
Fターム[5H004KC01]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 最適制御、最適化制御 (306)
Fターム[5H004KC01]の下位に属するFターム
評価基準が明確なもの (146)
特に評価関数 (70)
最適解演算 (55)
最適レギュレータ (13)
H最適制御 (9)
バングバング制御
Fターム[5H004KC01]に分類される特許
1 - 13 / 13
機器相互間の省エネ装置
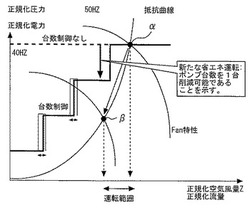
【課題】異なる工業単位のエネルギーを扱う複数機器を共通評価基準にて省エネ評価でき、設備全体としての省エネを図ることのできる機器相互間の省エネ装置を提供する。
【解決手段】それぞれ異なる工業次元のエネルギーを設備に供給する複数の機器を備える。前記複数の機器それぞれに関し、運転量とその運転量に応じて設備に供給するエネルギー量との関係を定めた運転特性について定格を1として正規化し、正規化された運転特性を重畳し、機器相互間の関係を表す重畳正規化データを求める。前記重畳正規化データに基づいて、前記複数の機器のうち1の機器について省エネ制御を実施した場合に他の機器に与える相互干渉度を、最適化手法により計測・分析する。前記相互干渉度に基づいて、前記設備全体としての大局的な最適解を算出する。
(もっと読む)
最適制御システム

【課題】制御対象の行動態様を定める最適解の探索精度向上を図ることができる最適制御システムを提供する。
【解決手段】方策記憶要素120が、状態推定要素110による確率分布p(x)の今回更新結果と、行動探索要素200による条件付き確率分布p(u|x)の今回更新結果とに基づき、同時確率分布p(u,x)の今回更新結果を取得する。一方、行動探索要素200が、状態指定要素110による確率分布p(x)の今回更新結果と、方策記憶要素120による同時確率分布p(u,x)の前回更新結果とに基づき、条件付き確率分布p(u|x)の今回更新結果を取得するための今回基準となる条件付き確率分布p(u|x)を定める。
(もっと読む)
エンジン制御パラメータ適合化装置及びプログラム
【課題】エンジン特性値と制御パラメータの関係モデルに基づき複数の評価項目を十分に満足する準最適解を高速かつ効率的に取得するエンジン制御パラメータ適合装置の提供。
【解決手段】粒子群最適化手法により関係モデル式の評価関数を最小化するように制御パラメータの組み合わせを最適化するにあたり、収束性能改善手段により粒子の状態更新による粒子速度Viの変化量ΔViを監視し、変化量ΔViの各成分Δvijが所定の閾値を下回ったときに、速度成分vijに対して乱数を加えて、粒子を拡散する。これにより、粒子群最適化手法における局所最適解で探索が留まり実用上十分な収束性能を得られないという問題を解決する。
(もっと読む)
最適化シミュレーションプログラムおよび最適化シミュレーション装置
【課題】
目標値と目標値の重みをキーボードから入力する必要が無く、局所解からの脱出を容易にし、パラメーターの入力による計算結果のグラフ表示・グラフの変形による最適化結果のパラメーター表示の双方向オペレーションを可能にする最適化シミュレーション技術を提供する。
【解決手段】
初期パラメーターに基づきプログラムは関数の計算をおこない、計算結果をグラフ表示する。プログラムは、ユーザーがグラフをマウスなどのポインティング装置を用いて所望の形状に近づくように変形させることができる機能を持つ。さらにマウスカーソルがグラフのデーター点を通過した回数に応じて最適化に使用する重みを増やす機能を持つ。プログラムは、変形されたグラフのデーター点を目標値として、最適化手法を用いてパラメーターを最適化する。最適化後のパラメーターを初期パラメーターとして上記手順を繰り返し、所望の目標値に近づけていく。
(もっと読む)
制御装置のための機能パラメータを定める方法
本発明は、制御装置(22)のための機能パラメータ(20)を定める方法と、提示される方法が実施される制御装置(22)と、に関する。制御装置(22)は、技術システム(10)の制御のために設けられ、本方法では、少なくとも1つの目標変数がシステム挙動に対して予め設定され、機能パラメータ(20)の変更が実行され、機能パラメータ(20)に対する獲得された応答から、設定されたパラメータ(20)の評価が、予め設定された少なくとも1つの目標変数を考慮して実行される。 (もっと読む)
多段プロセスとその制御
多段プロセスを制御する方法を提供する。本プロセスは、原料から中間製品を生成する複数の第1段階プロセスと中間製品から最終製品を生成する複数の別段階プロセスとを含む。第1段階プロセスは複数の中間プロセスを含み、別段階プロセスは最終製品を生成する複数の最終プロセスを含む。中間制御装置は最終製品EPの1つまたは複数の製品特性に応じて第1段階プロセスを制御し、別の制御装置FCは中間製品の製品特性に応じて別段階プロセスを制御する。多段プロセスは、最終プロセスと中間プロセスのそれぞれにプロセス値を割り当てる工程を更に含む。中間制御装置ICは、最終製品を生成するための全体プロセス値を最適化するように中間プロセスの動作を制御する。最終制御装置FCは全体プロセス値を最適化するように中間制御装置ICの動作に応答する。 (もっと読む)
化学的エンジニアリング工程を制御する明確なスイッチを有する二自由度制御方法
本発明は、プロセスエンジニアリング工程の閉ループ制御を実行する方法に関し、目標値の軌跡が閉ループ制御変数に提供され、プロセスの閉ループ制御変数及び更なる状態変数が検出され、制御誤差及びこれに基づく閉ループ制御操作変数が制御アルゴリズムによって算出され、加えてパイロット制御操作変数が決定され、生成操作変数が、閉ループ制御操作変数及びパイロット制御操作変数から算出され、プロセス中に設定される。制御アルゴリズム及びまたはパイロット制御の構造は、閉ループ制御変数、更なる状態変数及び/または目標値の軌跡の関数として変更される。更に、本発明は、閉ループ制御装置及び本方法を実行するコンピュータプログラムに関する。 (もっと読む)
フィードバック制御ゲインの設定方法及び設定支援プログラム
【課題】非反証制御の考え方をオフラインでの制御系設計に適用し、制御ゲインの最適値を計算によって求め得るようにして、設定の容易化を図るとともに、多入力多出力系にも適用可能な画期的な方法を提供する。
【解決手段】制御対象(プラント)Pにステップ入力等を加えたときの入出力応答データを少なくとも1つ採取する(ステップS1)。このデータに基づいて所定数以上の仮想の入出力応答データを生成し(S2,S3)、これらをそれぞれ反証演算式に代入してパラメータ空間に所定数以上の非反証領域を規定する(S4)。反証演算式を線形制約式とすることで、所定数以上の非反証領域の積集合の領域において制御ゲインの最適値を計算により求めることができ(S5)、多入力多出力系にも適用可能になる。
(もっと読む)
ニューラルネットワークを用いてコンピュータ支援によって閉ループ制御および/または開ループ制御を行う方法
本発明は、コンピュータ支援によって技術システムを閉ループ制御および/または開ループ制御する方法に関する。この方法では、強化された学習方法および人工ニューラルネットワークが使用される。ここではフィードフォワードネットワークを互いに結合して、上記のアーキテクチャが最適性判定基準を満たすようにする。ここで上記のネットワークは、観察される報酬を推定値として、予想される報酬に近似する。これによって、実際に行われる観察だけが最適に利用されて、品質関数が決定される。上記のネットワークにおいて、上記の品質関数についての最適なアクションがニューラルネットワークによってモデル化され、この学習されたニューラルネットワークにより、与えられた制御問題に対する最適なアクション選択ルールが得られる。本発明は、閉ループ制御ないしは開ループ制御を行うために任意の技術システムに使用することができ、好適な適用分野は、タービン、殊にガスタービンの閉ループ制御ないしは開ループ制御である。本発明のさらなる利点は、これが、連続的なアクションを有する制御方法に使用できることである。 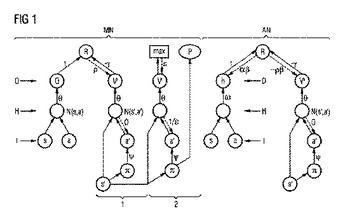 (もっと読む)
(もっと読む)
対象の数に合わせた最適制御システム、無線端末、制御機器
【課題】 室内の人数も加味して空調の制御を行う等、複数の対象の数に合わせた管理対象の最適な制御を行い得る最適制御システムを提供する。
【解決手段】 エリア1乃至nのそれぞれに配設した管理対象11乃至1nと、複数の検出対象のそれぞれに一対一に対応させて帰属させるとともにそれぞれが所定の端末信号を無線で送出する無線端末31乃至35と、エリア1乃至nのそれぞれに配設するとともに、端末信号を受信して受信した無線端末31乃至35の数を表す情報を少なくとも含む受信信号を送出する受信端末21乃至2nと、各受信信号を受信して処理し、各エリア1乃至n毎の無線端末31乃至35の数に基づく要素を少なくとも加味して各管理対象11乃至1nの所定の制御を行う管理サーバ51とを有する。
(もっと読む)
O2コントローラ
本発明は、人工呼吸器のPEEPとFiO2を制御して、機械的に換気される患者の血液中における動脈血酸素分圧を実現するための装置に関するものである。酸素供給の成功を表す示度、すなわち、血液の酸素飽和度がこの装置によって測定され、2つの特性線によって形成される3つの領域の1つに割り当てられる。第1の制御ループは、設定の変更を要求する領域に示度を割り当てる場合にPEEPとFiO2を最適化するか、あるいは、特性線間の正常領域に割り当てる場合に設定をそのままにしておくように設計されている。この第1の制御ループは、表示示度(SaO2REP)及び所定の必要な供給強度に対して所定の時間間隔でこうした最適化を実施する。その後、人工呼吸器がそれに応じて作動させられる。その間に、必要があれば、すなわち、第1の制御ループによる最適化操作の間に、現在の表示示度(SaO2REP)が、酸素供給の即時増大を要する供給強度によって決まる限界値(特性線)未満になると、FiO2だけが第2の制御ループによって増減させられる。 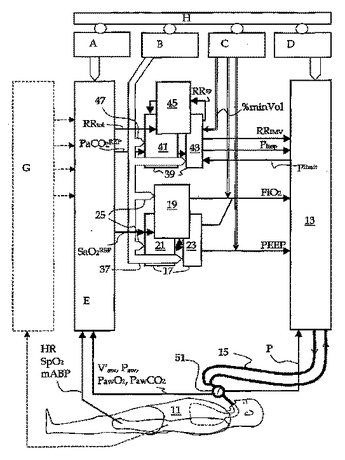 (もっと読む)
(もっと読む)
機械の移動可能な機械要素の運動案内方法
本発明は、制御装置(8)において動作する次のステップ、すなわち、a)機械要素(9)によって実行されるべき移動運動(XV)および最適化基準(OpK)が入力されるステップ、b)運動特性(Xsollk(t))が機械要素(9)によって実行されるべき移動運動および最適化基準(OpK)に基づいて決定されるステップ、c)位置目標量(Xsoll(n))が運動特性(Xsollk(t))により決定されるステップ、d)機械要素(9)の移動運動を実行するために調節部(6)に位置目標量(Xsoll(n))が出力されるステップを有する機械の移動可能な機械要素(9)の運動案内方法および制御装置(8)に関する。本発明は、使用者が直接に運動案内の最適化に影響を及ぼすことのできる機械の移動可能な機械要素の最適化された運動案内のための簡単な方法および簡単な制御装置を提供する。 (もっと読む)
駆動制御系設計支援装置、駆動制御系設計支援プログラム、駆動機構設計支援装置、駆動機構設計支援プログラム及び記録媒体
【課題】本発明は、駆動機構を動作させるアクチュエータを駆動制御する駆動制御系と当該駆動機構の開発支援を行う駆動制御系設計支援装置、駆動制御系設計支援プログラム、駆動機構設計支援装置、駆動機構設計支援プログラム及び記録媒体に関する。
【解決手段】駆動制御系設計支援装置1は、オフラインシミュレーション部10で、制御系MCU80の設計情報に基づいて制御系MCU80をオフライン駆動制御系モデルとしてモデル化して、当該オフライン駆動制御系モデルを用いてオフラインでシミュレートし、リアルタイムシミュレーション部20で、オフライン駆動制御系モデルをリアルタイムマシンに実装して、制御対象の読取駆動機構系90をリアルタイムでシミュレートする。そして、最適化計算部40が、リアルタイムシミュレーション部20でシミュレートするオフライン駆動制御系モデルの各パラメータをリアルタイムで最適化する。
(もっと読む)
1 - 13 / 13
[ Back to top ]