設計するための設計支援装置であって、第1センサから入力される第1入力信号の入力周期、第2センサから入力される第2入力信号の入力周期、制御対象への制御信号の出力周期を、ユーザから受け付ける周期入力手段と、制御装置の設計情報をユーザから受け付ける設計情報入力手段と、第1入力信号と第2入力信号の信号周期を制御信号の出力周期にレート変換するフィルタ機能と、レート変換された第1入力信号と第2入力信号を入力として前記設計情報にしたがって制御対象への制御信号を演算するための演算機能と、を含むプログラムコードを出力するコード生成手段と、を備える。
(もっと読む)
外乱抑制荷重制御装置

【課題】リニアモータ併用シリンダから出力される実測荷重値を目標荷重値に良好に追従させて外乱に対する応答性を高めるとともに、リニアモータの発熱を抑えることができる外乱抑制荷重制御装置を提供すること。
【解決手段】リニアモータ併用シリンダ荷重制御部は、リニアモータ併用シリンダの目標荷重値信号と実測荷重値信号の差分信号からエアシリンダ装置の目標荷重値信号に対する追従特性が優れた低周波数帯域を取り出して、この低周波差分信号に基づいてエアシリンダ装置にエアシリンダ装置用最適荷重付加指示信号を送るエアシリンダ装置荷重制御部;及び上記差分信号からリニアモータの目標荷重値信号に対する追従特性が優れた高周波数帯域を取り出して、この高周波差分信号に基づいてリニアモータにリニアモータ用最適荷重付加指示信号を送るリニアモータ荷重制御部;を有する。
(もっと読む)
プロセス制御システム
【課題】制御ノウハウに相当する制御ロジックを自動的に作成すると共に、今制御ロジックがどのように動作するかを確認することができるプロセス制御システムを提供する。
【解決手段】プラント10のプロセスを制御するプロセスコントローラ21に対し、プロセスを制御するための、各種の状態信号や測定値、制御目標値、及び制御量を含むプロセスデータを蓄積するデータ保存部32を設け、この蓄積されたプロセスデータから、プロセスの状態量に対する制御目標値を満足する制御量及び制御結果に関するデータを用い、制御ロジック作成装置31で、これらデータ相互の関係から制御ノウハウに相当する好適な制御ロジックを作成する。作成された制御ロジックは、制御シミュレーション機能33、プロセスシミュレーション機能34を有するシミュレータ35でシミュレートし、検証された制御ロジックがプロセスコントローラ21の制御ロジックとして適用される。
(もっと読む)
学習歩行ロボット装置及びその制御プログラム
【課題】床面の状態が大きく異なりあるいは大きく変化するような領域でも安定した移動を可能とする学習歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】所定領域内のそれぞれの位置における床面の硬さ指標を測定する手段21と、それぞれの位置を表す位置情報と硬さ指標とを対応付けて硬さ情報として保存する手段41と、所定領域内の学習歩行ロボット装置の現在位置を同定する手段35と、同定された現在位置における床面の硬さ指標を硬さ情報から決定する手段36と、決定した床面の硬さ指標に基づいて歩行形態を選択して歩行動作を制御する手段22〜28とを有し、手段21は、学習歩行ロボット装置が直立した姿勢を保持したまま足首の関節ロール軸アクチュエータを駆動したときのアクチュエータに流れる電流値に基づいて、アクチュエータに流れる電流値が大きいほど床面が硬いとする硬さ指標を対応付ける。
(もっと読む)
学習制御システム及び学習制御方法
【課題】自然勾配法を適用した、計算時間の短い強化学習システム及び強化学習方法を提供する。
【解決手段】学習制御システムは、状態Siに対応する行動価値Oiの更新量を求める第1の学習器103と、状態Siをさらに分割した状態Si,jに対応する行動価値Oi,jの更新量を求める第2の学習器105と、第1及び第2の学習器による行動価値の更新量の、行動価値の空間(Oi,Oi,j)における勾配を自然勾配法の勾配へ変換し、更新前の行動価値に加算することによって行動価値を更新する行動価値決定器107とを備えている。
(もっと読む)
プロセス特性変化に対応できる制御方法および制御装置
【課題】塗工機の制御では、塗工量と制御信号との関係が逆転する逆転範囲が時間と共に移動するので、ブレードポジションの制御範囲を、逆転範囲を含まないように狭くせざるを得なかった。また、逆転範囲と制御範囲が重なるとオペレータが手動で操作しなければならなかった。そのための、ブレード交換の頻度が増加し、コストの増大、操業率の低下、オペレータの負担増のない技術を提供する。
【解決手段】現在および過去のプロセス量測定値と制御信号から逆転範囲に入っているかどうかを判定し、逆転範囲に入っていると、通常範囲で用いるゲインとは異なる逆転ゲインを設定し、この設定したゲインと、プロセス量設定値と測定値の差分から制御信号を演算するようにした。また、プロセスの特性を推定し、境界付近にあると制御信号を一時的に大きくして境界付近から脱出させ、この特性が変化するとその変化を補償するように制御信号を変化させるようにした。
(もっと読む)
駆動制御装置
【課題】 駆動機械の過大慣性振動を検出し、この過大慣性振動を抑制して安定な制御系を実現する駆動制御装置を提供する。
【解決手段】 位置指令信号と位置信号を入力とし駆動機械1の速度指令信号を出力する位置制御手段5と、速度指令信号と速度信号を入力としトルク指令信号を出力する速度制御手段6と、駆動機械1を駆動するトルクがトルク指令信号に一致するよう制御するトルク制御手段2と、開ループ周波数応答のゲイン交差周波数が、周波数の増加に伴い開ループ周波数応答の位相が増加するときの位相交差周波数以下となる状態を検出することにより、慣性設定値に対する駆動機械の慣性が大きいことで制御系が不安定となり発生する過大慣性振動を検出する振動検出手段7と、過大慣性振動が検出された場合に速度制御手段6或いは位置制御手段5のゲインを変更することで振動を抑制する振動抑制手段8を備える。
(もっと読む)
道路トンネル換気制御装置及び道路トンネル換気制御方法
【課題】対面通行型トンネルまたは一方通行型トンネルにおいて、火災発生地点からの煙の拡散効果を短時間で確実に抑えることができ、より安全なトンネル環境を維持できるようにする。
【解決手段】トンネル本線上で、火災発生時にトンネル内の風速を低風速化する低風速化演算部と、トンネル本線において、施工後の換気システムの性能評価を行うための性能評価手段と、を備える。この低風速化演算部は、火災発生地点から両坑口に設置された風向風速計の内、どちらを使用するかを判定する制御判定手段と、風向、風速からジェットファンの運転台数及び回転方向を設定するための演算手段からなるジェットファン運転台数・回転方向設定手段とを含み、これら両坑口に設置された風向風速計とトンネル内に設置されたジェットファンを用いて、火災発生地点の風速を制御する。
(もっと読む)
制御パラメータの適合化システム
【課題】事前に目標となる数値を定めることが困難な制御システムにおいても、最適な適合値を自動的に推定する。
【解決手段】エンジン1から排出される排気ガスの各成分量を分析する排気ガス分析計20の出力に基づいてECU10による空燃比制御における目標空燃比の指示値を制御部40で生成し、排気ガス分析計20及びエンジン1のO2センサの出力に基づいて状態評価部30で空燃比の制御状態を評価する。そして、状態評価部30の評価結果に基づいて制御部40で生成した指示値を適合値推定部50で調整して目標空燃比が最適な値となるように適合させ、最終的にECU10に格納される目標空燃比を確定する。これにより、空燃比目標値を予めマップに格納しておく場合等に、開発者の経験が必要なマップ作成作業を自動的且つ効率的に行なうことが可能となり、車両開発時における工数を低減してコスト低減を図ることができる。
(もっと読む)
粘性摩擦同定装置を備えたモータ制御装置
【課題】モータ速度がノイズを多く含む場合にもノイズの粘性摩擦同定精度に与える影響を除去することができ、微小動作のみで粘性摩擦同定をすることができる粘性摩擦同定装置を備えたモータ制御装置を提供する。
【解決手段】入力指令が複数の周波数成分を含む周期信号であって、粘性摩擦同定装置107が、前記入力指令の複数の周波数成分におけるトルク指令と、前記入力指令の複数の周波数成分における前記モータ位置とに基づいて、粘性摩擦同定値を演算するものである。
(もっと読む)
内燃機関の空燃比制御装置
【課題】経年変化によらず内燃機関の運転状態を正確に判定し、判定された運転状態に応じて高精度な制御が可能な内燃機関の空燃比制御装置を提供する。
【解決手段】内燃機関の空燃比制御装置が、実際の燃料噴射量である実燃料噴射量u及びその噴射による空燃比である実空燃比yを保存する記憶手段と、保存された実燃料噴射量u及び実空燃比yに基づいて所定時間経過後の内燃機関の運転状態である先読み運転状態fcを推定する運転状態推定手段と、保存された実燃料噴射量u及び実空燃比y並びに先読み運転状態fcに基づいて前記所定時間経過後の空燃比である先読み空燃比faを推定する空燃比推定手段と、先読み空燃比faに基づいて燃料噴射量を補正する燃料噴射量補正手段とを具備する。
(もっと読む)
浮体と船の相対位置制御方法及び同システム
【課題】洋上プラットフォームの運動に応じてシャトルタンカーを安全領域の中で稼動できるように制御すること等が可能な浮体と船の相対位置制御方法及び同システムを提供すること。
【解決手段】シャトルタンカー1000周りの環境状況を検出する各種センサ200と、環境状況とこの環境状況により船体に働く環境外力の関係を予め算出して蓄えた外力データベース10と、各種センサ200の検出結果と外力データベース10のデータに基づいて船体に働く外力を評価する外力評価手段20と、外力が最少になるように船首方位を最適化する船首方位最適化手段30と、この出力に基づいて少なくとも目標とする浮体構造物2000に対する船首方位を制御するダイナミックポジショニング制御装置500とを備えて構成される。
(もっと読む)
振動機に油圧流体を供給する油圧ユニットのためのサーボ制御システム
【課題】振動機のエネルギー消費を抑制する。
【解決手段】油圧システム7のためのサーボ制御システムは,油圧流体を受ける少なくとも一つの油圧モータによって回転駆動される偏心ウエイトを含む振動機1又は振動システムに,前記流体を供給する,モータ9により駆動されるポンプ8を含む。振動機1により実際に消費されているエネルギーに関連する,油圧ユニット7のモータ9の回転速度の連続的な適応のための適応手段をさらに含む。
(もっと読む)
予測装置、予測方法およびプロセス制御システム
【課題】次回の処理結果の予測精度を向上させ、プロセス状態の急激な変化に迅速に追随させて制御精度を向上させる。
【解決手段】測定値取得部13によって取得された測定値データ保存部11の処理結果の測定値と、予測値データ保存部12の予測値とを用いて、平滑化定数算出部14が指数加重移動平均モデルに適用させる平滑化定数が算出され、リセット判定部15によって測定値データ保存部11のデータの削除が判定されて、データを削除する場合は、リセット部16が測定値データ保存部11の最新の測定値以外のデータを削除し、データを削除しない場合は、予測値算出部17が指数加重移動平均モデルに平滑化定数と測定値とを適用して予測値を算出するようにする。
(もっと読む)
制御システム及び制御方法
【課題】予め設定されている制御に加え、予測に基づく制御を含む知能的な制御を行なうことができる制御システム及び制御方法を提供する。
【解決手段】屋上緑化エリアGへの灌水のための電磁弁13,13を駆動制御対象とし、土中に埋められた湿度センサ14,14で測定される湿度によって開閉を制御するように設定してある開閉装置23に対し、エージェント装置3は、屋上緑化エリアGを含む周辺の気象情報を自律的に取得し、気象情報が天候悪化(降雨の可能性が高い)を示している場合は、電磁弁13,13を開放させないようにする制御値(開放可否を示す制御値)を示す信号を開閉装置23へ送信する。
(もっと読む)
剛性同定装置およびそれを備えたモータ制御装置
【課題】 非剛性パラメータが分からない場合にも、微小動作のみで負荷が低剛性に連結したモータの剛性を高精度に同定することができる剛性同定装置およびそれを備えたモータ制御装置を提供する。
【解決手段】 剛性同定器107が、トルク指令とモータ位置との乗算値である位置トルク指令乗算値を算出する位置トルク指令乗算器108と、モータ位置の振幅であるモータ位置振幅を算出する位置振幅演算器109と、前記位置トルク指令乗算値と前記モータ位置振幅に基づいて剛性同定値を算出して出力する剛性演算器110と、を備える。
(もっと読む)
モータ制御装置
【課題】 慣性モーメントが変動しても安定で、制御性が高いモータ制御装置を提供する。
【解決手段】 位置偏差に比例ゲインを乗算し第1速度指令を生成する比例制御器(6)と、位置指令を微分し第2速度指令を生成する速度フィードフォワード制御器(8)と、速度偏差を比例・積分制御処理をし第1トルク指令を生成する比例積分器(15)と、位置偏差に比例ゲインを乗算し第2トルク指令を生成するトルクFF部(17)と、位置指令に比例ゲインを乗算し第3トルク指令を生成するトルクフィードフォワード制御器(21)と、モータ速度と速度偏差から粘性摩擦を同定する粘性摩擦同定器(20)と、第4トルク指令と粘性摩擦同定値から第5トルク指令を生成する加算器(24)と、第5トルク指令と速度偏差から慣性モーメント同定値を生成する慣性モーメント同定器(26)と、第5トルク指令と慣性モーメント同定値からトルク指令を生成する乗算器(27)とを備えた。
(もっと読む)
モータ制御装置
【課題】 動作が制限される機械系のイナーシャを同定するモータ制御装置を提供する。
【解決手段】 動作に制限条件がある機械を駆動するモータのモータ制御装置であって、速度指令とモ−タ速度によりトルク指令を生成する速度制御部(21)と、前記トルク指令からモータを駆動するモータ駆動部(22)とを備えるモータ制御装置において、イナーシャを同定するイナーシャ同定部(24)と、前記制限条件に基づいて同定指令を生成する同定指令部(25)とを備えた。
(もっと読む)
システム同定装置
【課題】可動範囲の限定された負荷の付いたモータのクーロン摩擦同定ができるようにし、一定トルク外乱が存在する場合にも高精度のクーロン摩擦同定ができるシステム同定装置を提供する。
【解決手段】位置を入力し速度を出力する微分器101と、指令を入力し指令周期を出力する周期検出器103と、前記速度と前記指令周期を入力し複数の積分区間を出力する積分区間検出器102と、前記複数の積分区間と前記指令からフィードバック信号を減算した摩擦慣性トルクを入力し複数のトルク積分値を出力する定積分器104と、前記複数のトルク積分値を入力しクーロン摩擦同定値を出力する演算器105を備える。
(もっと読む)
テクニカルプロセスを安定させる方法
1 - 20 / 20
[ Back to top ]