
Fターム[5H004KB21]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | 補償要素を用いるもの (61)
Fターム[5H004KB21]の下位に属するFターム
位相遅れ要素の使用 (14)
位相進み要素の使用 (7)
位相進み遅れ要素の使用 (4)
極零点配置を行うもの (8)
ゲインのみの補償 (8)
並列に配置したもの
直列に配置したもの (4)
Fターム[5H004KB21]に分類される特許
1 - 16 / 16
マルチ反対称最適制御性能構成を使用する流量比制御装置を含むガス送出方法及びシステム

【課題】単一の質量流量を多数の流れラインに分割するための流量比制御装置を含むガス送出システム用のマルチ反対称最適(MAO)制御アルゴリズムを開示する。
【解決手段】MAO制御アルゴリズムでは、各流れラインには、流れセンサ124及びバルブ126が設けられている。このバルブは、ターゲット流量比設定点を得るため、線型サチュレータと組み合わせたSISOフィードバック制御装置によって積極的に制御される。最適制御性能のため、これらのSISO制御装置及び線型サチュレータは実質的に同じである。各バルブ制御コマンドは、全ての他のバルブ制御コマンドに対してマルチ反対称であるということがわかっている。従って、MAO制御アルゴリズムは、任意の時期に少なくとも一つのバルブが許容可能な最大開放位置にあり、これによって、流量比設定点の所与の組について、最大総バルブコンダクタンスに関して最適解を提供することを保証する。
(もっと読む)
流体制御装置

【課題】デジタル制御を採用したバルブ制御器であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる圧力制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体の圧力を測定する圧力センサ3と、前記圧力センサ3で測定される圧力の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御器4と、を備え、前記バルブ制御器4が、入力される値に対して所定の演算を施して前記流体制御バルブ2の開度の操作量に関連する値を演算する操作量演算部41と、入力される値に対してデジタル制御により位相のずれを補償した値を出力する位相補償部42と、を備えた。
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御機構であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる流体制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体に関する物理量を測定する流体測定部1と、前記流体測定部で測定される物理量の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御機構4とを備えた流体制御装置100であって、前記バルブ制御機構4が、前記測定値と前記設定値の偏差に基づいてデジタル制御によって前記流体制御バルブ2の開度の操作量を演算する操作量演算部41と、アナログ制御によって位相遅れを補償する位相補償部42と、を備えた。
(もっと読む)
負荷イナーシャ推定方法及び制御パラメータ調整方法
【課題】負荷イナーシャ推定方法及び制御パラメータ調整方法を提供する。
【解決手段】負荷位置制御システムにおいて、フィードバック制御系21による負荷位置制御試験を実施して、特定の負荷位置θLで生じる第1の位置偏差Δθを測定し、負荷位置制御システムのモデルである負荷イナーシャ推定モデル60において、フィードバック制御系モデルによる送り系モデルの負荷位置制御シミュレーションを実施し、このときに前記特定の負荷位置で生じる第2の位置偏差Δθが、前記第1の位置偏差に等しくなるまで、送り系モデルに含まれている負荷イナーシャJLを調整して前記負荷位置制御シミュレーションを繰り返し、その結果、前記第2の位置偏差が、前記第1の位置偏差に等しくなれば、このときの送り系モデルの負荷イナーシャが実機の送り系の負荷イナーシャであると推定する。また、この推定した負荷イナーシャで逆特性モデル50の係数a3〜a5を設定する。
(もっと読む)
駆動装置、画像形成装置
【課題】低コストで適切に駆動手段のフィードフォワード制御を行うことができる駆動装置、及び、その駆動装置を用いた画像形成装置を提供する。
【解決手段】駆動源と、駆動源により駆動される被駆動部と、被駆動部での非周期的な速度変動を検知する速度変動検知手段と、速度変動検知手段により検知された非周期的な速度変動を低減するように予め設定されたフィードフォワード目標値を用いてフィードフォワード制御を行なう駆動制御部とからなる駆動装置において、上記速度変動検知手段により検知される速度変動は所定時間幅と所定振幅とからなる正弦波であり、上記フィードフォワード目標値は、上記所定時間幅と上記所定振幅とから求められる上記正弦波を矩形近似した矩形波とするものである。
(もっと読む)
サーボ制御装置
【課題】機械特性に起因する振動を低減すると共に、往復時の軌跡を一致させるサーボ制御装置を得る。
【解決手段】微分器8は、位置指令信号を微分することにより速度フィードフォワード信号を演算する。演算器10は、微分器8による演算値を微分すると共に駆動対象機械の総イナーシャを乗算する。振動抑制フィルタ41は、演算器10による演算値から機械2の共振周波数成分を減衰し、反共振周波数成分を増幅することによりトルクフィードフォワード信号を演算する。フィードバック補償部5は、位置指令信号と速度フィードフォワード信号とトルクフィードフォワード信号とに基づいて機械2を駆動する。
(もっと読む)
フィードバック制御装置及びフィードバック制御方法
【課題】制御対象の動作状態を検出する状態検出器の精度が悪化しても、制御対象に発生する振動を悪化前と同等のレベルに抑制することが可能なフィードバック制御装置及びフィードバック制御方法を提供する。
【解決手段】フィードバック制御装置100を、レゾルバ信号に基づいて、回転軸の回転位置及び回転速度を算出するレゾルバ信号処理部10と、レゾルバ信号処理部10からの回転速度信号に基づき、フィルタリングを行うか否かを判断する判断部11と、モータの制御信号を生成する制御信号生成部12と、レゾルバ信号処理部10からのフィードバック信号から誤差成分の周期情報を検出する誤差周期検出部13と、回転位置指令信号又はフィードバック信号における誤差成分の周波数を算出する誤差周波数算出部14と、誤差周波数算出部14で算出した周波数に対応するフィルタを用いて制御信号をフィルタリングするフィルタリング部15とを含んだ構成とした。
(もっと読む)
閉ループ制御のチューニングの自動化
本発明は閉ループシステムのためのフィルタとループ比例ゲインを同時選択するための新規な装置、方法およびシステムに関するものである。本発明の1つの典型的な実施形態によれば、速度ループ補償器として知られるコントローラの一部を自動的に選択する方法が提供される。この方法は速度制御(例えばモータエンコーダ角)のフィードバックに使用されるセンサへの作動力(例えばモータトルク)からのダイナミック応答を表す周波数応答関数(FRF)に作用する。この周波数応答関数はそれぞれ対応する周波数値をもつ複素数の列として表すことができる。このチューニング方法は、安定余裕に関して規定された一連の基準を満たしつつループ比例ゲイン(Kp)の最大化を可能にするフィルタパラメータの組み合わせを決定する。積分ゲインと参照モデルを選択する方法も提示される。 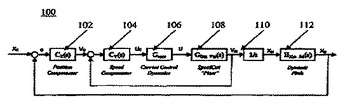 (もっと読む)
(もっと読む)
電動機の制御装置
【課題】状態量指令値に影響されずに機械共振を自動的に抑制すること。
【解決手段】電動機1によって駆動される負荷4の速度を速度指令値に追従させる際に、速度制御手段6の出力信号の機械共振周波数成分を通過させるHPF9と、所定周波数以下の周波数を含む基準信号を出力する基準信号発生器10と、この出力基準信号を手段6の出力信号に加算する加算器11と、この加算出力信号を入力とし、且つフィルタ係数を変化させることにより入出力特性を変更可能な仮想フィルタ12と、この出力信号が前記基準信号に近づくように仮想フィルタ12のフィルタ係数を修正する仮想フィルタ設定部14とを備えて電動機の制御装置を構成する。
(もっと読む)
内燃機関のアクチュエータの位置を特徴付けるパラメータの実際値を調節する方法
【課題】帯域幅、安定性、精度、及び堅牢性に関して制御を最適化することが可能な、アクチュエータの位置を特徴付けるパラメータの実際値を、制御器を用いて目標値に調節する方法が提供する。
【解決手段】アクチュエータ(1)の位置を特徴付けるパラメータの実際値を、制御器(11)を用いて目標値に調節するための方法において、予め定められた目標値の時間的変化が実際値の望ましい時間的変化へと変換される。第一の伝達関数は、周波数範囲の中で予め定められた目標値の時間的変化を実際値の望ましい時間的変化へ変換するために作られ、且つ一つ又は複数の因数、とりわけ遅延要素によって近似される。それ等の因数の少なくとも一つについては、非整数の冪指数が選ばれる。
(もっと読む)
ボイラドラムの水位制御装置
【課題】ボイラドラム水位制御の性能を改善する。
【解決手段】水位制御器43はボイラドラム水位設定値と水位計4からの水位検出値との偏差を演算増幅し、その出力に蒸気流量計5からの蒸気流量値を加え、給水流量計2からの給水流量値を引いて給水調節弁3の開度指令値である操作量を出力する。フィードフォワード補償回路44〜48は、蒸気流量計5からの蒸気流量が入力する、蒸気流量からボイラドラムの水位変動までの動特性を打ち消す伝達関数が設定された補償関数回路44を有し、この補償関数回路44に蒸気流量から水位変動までの動特性を打ち消す伝達関数が設定されているので、水位変動が抑制される。そしてデッドバンド回路45により蒸気流量の変化率が大きく水位の変動が大きい場合に限りフィードフォワード補償回路が作動することになるので、蒸気流量が安定している場合の給水調節弁3の操作量の動作頻度を抑制可能となる。
(もっと読む)
機械特性モデル化装置、電動機制御装置、機械制御システムおよび機械特性モデル化方法
【課題】機械モデル化に誤差が生じないように摩擦を考慮できるようにする。
【解決手段】周波数特性演算装置6と、機械モデル推定手段10と、周波数特性ピーク検出手段11と、減衰推定値解析手段12とを備え、機械特性モデル7には剛体負荷モデル8と摩擦モデル9と、さらに、共振モデル18と反共振モデルと減衰モデル20とを備えた振動系モデル17を備え、最小二乗法もしくは曲線適合により周波数特性から機械モデルを求める。
(もっと読む)
推力リップル補正方法、推力リップル補正装置、位置制御方法および位置制御装置
【課題】 モータの推力を補正することにより、推力リップルに起因する推力の変動を抑制できる推力リップル補正方法等を提供する。
【解決手段】 第1の誤差取得手段101により、第1の仮補正値による補正時における誤差成分を取得する。次に、第2の誤差取得手段101により、第2の仮補正値による補正時における誤差成分を取得する。そして、本補正値算出手段103により、第1の仮補正値による補正時における誤差成分、および第2の仮補正値による補正時における誤差成分に基づいて、推力リップルを補正するための本補正値を算出する。この推力リップル方法によれば、第1の仮補正値による補正時における誤差成分、および第2の仮補正値による補正時における誤差成分に基づいて、推力リップルを補正するための本補正値を算出するので、実際の推力リップルによる誤差成分を本補正値の算出に効果的に反映させることができ、本補正値を高精度に求めることができる。第1の仮補正値はゼロとし、第2の仮補正値を、第1の仮補正値による補正時における誤差成分を補正する値としてもよい。
(もっと読む)
産業用機器制御方法および産業用機器
【課題】ゲイン特性を低下させることのみに依存せず共振ピークが複数ある場合でも速度制御系を安定させた産業用機器制御方法と産業用機器を提供する。
【解決手段】本発明による産業用機器制御方法は、制御対象120を駆動させる駆動部210と、制御対象120または駆動部210の位置情報を検出する検出部220と、制御対象120または駆動部210の動作速度を規定した速度指令を出力する速度指令発生部230と、検出部220から位置情報を入力し速度指令発生部から速度指令を入力し、位置情報および速度指令に基づいて駆動部210を制御する制御処理部240とを備えた産業用機器において、制御対象120の固有振動数に起因する共振周波数における制御処理部240の入出力の位相特性を産業用機器毎に設定することによって該産業用機器を安定化する。産業用機器は本産業用機器制御方法によって調節されている。
(もっと読む)
適応制御装置、その使用、この型式の制御装置を有するセンサ、及びセンサの外乱信号を自動補償する適応方法
本発明は、制御ループと、前記制御ループに配置された比較装置と、前記制御ループの入力値は、前記比較装置に供給され、前記比較装置の下流に接続された評価手段と、その評価手段は、前記比較装置の出力値を結論値に変換し、前記結論値及び前記入力値が供給され、前記比較装置に供給される補正値を発生する補正手段とを備える、センサの外乱信号を自動補償する制御装置に関する。本発明は、さらに、入力値が補正値と比較される、センサの外乱信号を自動補償する方法に関する。本発明は、同様に、本発明による制御装置を備えるセンサ、及びセンサの外乱信号を自動補償するそのような制御装置の使用に関する。 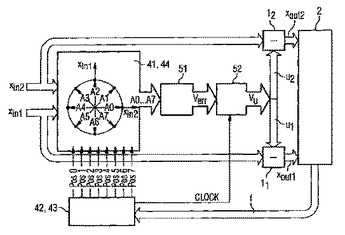 (もっと読む)
(もっと読む)
変調アルゴリズムを用いたプラントの制御装置
【課題】非線形特性の強いプラントに対して十分に非線形特性を補償し、また、制御量の変動が大きいプラントに対しても、追従性、安定性を満たす制御手法を提供する。
【解決手段】本発明は、変調アルゴリズムを用いたプラントの制御装置を提供する。この制御装置は、プラントの出力を目標値に制御するための仮制御入力を算出する手段と、仮制御入力を複数の成分に分割する手段と、複数の成分のうち少なくとも1つを変調する手段と、変調された成分と、他の成分を加算して制御入力を生成する手段と、を有する。これによって、従来の変調アルゴリズムによるプラントのフリクションやヒステリシスなどの非線形特性の補償能力を維持しつつ、変調による入力変動を最小化できる。このため、仮制御入力が大きく変化するようなプラントにおいても、出力が振動的になることを防止でき、制御性が向上する。
(もっと読む)
1 - 16 / 16
[ Back to top ]