
Fターム[5H004KB06]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | Dの使用 (209)
Fターム[5H004KB06]に分類される特許
1 - 20 / 209
駆動システム及び駆動方法、並びに露光装置及び露光方法
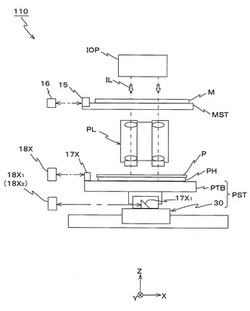
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
PID制御装置

【課題】2系統のPID制御の切替えを可能にしたPID制御装置において、制御対象からの制御量にノイズが含まれていても、切替えを行う際に目標値の変更だけで制御対象でショックが発生しないようにする。
【解決手段】第1PID演算部11で変位の制御量Pv1と目標値Sv1との偏差e1によりPID演算し、演算結果を制御切替え部13に出力する。第2PID演算部12で荷重の制御量Pv2と目標値Sv2との偏差e2によりPID演算し、演算結果を制御切替え部13に出力する。PID演算アルゴリズムの過程で、微分項Dnと比例項Pnを除いた積分項TnのみでMvtの値を演算し、Mvtをメモリに逐次記憶する。切替え時に、Mvtを操作量として制御対象2に出力する。
(もっと読む)
プラント制御装置、プラント制御方法およびプログラム
【課題】複数の操作端毎の位置指令信号値の間に差が生じた場合でも、速度型PID演算部からの自動制御を継続しつつ、複数の操作端毎の位置指令信号値間の偏差を自動的に解消する。
【解決手段】速度型PID演算手段と複数の積分演算手段と複数の上書き手段と自動バランス手段とを持つ。前記速度型PID演算手段は、偏差信号からPID演算を行い、偏差に応じた速度型の操作量指令信号を生成する。前記積分演算手段は、前記操作量指令信号に基づいて各操作端用の規定された操作端位置指令信号を生成する。前記複数の上書き手段は、各操作端用の追加の位置指令信号を生成し、対応する積分演算手段に上書き処理を行って操作端位置指令信号を新たに規定する。前記自動バランス手段は、前記規定された操作端位置指令信号間の偏差を算出し、その算出結果に基づいて前記操作量指令信号を補正し、補正された操作量指令信号を前記積分演算手段に与える。
(もっと読む)
モータ制御装置、及びモータ制御方法
【課題】コアを有するモータを制御する際の位置決め精度を向上させるモータ制御装置、及びモータ制御方法を提供する。
【解決手段】コイルが巻回されたコアを有するモータを制御するモータ制御装置は、前記モータの可動子の位置から電気角を算出する電気角算出部と、前記電気角算出部が算出した電気角に応じた制御ゲインを用いて、前記モータの駆動を制御する制御部とを具備する。
(もっと読む)
制御方法および制御装置
【課題】従来よりも実用性と一般性に優れたB2B制御システムを提供する。
【解決手段】制御装置は、バッチ反応プロセスを制御するPIDコントローラを実現するカスケード制御実行部6と、反応プロセスモデルを記憶するモデル記憶部1と、モデル調整部7と、反応プロセスモデルを線形近似した伝達関数モデルを用いてPIDコントローラのPIDパラメータを調整する制御パラメータ調整部5とを備える。モデル調整部7は、冷媒入口温度Tciの実績データを平滑化して反応プロセスモデルの入力として与え、反応プロセスモデルの出力である反応温度Travの時系列データと反応温度Trの実績データとの2乗誤差を算出し、2乗誤差が最小になる、反応プロセスモデルの適応パラメータを非線形最適化により求め、適応パラメータを用いて反応プロセスモデルのモデルパラメータを調整する。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】ステップ応答制御においてエネルギー使用量が一定値を大幅に超えないように、かつ設定値への追従特性が損なわれないようにする。
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(12)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、使用電力総量が割当総電力を超えない必要出力を各制御ループの操作量出力上限値とする電力抑制部(16〜18)と、昇温時間が最大限度時間以内でない場合に、各制御ループの必要出力を、各制御ループの制御量を最大限度時間の間に設定値変更に応じた量だけ変化させるのに必要な操作量として計算し直し、この必要出力を各制御ループの操作量出力上限値として再設定する補正設定部(21)と、制御部(23−i)とを備える。
(もっと読む)
規範応答演算装置およびそれを用いた車両用制駆動力制御装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用制駆動力制御装置を提供する。
【解決手段】 入力信号uに進み遅れ要素を与えて規範加速度応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいて第1および第2ゲインy1,y2を演算する第1および第2非線形フィルタ17,18と、規範応答ベース値にゲインy1,y2を乗算して規範加速度応答を演算する乗算器19と、を備える。
(もっと読む)
制御装置及び方法
【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】定常状態において電力使用量が一定値を超えないように、かつ外乱抑制特性が可能な限り損なわれないようにする。
【解決手段】電力総和抑制制御装置は、割当総電力の情報を受信する割当総電力入力部(10)と、総電力実測値を取得する総電力実測値入力部(11)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(12)と、使用電力が最大状態に到達していると見なされる状況で総電力実測値が割当総電力より小さい場合に補正係数を大きくする第2の補正係数更新部(13)と、各制御ループの電力余裕が公平な状態に近づくように操作量出力上限値を算出する電力抑制手段(14〜20)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部21と、制御ループ毎に設けられ、操作量を算出して操作量の上限処理を実行する制御部(22−i)を備える。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】ステップ応答制御においてエネルギー使用量が一定値を超えないように、かつ設定値への追従特性が損なわれないようにする。
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(11)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、使用電力総量が割当総電力を超えない必要出力を各制御ループの操作量出力上限値とする電力抑制部(15〜17)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(21)と、総電力実測値が割当総電力より小さい場合に補正係数HSを大きくする第2の補正係数更新部(22)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部(23)と、制御部(24−i)とを備える。
(もっと読む)
制御装置、照射装置及び駆動装置
【課題】複数のモータの制御において、同期の高精度化及び制御の高速化の両立に有利な技術を提供する。
【解決手段】複数のモータのそれぞれについてフィードフォワード制御器を備え、前記複数のモータをそれぞれ制御する制御装置であって、前記フィードフォワード制御器の少なくとも1つは、当該フィードフォワード制御器が制御対象とするモータとは異なる少なくとも1つのモータの入出力特性を表す関数を含む、ことを特徴とする制御装置を提供する。
(もっと読む)
制御装置および方法
【課題】設定値変更時において制御手段とそれ以外の手段との間で行われる信号伝達の頻度を減らしつつ、各制御ループの制御量が設定値に達する時間がほぼ同じになるようにする。
【解決手段】制御装置は、複数の制御ループLiの設定値SPiが変更されたとき、各制御ループLiの操作量出力上限値OHiを規定出力上限値MOiにしたときに各制御ループLiの制御量PViが設定値SPiまで達するのに必要な昇温時間TLを推定する昇温時間推定部1と、昇温時間TLで制御量PViが設定値SPiまで達するのに必要な操作量出力MUiを制御ループLi毎に推定する必要出力推定部2と、操作量出力MUiを各制御ループLiの操作量出力上限値OHiとして一時的に設定する出力上限設定部3と、制御ループLi毎に設けられた制御部5−iとから構成される。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置
【課題】最短時間制御にフィードバック制御の要素を取り入れたアクチュエータの制御方法及びアクチュエータの制御装置を提供する。
【解決手段】最短時間制御を用いると共に、予め、計測されたアクチュエータの制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、制御のための計算を行う計算時刻t0からの経過時間表示で、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出する算出ステップと、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了する制御出力ステップを備えると共に、前記算出ステップを予め設定した時間毎に繰り返して、切替時刻t1と終了時刻t2を算出して更新する更新ステップを備える。
(もっと読む)
作動中のプロセス環境における動的プロセスシミュレーションの更新と利用
【課題】オンライン・プロセスシミュレーションを行う際に該シミューレーション・システムが使い易く且つ更新し易くなる態様でプロセスプラントのプロセス制御環境に統合する。
【解決手段】開示のシミューレーション・システムによると、シミューレーション・システムにより生成されたプロセスパラメータの現在の予測値だけでなく将来的な予測値を、性能評価に利用し、並びにプラントの動作を誘導するために利用することが可能になる。また、該シミューレーション・システムは、プロセスプラントに関する様々なオンライン計測値を受信できるように作動中のプロセスプラントに接続されており、シミューレーション・システムで使用されるプロセスモデルを自動的に更新してシミューレーション・システムをプロセスプラントの実際の作動状態と協調(coordinate)した状態に保つために、これらの計測を使用する。
(もっと読む)
組み込み知能コントローラ、制御システム、制御プログラム、記録媒体、及び制御方法
【課題】インテリジェント・ロバスト制御を実現する組み込み知能コントローラを提供する。
【解決手段】
制御対象の目標軌道誤差の変化に適応的にゲインを可変調整する組み込み知能コントローラ1のICS部10を用いる。ICS部10は、ファジィ・ニューラルネットワークにより非線形誤差を減少させる補償器であるFB−FN部130(ファジィ・ニューラルネットワークによる非線形偏差補償器)を備える。FB−FN部130は、制御対象の非線形動特性のPD(比例、微分)補償を行うファジィPD部131と、制御対象の非線形動特性のPI(比例、積分)補償を行うファジィPI部132とを並列に備える。
(もっと読む)
差し迫った制御不安定性の検出
【課題】対象物に刺激を与えるシステムにおいて、差し迫った制御不安定性を検出してこれを回避する方法を提供する。
【解決手段】システム110は、刺激エフェクター120により対象物100に刺激が与えられている間にセンサー130により対象物の発振を示すシステムパラメータを表すパラメータ信号OSCを測定する。制御装置140はパラメータ信号の選択された周波数帯における支配的なトーンの最大振幅を監視し、最大振幅が指定された期間にわたって持続する場合、制御不安定性を回避する信号CSを刺激エフェクター120に与える。
(もっと読む)
制振制御装置、制振制御方法およびコンピュータプログラム
【課題】リアルタイムに最適な制御ゲインを同定し、操業中に最適なゲインを適用することが可能な制振制御装置を提供する。
【解決手段】連続的に搬送される帯状の金属板の、搬送方向に直交し、かつ板面に略垂直な方向の振動を抑制する制振装置を制御する制御器を有する本発明の制振制御装置は、制御器の制御ゲインを同定して変更する情報処理装置を備える。情報処理装置は、金属板の搬送方向と直交する方向の変位を検出する検出装置により検出された金属板の変位実績値と、制振装置の操作実績値とを取得するデータ取得部と、変位実績値および操作実績値に基づいて、制振装置の制御モデルを用いて制御器の制御ゲインを同定する制御ゲイン同定部と、同定された制御ゲインに基づいて、所定のタイミングで制御器の制御ゲインを変更する制御ゲイン変更部と、を備えることを特徴とする。
(もっと読む)
PIDゲイン調整装置及びPIDゲイン調整方法
【課題】PIDゲインを確実かつ短時間に最適化する。
【解決手段】入出力応答データ取得部21は、線形時不変なプラント1における入出力応答データを取得する。動特性抽出部22は、入出力応答データ取得部21によって取得された入出力応答データを、サンプル周波数ωiを固有角周波数とするそれぞれ異なる複数のバンドパスフィルタFi(s)に通すことにより、複数の異なるサンプル周波数ωi各々に対するプラント1の動特性を抽出する。最適化部23は、プラント1を制御するフィードバック制御系のコントローラ2のPIDゲインに関して凸となる制約条件の下で導出された線形制約式に、動特性抽出部22によって抽出されたサンプル周波数ωiがそれぞれ異なるプラント1の動特性をあてはめることにより、複数の線形制約式を作成し、作成された複数の線形制約式に基づいて線形計画法を用いてPIDゲインの最適値を求める。
(もっと読む)
制御装置
【課題】設定値に応じた適切な目標値と適切なゲイン補正とを通じて制御対象の安定した制御を実現すると共に、目標値の推移を操作員によって容易に設定する。
【解決手段】制御装置128は、所望する設定値に所定の第1伝達関数を施して目標値を生成する目標値生成部140と、目標値から実測値を減算した偏差に所定の第2伝達関数を施して操作量を導出するフィードバック制御機能部142と、偏差に基づくゲイン補正係数を、フィードバック制御機能部の操作量に乗算するゲイン補正機能部144とを備え、第1伝達関数は、ユーザによる操作入力に応じて設定された複数の目標点に基づき、隣接する目標点同士を結線して形成される。
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御器であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる圧力制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体の圧力を測定する圧力センサ3と、前記圧力センサ3で測定される圧力の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御器4と、を備え、前記バルブ制御器4が、入力される値に対して所定の演算を施して前記流体制御バルブ2の開度の操作量に関連する値を演算する操作量演算部41と、入力される値に対してデジタル制御により位相のずれを補償した値を出力する位相補償部42と、を備えた。
(もっと読む)
1 - 20 / 209
[ Back to top ]