
Fターム[5H004KC21]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 予測制御 (384)
Fターム[5H004KC21]の下位に属するFターム
プラントの特性を予測するもの (47)
負荷、需要を予測するもの (28)
制御量を予測するもの (61)
過去のデータを用いるもの (45)
モデルを用いるもの (198)
Fターム[5H004KC21]に分類される特許
1 - 5 / 5
ネットワーク型制御システム、およびネットワーク型制御システムにおける通信遅延時間制御方法
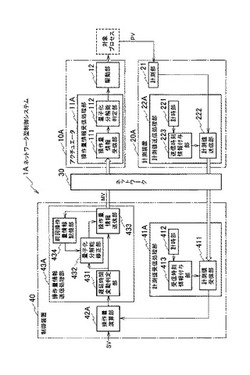
【課題】通信遅延時間の変動を抑制しながら制御性能を維持してフィードバック制御によるプロセス管理を実行することが可能なネットワーク型制御システム、およびネットワーク型制御システムにおける通信遅延時間制御方法を提供する。
【解決手段】ネットワーク型制御システムは、管理対象プロセスの状態を制御する制御対象機器と、対象プロセスの状態量を計測する計測装置20Aと、制御対象機器および計測装置20Aにネットワーク30を介して接続され、計測装置20Aによる管理対象プロセスの状態量の計測値に基づいて制御対象機器をフィードバック制御する制御装置40とを有する。このネットワーク型制御システムは、ネットワークにおける通信遅延時間を演算する手段と、通信遅延時間が所定値以上になったときに、前記フィードバック制御を行うために前記ネットワークに送出する情報量を低減させる手段とを備える。
(もっと読む)
インバータシステムの無駄時間補償装置

【課題】制御対象に非線形要素を含んでいても、直接制御対象モデルに組み込んでスミス予測器を具備した無駄時間補償装置及びその方法を提供する。
【解決手段】無駄時間を有する制御対象として、当該制御対象におけるフィードバック制御系の安定性を保つための無駄時間補償装置であって、非線形要素を含む制御対象G(s)e-sLと同じ応答特性を有するモデル回路P(s)を、オペアンプ回路によるアナログ計算機、又はFPGA回路のハードウエア回路で実装したスミス予測器を具備し、前記モデル回路P(s)に、前記制御対象と同じ信号を入力して出力信号を取得し、前記取得した出力信号をフィードバック制御系に負帰還させ、さらに前記取得した出力信号を、前記制御対象と同じ無駄時間要素e-sLに入力し、前記入力した無駄時間要素e-sLの出力信号と前記制御対象の出力信号の差分信号を、フィードバック制御系に負帰還させている。
(もっと読む)
制御装置および制御方法
【課題】測定が困難な実体物の制御量の代わりに、実体物に関係する計測点の制御量を測定して制御する場合に、実体物の制御量の設定値への追従速度を向上させる。
【解決手段】制御装置は、昇温開始点POと昇温幅PHと操作量維持値MHとからなるオンラインデータから維持時間TXを推定する推定用多項式を記憶する推定用多項式記憶部1と、推定用多項式を用い、入力されたオンラインデータから維持時間TXを推定する維持時間TX推定値算出部4と、昇温開始時点から維持時間TXが経過するまでの初期制御期間において、操作量維持値MHを目標として操作量MVを出力する操作量維持制御部5とを備える。
(もっと読む)
車両の駆動力制御装置
【課題】未来の運転者操作量(換言すれば運転負担)と未来の燃料消費量を予測し、状況の変化に応じてそれらを同時に最小化あるいは最適化することを可能とするようにした車両の駆動力制御装置を提供する。
【解決手段】エンジンでフューエルカットが実行されるときと否とに分けてモデリングされると共に、状態方程式で記述された、エンジンから車体までを制御対象として変速比とエンジン回転数を車速に基づいて算出される代表目標変速比と燃費最適作動線に従って算出される目標エンジン回転数にフィードバック制御する変速比制御系とを備え、アクセルペダル開度とブレーキペダル開度の現時刻からnステップ未来までの運転者操作量の総和を評価する運転者操作量評価関数などに従って状態xの変化が最適となるように予めオフラインで生成された最適解群を検索して代表変速比を修正し、操作量として制御対象に加える。
(もっと読む)
幅方向位置対応関係同定方法およびそれを用いたシート状製品製造装置
【課題】 銘柄毎に操作端と測定点の位置対応関係を測定して切り換えていたが手間がかかり、また操業中に位置対応関係がずれるとステップ応答を測定して再度位置対応関係を測定しなければならず、品質管理上問題があった。
【解決手段】 操作端の操作量をプロセスモデルに入力し、このプロセスモデルと測定プロファイルの偏差が最小になるようにプロセスモデルの位置対応関係、干渉幅、プロセスゲインを修正し、またこの位置対応関係を、操作量を出力する幅方向制御器に設定するようにした。操業中に逐次位置対応関係を最適値に修正できるので、位置対応関係がずれても制御性が悪化することがなくなり、かつ銘柄毎に位置対応関係を測定して切り換える手間がなくなる。
(もっと読む)
1 - 5 / 5
[ Back to top ]