
Fターム[5H004KB12]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | 2自由度を有するもの (44)
Fターム[5H004KB12]の下位に属するFターム
目標値からのフィードフォワードを有するもの (25)
ループ補償型
フィードバック補償型(PID−PD等) (4)
目標値フィルタ型 (7)
Fターム[5H004KB12]に分類される特許
1 - 8 / 8
組み込み知能コントローラ、制御システム、制御プログラム、記録媒体、及び制御方法
【課題】インテリジェント・ロバスト制御を実現する組み込み知能コントローラを提供する。
【解決手段】
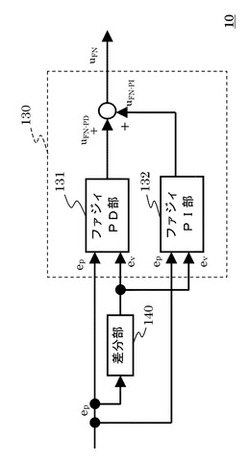
制御対象の目標軌道誤差の変化に適応的にゲインを可変調整する組み込み知能コントローラ1のICS部10を用いる。ICS部10は、ファジィ・ニューラルネットワークにより非線形誤差を減少させる補償器であるFB−FN部130(ファジィ・ニューラルネットワークによる非線形偏差補償器)を備える。FB−FN部130は、制御対象の非線形動特性のPD(比例、微分)補償を行うファジィPD部131と、制御対象の非線形動特性のPI(比例、積分)補償を行うファジィPI部132とを並列に備える。
(もっと読む)
制御装置

【課題】設定値に応じた適切な目標値と適切なゲイン補正とを通じて制御対象の安定した制御を実現すると共に、目標値の推移を操作員によって容易に設定する。
【解決手段】制御装置128は、所望する設定値に所定の第1伝達関数を施して目標値を生成する目標値生成部140と、目標値から実測値を減算した偏差に所定の第2伝達関数を施して操作量を導出するフィードバック制御機能部142と、偏差に基づくゲイン補正係数を、フィードバック制御機能部の操作量に乗算するゲイン補正機能部144とを備え、第1伝達関数は、ユーザによる操作入力に応じて設定された複数の目標点に基づき、隣接する目標点同士を結線して形成される。
(もっと読む)
制御装置及び制御方法
【課題】関節がギア・モータ系で構成されるマニピュレータにおける、完全に測定することができないパラメータ変動を簡易な方法により調整する。
【解決手段】マニピュレータ先端を壁などの固定部に押し当てて、力目標入力fref(N)で押し当てると、ギア・モータだけでなくリンク機構部分のばらつきも含んだ形で力出力fout(N)が出力される。それら2つの値を比較して、R(s)内部の直列ゲインをKrとしたとき、(fout/fref)×Kr=1となるようにKrを設定しR(s)を設計する。制御器内の各関節軸のR(s)すべてに反映させ、パラメータばらつきが原因のfref→foutの制御偏差を0にするように調整する。
(もっと読む)
制御装置
【課題】Δ変調、ΔΣ変調およびΣΔ変調アルゴリズムの1つに基づく制御アルゴリズムにより、制御対象を制御する場合において、制御アルゴリズムへの入力値が正値または負値の一方のみを示すときでも、制御精度を向上させることができる制御装置を提供する。
【解決手段】吸気カム5のカム位相Cainを制御する制御装置1は、ECU2を備える。ECU2は、カム位相Cainを目標カム位相Cain_cmdになるように制御するための参照入力の制限値r1を、式(1)〜(9)で算出し、制限値r1とオフセット値Vcain_oftとの制限値偏差r2を算出し、この制限値偏差r2を、ΔΣ変調アルゴリズムに基づく式(11)〜(13)のアルゴリズムで変調することにより、変調出力u''を算出し、これをゲイン調整したゲイン調整値uにオフセット値Vcain_oftを加算することにより、電磁式カム位相可変機構30への制御入力Vcainを算出する(ステップ5,6)。
(もっと読む)
制御装置、ディスク装置、及びシーク軌道生成方法
【課題】目標位置軌道を供給することのできる二自由度制御系を利用してシーク制御を行い得る制御装置、ディスク装置、及びかかる目標位置軌道を生成するシーク軌道生成方法を提供すること。このような二自由度制御系を構成してもヘッドのシーク時間を早くすることのできる制御装置等を提供すること。
【解決手段】波形生成器312はシーク時間から加速度、速度、位置の各軌道を生成する。各軌道は各々ゲインが乗算され、第1の加算器316で各軌道が合成される。合成軌道にシーク距離が乗算され、更にFIRフィルタ318を通して、後段の二自由度制御系に与えるべき目標位置軌道を得る。二自由度制御系は2次のローパスフィルタで近似可能な特性を持つ。
(もっと読む)
制御装置
【課題】一時的に極めて強い非線形特性を示す制御領域と、非線形特性をほとんど示さない制御領域とが存在するプラントを制御する場合でも、制御の分解能および制御精度を向上させることができる制御装置を提供する。
【解決手段】燃料供給装置10の燃料圧Pfを制御する制御装置1は、ECU2を備える。ECU2は、目標燃料圧Pf_cmdを設定し、燃料圧Pfを目標燃料圧Pf_cmdに収束させるように制御するための第1制御入力Rsldを、式(1)〜(6)により算出し、第1制御入力Rsldを式(11)〜(31)で変調することにより、第2制御入力Udsmを算出し、フューエルカット運転中または減圧制御中であるか否かに応じて、第1制御入力Rsldおよび第2制御入力Udsmの一方を制御入力Upfとして選択する。
(もっと読む)
プラントの制御装置
【課題】複数の制御入力と複数の制御量との間に存在する相互干渉を解消しながら、複数の制御量を制御する場合において、制御性および制御精度を向上させることができるプラントの制御装置を提供する。
【解決手段】制御入力としてのTH_cmd,Liftin_cmdと、制御量としてのPB,Gcylとの間に相互干渉が存在するプラント90の制御装置1は、プラント90を離散時間系モデルとしてモデル化したプラントモデル(式(20))に基づく、所定の応答指定型制御アルゴリズム(式(2)〜(8))と所定の非干渉制御アルゴリズム式(9)とを組み合わせた所定の制御アルゴリズムにより、2つの制御入力TH_cmd,Liftin_cmdを、PB,Gcylを目標値PB_cmd,Gcyl_cmdにそれぞれ追従させるための、相互干渉を解消するような2つの非干渉化入力として算出する。
(もっと読む)
マルチレート制御方法及び装置
【課題】 本発明はマルチレート制御方法及び装置に関し、磁気ディスクの位置決め性能を向上することができるマルチレート制御方法及び装置を提供することを目的としている。
【解決手段】 あるサンプリング周波数で観測した観測量若しくはそれと目標値との差を用いて直接的にサンプル間の制御入力を生成する、連続的若しくは準連続時間のホールド関数付きの1型サーボ制御器生成手段2と、前記ホールド関数を区間毎に定数となる関数で近似する近似手段3と、1型サーボを実現する最適な制御入力を生成するホールド関数生成手段4と、前記2つのホールド関数の合成ホールド関数を生成する第1の生成手段5と、前記合成ホールド関数を任意の時間に任意の時間長だけホールドして制御入力波形を生成する第2の生成手段6とを有して構成される。
(もっと読む)
1 - 8 / 8
[ Back to top ]