
Fターム[5H004JA13]の内容
フィードバック制御一般 (10,654) | 設定部 (547) | 設定値が補正されるもの (54) | 検出値を用いるもの (33) | 他変量の検出値を用いるもの (13)
Fターム[5H004JA13]の下位に属するFターム
比率を設定するもの (4)
Fターム[5H004JA13]に分類される特許
1 - 9 / 9
プラント制御装置及び厚板圧延システム
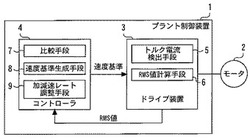
【課題】対象プラントの生産性を低下させることなく、モータの過熱保護による操業停止を確実に防止できるプラント制御装置を提供する。
【解決手段】モータ2を駆動するドライブ装置3と、モータ2の速度基準を生成し、その生成した速度基準をドライブ装置3に送信するコントローラ4とを有するプラント制御装置1において、RMS値計算手段6及び加減速レート調整手段9を備える。RMS値計算手段6は、モータ2のトルク電流の実効値を計算する。加減速レート調整手段9は、RMS値計算手段6によって計算された実効値が所定の規定値を超えている場合に、上記速度基準の加減速レートを調整し、モータ2の過熱保護による操業停止を防止する。
(もっと読む)
省エネルギー余裕算出装置、省エネルギー総余裕算出装置および方法

【課題】マルチループ温度制御系において最遅同調制御を適用することを想定した省エネルギー余裕分を概算で見積もる。
【解決手段】省エネルギー余裕算出装置は、昇温前の操作量MVLを取得する低温時操作量取得部1と、昇温完了後の温度で待機中の操作量MVHを取得する高温時操作量取得部2と、最遅制御ループ以外の制御ループの昇温完了から最遅制御ループの昇温完了までの、最遅制御ループ以外の制御ループの待機時間THを計測する待機時間計測部3と、ヒータ容量に関する情報HPを記憶するヒータ容量記憶部4と、待機時間THとヒータ容量HPと操作量MVHと操作量MVLとから最遅制御ループ以外の制御ループの省エネルギー余裕ESを算出する省エネルギー余裕算出部5とを備えている。
(もっと読む)
外乱補償装置
【課題】モータに作用する負荷トルクの変動だけでなく、前記モータの電機子インダクタンス、直流抵抗(発熱により大きく変動する)および逆起電力定数の影響の変動をも補償できる外乱補償装置を提供する。
【解決手段】モータ3の回転速度を検出する速度センサ11と、モータ3の電機子インダクタンスL、直流抵抗Rおよび逆起電力Eemfがモータ3の回転動作に与える影響を反映させた影響合成信号ω(JLs2+JRs+KtKemf)を、回転速度ωから生成する合成信号生成部13と、影響合成信号に基づいて、前記電力供給指令値Eiを補正する補正部15と、を備える。
(もっと読む)
制御装置および制御方法
【課題】制御量を設定値に近づける特性を完全に犠牲にしてしまうことは避けつつ、過渡状態、整定状態に関係なくエネルギー消費量を抑制する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2との操作量差δMVを算出する操作量差算出部31−1,31−2と、操作量差δMVに基づいて設定値SP1,SP2に対するSP補正量ΔSP1,ΔSP2を算出するSP補正量算出部32−1,32−2とを備える。SP補正量算出部32−1,32−2は、操作量MV1のエネルギー効率が悪い場合にエネルギー効率が良い方向へ変化するようにSP補正量ΔSP1,ΔSP2を算出する。
(もっと読む)
機械制御装置
【課題】 先端に重量物が取り付けられた長尺のアームを移動させる場合でも、振動を伴うこともなく目標位置に停止させる機械制御装置を提供する。
【解決手段】 機械制御装置40には、調節動作の際の比例ゲインが可変構造の位置調節器41を備え、さらに、この機械制御装置40には位置指令ブロック24の出力である位置指令値に基づいて、位置調節器41の比例ゲインを可変する指令を送出する比例ゲイン設定手段42を備えている。
この比例ゲイン設定手段42では、位置指令ブロック24からの位置指令値に基づく移動速度が遅いとき、すなわち、移動距離が短い位置指令値のときには位置調節器41の比例ゲインを大きく設定し、前記位置指令値に基づく前記移動速度が速いとき、すなわち、移動距離が長い位置指令値のときには前記比例ゲインを小さく設定するようにしている。
(もっと読む)
制御装置
【課題】可変バルブリフト装置をPI制御等のI項(積分項)を用いた制御方式で制御する場合に、可変バルブリフト装置の定常時のエネルギ消費量を低減できるようにする。
【解決手段】可変バルブリフト装置が定常状態のときに、目標リフト量を揺らぎ幅Wだけ上り時間Tupで増加させた後に上り時間Tupよりも長い下り時間Tdownで減少させて元の値に戻す処理を周期的に繰り返す揺らぎ制御を実行する。この揺らぎ制御では、目標リフト量の上り時間Tupよりも下り時間Tdownを長くすることで積分項の増加量よりも減少量を多くして積分項を元の値よりも減少させる処理を繰り返すことで積分項を徐々に減少させることができるため、ヒステリシス特性によって制御デューティがエネルギ消費量の大きい方の値になった場合でも、ヒステリシス特性による積分項の増加分を徐々に減少させて、制御デューティをエネルギ消費量の小さい方の値に収束させることができる。
(もっと読む)
倒立移動装置及びその制御方法
【課題】車体の倒立状態を維持したまま、より高い段差を乗り越えることができる倒立移動装置を提供する。
【解決手段】倒立移動装置10は、路面の段差を検出する路面センサ29と、車体20の傾斜角速度θ’を検出するジャイロセンサ28と、車輪12、14の回転角速度を検出するエンコーダ22a、24aと、各センサにより検出された検出値に応じて、コントローラ70がモータ22、24に制御指令値を出力することにより、車体20を倒立状態に維持しながら路面上を走行する。コントローラ70は、路面センサ29により進行方向に段差が検出された場合は、段差を乗り越えるときに車体20を進行方向に対して後ろ側に傾斜させる。
(もっと読む)
制御装置
【課題】 位相遅れやむだ時間などが比較的大きい制御対象を制御する場合において、制御対象の入出力間での制御タイミングのずれの解消、および制御精度の向上をいずれも達成することができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、状態予測器22およびDSMコントローラ24を備える。状態予測器22は、予測アルゴリズムに基づき、出力偏差VO2の予測値PREVO2を所定の算出周期ΔTkで算出し、DSMコントローラ24は、ΣΔ変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、目標空燃比KCMDを、予測値PREVO2の算出周期ΔTkよりも短い算出周期ΔTmで算出する。
(もっと読む)
デジタル速度制御装置、デジタルモータ制御装置、紙搬送装置、デジタル速度制御方法、その方法をコンピュータに実行させるプログラム、コンピュータ読み取り可能な記録媒体、および画像形成装置
【課題】正確な制御が可能なデジタル速度制御装置を提供する。
【解決手段】デジタル速度制御装置10は、搬送ベルト301の変位量を標本化周期に対応する最小単位の変位量の整数倍によって取得する移動距離検出装置500と、標本化時刻に基づいて搬送ベルト301の目標速度を算出する目標速度算出部101と、搬送ベルト301の現在速度を変位量および標本化時刻の差分で算出する現在速度算出部102と、目標速度が所定値よりも小さいか否かを判定する目標速度判定部105と、目標速度は所定値よりも小さく、かつ、現在速度は標本化周期あたり最小単位の変位量であると算出された場合、現在速度を設定値に置き換える速度補正部106と、置き換えた設定値と目標速度との誤差を算出する速度誤差算出部103と、速度誤差に基づいて駆動モータ200を制御する調節計部104と、を備える。
(もっと読む)
1 - 9 / 9
[ Back to top ]