
Fターム[5H004JA11]の内容
フィードバック制御一般 (10,654) | 設定部 (547) | 設定値が補正されるもの (54)
Fターム[5H004JA11]の下位に属するFターム
検出値を用いるもの (33)
飽和要素を用いるもの (4)
Fターム[5H004JA11]に分類される特許
1 - 17 / 17
制御装置
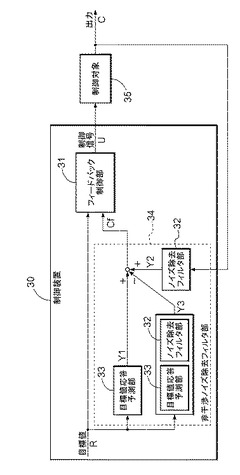
【課題】外乱成分による制御信号の変動を抑制できるとともに、当該制御信号の変動抑制によるフィードバック制御系の応答特性の変動を抑制できる制御装置が求められる。
【解決手段】制御対象の出力が目標値に近づくように制御信号を変化させるフィードバック制御部を備えた制御装置であって、目標値に対して目標値応答予測部の処理を行って第一演算値を算出し、出力に対してノイズ除去フィルタ処理を行って第二演算値を算出し、目標値に対して目標値応答予測部及びノイズ除去フィルタの処理を行って第三演算値を算出し、第二演算値に第一演算値を加算し第三演算値を減算した制御用出力値を算出する処理と数学的に等価な処理を行い、制御用出力値を制御対象の出力として前記フィードバック制御部に入力する制御装置。
(もっと読む)
制御装置

【課題】設定値に応じた適切な目標値と適切なゲイン補正とを通じて制御対象の安定した制御を実現すると共に、目標値の推移を操作員によって容易に設定する。
【解決手段】制御装置128は、所望する設定値に所定の第1伝達関数を施して目標値を生成する目標値生成部140と、目標値から実測値を減算した偏差に所定の第2伝達関数を施して操作量を導出するフィードバック制御機能部142と、偏差に基づくゲイン補正係数を、フィードバック制御機能部の操作量に乗算するゲイン補正機能部144とを備え、第1伝達関数は、ユーザによる操作入力に応じて設定された複数の目標点に基づき、隣接する目標点同士を結線して形成される。
(もっと読む)
発電プラントおよび発電プラント制御装置
【課題】蒸気タービン回転数の変動に基づいてガバナ弁を制御する制御機能の試験を的確に安全に行なう。
【解決手段】発電プラント制御装置は、ガバナ弁位置指令信号14を出力するボイラ・タービン協調制御部40と、調整信号21とガバナ弁位置指令信号14とを加算してガバナ弁指令信号22を出力するガバナ制御部41と、を有する。ガバナ制御部41は、定格周波数と蒸気タービンの回転数の実測データとを比較して偏差信号18を出力する減算器17と、偏差信号18に模擬試験信号を加算して調整基礎信号43を出力する試験信号加算部42と、調整基礎信号43に比例処理を行なって調整信号21を出力する比例器20と、調整信号21にガバナ弁位置指令信号14を加算してガバナ弁指令信号22を出力する協調制御加算器23と、を具備する。
(もっと読む)
制御スケジューリング・システム及び方法
【課題】異なった制御モード間で円滑な変更を行う。
【解決手段】装置の第1の作動モードと第2の作動モードとの間で装置の制御を変更するシステムにおいて、装置を第1の作動モードで制御するための制御信号を生成するための第1の作動モードと関連した利得係数を利用し、且つ装置を第2の作動モードで制御するための制御信号を生成するための第2の作動モードと関連した利得係数を利用する制御ループと、装置が第1の作動モードから第2の作動モードに移行するとほぼ同時に第2の作動モードと関連した利得係数を用いて制御ループを動作させる利得セレクタと、モードの変化中に、制御信号における突然の変化を最小化するスムーザとを備える、システム。
(もっと読む)
位置制御装置
【課題】位置検出にインクリメンタルタイプのパルスエンコーダを使用すると、低速領域ではパルスが発生しなくなるため、低速領域では大きな速度変動が発生する。
【解決手段】位置制御装置のマイナーループに速度制御を持たない位置制御とし、
この位置制御部をPID制御器とし、入力θrefと出力θdet比のPID制御器の伝達関数を次式で求めた後、位置制御部のパラメータKPθ、KIθ、KDθを求めたものである。
θdet/θref=(KDθs2+KPθs+KIθ)/{Jdys3+(KDθ+Ddy)s2+KPθs+KIθ}
(ただし、KPθは比例要素、KIθは積分要素、KDθは微分要素、Jdyはモータ慣性、Ddyは回転損失、sはラプラス演算子)
(もっと読む)
モータ制御装置
【課題】 指令のN階微分値を矩形波とするとともに、その矩形波をN階積分して負荷位置指令とし、制御対象の加速度が制限値を超えないようにした上で、位置決め時間を可能な限り短縮することができるモータ制御装置を提供する。
【解決手段】 制御対象のパラメータに基づく振幅および時間幅を有する矩形波信号PSを生成して出力する矩形波生成部と、矩形波信号PSをN階積分し負荷位置指令信号XLrefを演算して出力するN階積分演算部と、負荷位置指令信号XLrefに基づいて位置指令信号Xrefを生成して出力する最適指令生成部3と、位置指令信号Xrefおよびモータ位置XMに基づいてトルク指令Trefを制御演算するサーボ制御部4とを備える。
(もっと読む)
加減速時のLPTCを使用したショートスパンシーク制御を行う磁気ディスク装置の制御装置および制御方法
【課題】ノミナルモデルが実プラントとモデル化誤差を含む場合に生じる、追従誤差を目標軌道に加え、目標軌道を再設計することにより目標軌道追従誤差を抑圧する学習型完全追従制御法(Learning based PTC:LPTC)を提案する。
【解決手段】マルチレートフィードフォワード制御を行う完全追従制御器と、シーク制御において、出力信号から目標軌道に対する追従誤差を学習し、新たな目標軌道を再設計するための目標軌道補償信号を生成する学習信号発生器とを備える学習型完全追従制御法により制御を行う磁気ディスク装置の制御装置及び制御方法を提供する。
(もっと読む)
サーボ制御装置
【課題】工作機械等に適用するサーボ制御装置において、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制する。
【解決手段】制御回路20,30と電流制御部3とサーボモータ1と送り機構10とテーブル2を含むサーボ制御系Iの周波数特性を測定する。しかも、テーブル2の移動範囲を多数に区分した各区間に対応して周波数特性を測定する。この周波数特性と逆特性となっている逆周波数特性を、各区間毎に求める。そして、実作業時には、テーブル2が位置している区間に対応した逆周波数特性をディジタルフィルタ121に設定する。そうすると、ディジタルフィルタ121とサーボ制御系Iを合わせた伝達関数が1となり、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制することができる。
(もっと読む)
モータ制御装置及び制御方法
【課題】 いかなる条件でサーボシステムが不安定になった場合にも発振して暴走するような危険な状態を回避することができるモータ制御装置及び制御方法を提供する。
【解決手段】 駆動系の発振状態を検出する発振検出部103と、トルク指令urefを予め設定したリミット値TLIMT以下に制限するリミット演算部5と、発振検出部103が発振を検知して発振中であると判断している間のみ、トルク指令urefをリミット演算部5を介して出力する切り替えスイッチ1、及び積分制御器3への入力をオフとする切り替えスイッチ2とを備えた。
(もっと読む)
指令補間方法
【課題】従来の指令補間方法は、制御実施期間が指令更新周期と等しく設定されているので、指令値の入力に遅れが生じた場合に制御停止期間が生じる。
【解決手段】本発明による指令補間方法は、制御周期121に補間値算出数を乗算した制御実施期間120が指令更新周期110よりも長く設定されており、第2指令値102が入力されたときから前記指令更新周期110が経過した際にも、第2指令値102と該第2指令値102の前に入力された第1指令値101とに基づく制御が行われる構成である。
(もっと読む)
石油化学プラントのバルブ制御装置
【課題】制御モード切替操作部によりリモート制御モードとローカル制御モードの何れかに切替操作された場合に、適正なプラントの運転状態を維持することができる石油化学プラントのバルブ制御装置を提供する。
【解決手段】開度センサから入力されるバルブ開度値とバルブに対する制御指令値に基づいてバルブを駆動制御する制御部と、主制御装置から入力される制御指令値に基づいてバルブを駆動制御するリモート制御モードと、手動操作部から入力される制御指令値に基づいてバルブを駆動制御するローカル制御モードの何れかの制御モードに制御部を切替操作可能な制御モード切替操作部と、制御モード切替操作部が切替操作されたときに、手動操作部から入力される制御指令値と、主制御装置から入力される制御指令値との偏差に基づいて、制御モードを切り替えるか否かを判断する制御モード切替制御部を制御部に備えた石油化学プラント制御装置。
(もっと読む)
制御装置及び制御方法
【課題】制御上の無駄時間が生じていたとしても、簡易な構成で、制御を開始してから制御対象を目標値に設定するまでの整定時間を短縮することができる制御装置及び制御方法を提供する。
【解決手段】制御装置は、第1の温度センサ2から検出された第1の値を取得する第1の取得部12と、第1の温度センサ2に比して制御対象物の近くに配置された第2の温度センサ3から検出された第2の値を取得する第2の取得部13と、前記第2の値と予め設定された目標値とを比較した比較結果に応じて、入力値を前記第1の値と前記第2の値とで切り替える切り替え部17と、目標値と入力値の偏差に基づいて前記制御対象物の状態を制御するPID制御部16と、を備える。
(もっと読む)
アクチュエータの角度伝達誤差補償方法
【課題】波動歯車減速機を備えたアクチュエータの角度伝達誤差に含まれている非線形弾性変形成分を効果的に抑制可能な補償方法を提案すること。
【解決手段】波動歯車減速機付きアクチュエータの角度伝達誤差に含まれる非線形弾性変形成分は、モータ軸の回転方向が変化した際に、可撓性外歯歯車の弾性変形により発生する角度伝達誤差の成分であるので、モータを正弦波状に駆動し解析を行うことができる。この解析結果から得られた非線形弾性変形成分モデル(非線形モデル)を用いて、モータ制御装置内にその補償のための関数あるいはデータを記憶させ、非線形弾性変形成分補償(θHys)をフィードフォワード補償用の補償入力(Nθ*TE)として、モータ軸角度指令(θ*M)に加える。この結果、非線形弾性変形成分(θHys)を効果的に低減でき、アクチュエータの位置決め精度を向上させることができる。
(もっと読む)
移動体制御方法及び移動体制御装置
【課題】移動体の制振性能及び位置決め性能の低下を抑制する。
【解決手段】コントローラ5は、所定の駆動パターンで移動体の駆動を制御するためのものであって、移動体の位置又は速度に関する命令値に基づいて移動体のジャークパターンを生成する生成部6と、ジャークパターンを通過させて移動体の位置指令値を出力するフィルタ部7と、を備えている。ここで、コントローラ5では、ジャークパターンをフィルタ部7に通過させて位置指令値を得ることから、位置指令値において共振周波数成分等の振動を励振する周波数成分を低減させることができる。また、コントローラ5では、フィルタ部7の伝達関数から求められた遅れ時間だけジャークパターンを圧縮するように調整して、調整ジャークパターンを生成する。よって、命令値と位置指令値とを時間的に互いに一致させることができる。
(もっと読む)
制御方法、温度制御方法、補正装置、温度調節器、およびプログラム
【課題】操作量が飽和するのを回避して、被処理物を、所望の状態で処理するための調整作業を容易に行えるようにする。
【解決手段】目標温度SPを変化させたときの操作量MV、ウェハの温度WAF、および、熱板の検出温度PVの各変化に基づいて、目標温度SPと操作量MVとの関係を示す第1の行列、および、ウェハの温度WAFと目標温度SPとの関係を示す第2の行列を取得し、第1,第2の行列を用いて、操作量MVを制限した範囲内で、ウェハの面内の温度のばらつきを最小化する目標温度SPの補正値を求めるようにしている。
(もっと読む)
制御方法および制御装置
【課題】過渡状態における相対量の制御性と整定状態における制御の安定性とを両立させる。
【解決手段】特定の状態量を基準状態量とし、基準状態量との相対量が規定値を維持するよう制御される状態量を追従状態量とする。算出部6−1〜6−3は、内部入力値を基準状態量に対する第1の要素と相対量に対する第2の要素との和とし、基準状態量に対する制御演算用入力値の要素を第1の要素とし、相対量に対する制御演算用入力値の要素に係数Biを掛けた値を第2の要素として、追従状態量設定値を内部入力値に変換する。係数Bi切換判断部10は、追従状態量計測値PViが追従状態量設定値SPiから遠いときは係数Biとして第1の値を選択し、設定値SPiから近いときは、計測値PViの基準状態量計測値PVmへの追従性の度合が第1の値よりも弱い第2の値を選択する。
(もっと読む)
駆動装置
【課題】 アクチュエータを構成する駆動コイルを滑らかに動作させることが出来る駆動装置を提供することを目的としている。
【解決手段】 ステップST13で、動作速度定数の累積値ΣΔTを所定値Sで割っているため、ΣΔT/Sが自然数でない有理数や無理数を取ることも可能になる。その結果、本発明では、従来では得られなかった移動速度を得ることが可能になる。所定値Sや移動速度定数ΔTを違う値に設定すれば、また違った移動速度を得ることができ、従来に比べて細かく移動速度の設定を行なうことが可能になる。
(もっと読む)
1 - 17 / 17
[ Back to top ]