
Fターム[5H004KC24]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 予測制御 (384) | 制御量を予測するもの (61)
Fターム[5H004KC24]に分類される特許
1 - 20 / 61
ポンプ運転計画装置
センサ情報の統合方法と装置
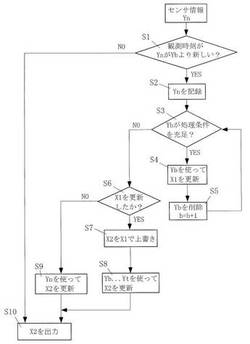
【課題】誤差と計算量を増大させずに複数のセンサ情報を統合することができる方法と装置を提供する。
【解決手段】新たに受信したセンサ情報Ynを、観測時刻の順に記録し、各センサ情報に対し、第1条件を満たすか否かを判定する(S3)。第1条件は、「そのセンサ情報の観測時刻と同じかそれよりも新しいセンサ情報がすべてのセンサから受信されていること」である。第1条件を満たす場合に、第1条件を満たす各センサ情報6を観測時刻順に用いて、内部状態を予測し、第1推定値X1を予測した内部状態に更新して記憶し、第2推定値X2を更新した第1推定値X1で上書きし、更新に用いたセンサ情報を削除する(S4,S5,S7,S8)。第1条件を満たさない場合に、新たに受信したセンサ情報Ynを用いて、内部状態を予測し、第2推定値X2を予測した内部状態に更新して記憶する(S9)第2推定値X2を対象物の内部状態として出力する(S10)。
(もっと読む)
制御装置および方法

【課題】瞬間総エネルギーが一定値を超えないように、かつ温度のオーバーシュートの発生を抑制できる確率が高くなるようにする。
【解決手段】制御装置は、各制御ループLiの昇温電力量PWiを予測する昇温電力量予測部3と、昇温電力量PWiが大きい方から小さい方への順序を各制御ループLiの昇温実行順序として決定する昇温実行順序決定部4と、最初の昇温開始のとき、あるいは昇温対象の制御ループの昇温が進むことにより操作量が下降して電力余裕が生じたと判断されるときに、昇温実行順序に従って昇温対象の制御ループを選択する昇温対象選択部5と、各制御ループLiのヒータに供給する電力の制限操作を行なう電力制限操作部6と、制御ループLi毎に設けられた制御部7−iとから構成される。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】ステップ応答制御においてエネルギー使用量が一定値を超えないように、かつ設定値への追従特性が損なわれないようにする。
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(11)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、使用電力総量が割当総電力を超えない必要出力を各制御ループの操作量出力上限値とする電力抑制部(15〜17)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(21)と、総電力実測値が割当総電力より小さい場合に補正係数HSを大きくする第2の補正係数更新部(22)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部(23)と、制御部(24−i)とを備える。
(もっと読む)
制御装置および方法
【課題】設定値変更時において制御手段とそれ以外の手段との間で行われる信号伝達の頻度を減らしつつ、各制御ループの制御量が設定値に達する時間がほぼ同じになるようにする。
【解決手段】制御装置は、複数の制御ループLiの設定値SPiが変更されたとき、各制御ループLiの操作量出力上限値OHiを規定出力上限値MOiにしたときに各制御ループLiの制御量PViが設定値SPiまで達するのに必要な昇温時間TLを推定する昇温時間推定部1と、昇温時間TLで制御量PViが設定値SPiまで達するのに必要な操作量出力MUiを制御ループLi毎に推定する必要出力推定部2と、操作量出力MUiを各制御ループLiの操作量出力上限値OHiとして一時的に設定する出力上限設定部3と、制御ループLi毎に設けられた制御部5−iとから構成される。
(もっと読む)
気相成長装置、気相成長装置の温度制御方法および温度制御プログラム
【課題】 被処理物の温度を推定し、装置内の各種状態に影響を受けない温度制御を行う。
【解決手段】 被処理物を加熱する加熱手段と、加熱手段の温度を検出する第1検出手段を有する気相成長装置であって、気相成長装置は、当該気相成長装置の状態を検出する第2検出手段と、第1検出手段で検出された温度と、第2検出手段で検出された状態に基づいて、被処理物の表面温度を推定する温度推定手段と、温度推定手段で推定した表面温度を、予め定められた目標温度になるよう加熱手段を制御する温度制御手段によって解決する。
(もっと読む)
制御装置
【課題】外乱成分による制御信号の変動を抑制できるとともに、当該制御信号の変動抑制によるフィードバック制御系の応答特性の変動を抑制できる制御装置が求められる。
【解決手段】制御対象の出力が目標値に近づくように制御信号を変化させるフィードバック制御部を備えた制御装置であって、目標値に対して目標値応答予測部の処理を行って第一演算値を算出し、出力に対してノイズ除去フィルタ処理を行って第二演算値を算出し、目標値に対して目標値応答予測部及びノイズ除去フィルタの処理を行って第三演算値を算出し、第二演算値に第一演算値を加算し第三演算値を減算した制御用出力値を算出する処理と数学的に等価な処理を行い、制御用出力値を制御対象の出力として前記フィードバック制御部に入力する制御装置。
(もっと読む)
プロセス制御の操作量プリセット方法
【課題】数式モデルによる予測と過去データとの類似性に応じた予測を切替えて使用する場合であっても、制御応答に急激な変化のない、安定した操作量設定を行うことができるプロセス制御の操作量プリセット方法を提供することを課題とする。
【解決手段】対象プロセスを表す数式モデルの入・出力値、および出力値と対象プロセスの実績値との誤差を収集するデータ収集ステップと、複数のデータを逐次蓄積するデータ蓄積ステップと、制御しようとする操業条件に対応した入力値と類似した入力値を有するデータを蓄積したデータ群から抽出したデータを用いて、前記数式モデルの出力誤差を予測する数式モデル誤差予測ステップと、前記数式モデルの出力誤差を加算あるいは乗算して、制御量の予測値とする制御量予測ステップと、前記制御量の予測値が所望の制御量と一致するように操作量を決定する操作量決定ステップとを有する。
(もっと読む)
制御装置
【課題】むだ時間や応答遅れが変化する特性を備えた制御対象を制御する場合において、制御精度を向上させることができる制御装置を提供する。
【解決手段】制御装置1のECU2は、4個のむだ時間dがそれぞれ経過したタイミングでの制御量として、4個の予測値PRE_KACT_4-iを算出し、排ガスボリュームVexに対応する4個の重み関数値Wdiを算出し、重み関数値Wdiを予測値PRE_KACT_4-iにそれぞれ乗算することにより、4個の乗算値Wdi・PRE_KACT_4-iを算出し、4個の乗算値Wdi・PRE_KACT_4-iの総和を予測当量比PRE_KACTとして設定し、予測当量比PRE_KACTが目標当量比KCMDになるように、空燃比補正係数KAFを算出する。
(もっと読む)
バッチプロセスを制御するためのシステムおよび方法
【課題】バッチプロセスを制御するためのシステムおよび方法が提供される。
【解決手段】バッチプロセスをシミュレートするために、第1原理モデルが用いられ、この第1原理モデルは、バッチプロセスを制御するために、多重入力/多重出力制御ルーチンを構成するのに用いられ得る。第1原理モデルは、実際のバッチプロセスの動作の間に測定することができず、または測定されないバッチ変数の推定値を発生することができる。このような変数の例としては、バッチプロセスの構成成分(例えば、生成速度、細胞成長速度等)の変化速度であってもよい。第1原理モデルおよびその構成された多重入力/多重出力制御ルーチンは、バッチプロセスの制御を容易にするために用いられ得る。
(もっと読む)
制御装置、電子制御ユニット、異常検出方法
【課題】ECUに搭載されたCPUと、ECUに供給される入力データの供給元の異常を判別できる制御装置を提供すること。
【解決手段】 第1のデータを出力し、前記第1のデータの後、第2のデータを出力するデータ出力手段22と、第1のデータから前記第2のデータを予測して予測データとして出力するデータ予測手段16と、第2のデータに演算を行う第1の演算手段Aと、前記予測データに演算を行う第2の演算手段Bと、前記第1の演算手段が前記第2のデータに演算を施した第1の出力値と、前記第2の演算手段が前記予測データに演算を施した第2の出力値と、を比較する比較手段17と、を有することを特徴とする制御装置100を提供する。
(もっと読む)
電気エネルギーを生成する風力発電機を制御する方法
制御システム
【課題】非干渉化器を作動させた状態で、実運転させて昇温させた場合に、制御対象の温度が低い領域では干渉を見越して操作量を少なくするようにフィードバックが作用するので、投入熱量が抑制されてしまう。その結果、実運転開始から目標温度までの昇温に時間がかかるため、昇温までの時間の短縮化を図る。
【解決手段】複数の制御手段と制御対象との間に、各制御量において、一方の制御量が他方の制御量に与える影響をなくすか低減するように処理する非干渉化手段を備え、非干渉化手段として、補償要素3bと減算器3dとの間の減算器側ラインおよび補償要素3bと加算器3cとの間の加算器側ラインに、補償要素3bからのフィードバック量を可変するフィードバック量可変手段3h3,3h4を備えた。
(もっと読む)
モデル予測制御装置およびプログラム
【課題】制御量を目標値とする、という目標に加えて、制御量を目標値以下若しくは以上とする、または、制御量を極力小さくするという目標を同時に実現する。
【解決手段】プロセスモデルに基づいて、被制御量の変化を予測し、操作量を変化させるモデル予測制御装置10であって、被制御量の予測式を用いて、被制御量の変化の予測値を算出する予測部11と、算出した予測値および目標値からの被制御量の超過分を示す変数または目標値からの被制御量の不足分を示す変数の少なくとも一方を含む評価関数を用いて、被制御量が目標値以下となるように、操作量を決定し、被制御量が目標値以上となるように、操作量を決定し、被制御量が目標値となるように、操作量を決定し、被制御量が最小化するように、操作量を決定し、または、被制御量が最大化するように、操作量を決定する操作量決定部12と、を備える。
(もっと読む)
起動装置および起動方法
【課題】工業炉などの産業用の製造装置に適した制御の再起動を実現する。
【解決手段】起動装置1は、降温速度ΔPVと休止時間TWと操作量上限値OHとオフ時間TXとの組からなる分析用データを記憶する分析用データ記憶部2と、分析用データを用いて多変量解析手法により推定用多項式を算出する推定用多項式算出部3と、推定用多項式を記憶する推定用多項式記憶部4と、降温速度ΔPVと休止時間TWと操作量上限値OHのオンラインデータを取り込んでオフ時間TXの推定値を算出するオフ時間TX推定値算出部5と、制御装置10に対してヒータをオフにさせる指令を与え、オフ時間TX推定値の時間だけ維持した後に、通常の制御を再起動させる動作指令部6とを備えている。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】本発明の目的は、統計モデルを構築する際に用いるデータに偏りが存在する学習型のプラントを制御する場合でも、高精度な統計モデルを構築して所望の制御効果を獲得可能なプラントの制御装置を提供する。
【解決手段】本発明のプラントの制御装置は、プラントに制御信号を与えた時に取得する計測信号の値を推定する統計モデルと、前記統計モデルの構築に用いるデータを保存するモデル構築データベースと、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する操作方法学習部と、前記モデル構築データベースに保存される情報に含まれる統計モデルの半径パラメータを調整するモデル調整部とを備え、前記統計モデルは前記モデル調整部による半径パラメータの調整結果を用いてモデル出力を生成するように構成する。
(もっと読む)
プラント運転制御装置
【課題】短い制御周期で運転操作量を算出するプラント制御装置を提供する。
【解決手段】プラントのプロセスを模擬した非線形モデルにより、流入量及び流入水質の履歴及び運転操作量の履歴から現在のプラント状態量を推定し、推定された状態量近傍で非線形モデルを線形化し、入力制約条件,出力制約条件及び最小化制約条件とを設定する制約条件設定手段と、流入水の流入量及び流入水質,制約条件に基づいて線形モデルを用いて運転機器の運転操作量を算出する運転操作量算出手段と、線形モデルにより算出された処理水質と、計測された処理水質との誤差である線形誤差が、線形許容誤差を超過した場合は、プラント状態量推定手段及び線形モデル作成手段により線形モデルを作成する線形モデル検証手段とを備えた。
(もっと読む)
プラント制御システムおよび制御方法
【課題】同定波形採取のための同定実験を行わず、プラントの立ち上げデータを用いてプラントの同定、及び、制御パラメータの調整を実現可能とするプラント制御システムを提供する。
【解決手段】システム支援ツール100は、制御装置200内の各部(MPC制御部210,PID制御部220)および制御対象230の起動制御を行って各部を起動する。各部を起動することで、制御量(PV),操作量(MV),設定値(SV)に関する各ゾーン毎のデータを、システム支援ツール100のデータロギング機能を用いて採取する。システム支援ツール100は、立ち上げデータを元に同定機能を用いて、プラントのモデルパラメータを推定する。そして制御パラメータ調整機能を用いて、モデル予測制御(MPC)部210及びPID制御部220に係る制御パラメータを同定結果のモデルパラメータを使って計算する。
(もっと読む)
システム操作者支援のための支援制御装置を備えたシステム、制御操作支援装置、制御操作支援方法、運転操作支援装置、及び運転操作支援方法
走行目標経路生成回路が、制御対象物の現在位置から制御対象物が将来走行することができる走行目標経路を算出し、理想制御信号算出回路が、走行目標経路Pに沿って走行するための制御プロフィールS’を算出し、差異算出回路が、理想制御の大きさS’と制御の現在の大きさS’との差異δを算出する。そして、制御システム支援制御装置は、算出された差異δの大きさに基づいて制御システムを制御することにより、操作者の制御操作を支援する。これにより、理想的な制御状態、操作者の制御操作状態、環境状態及び要求される操作精度からの差異δの大きさの関数である制御操作の支援を運転者に提供することができるので、操作者、環境及び制御対象物を特徴づける諸条件に適した制御操作支援制御を出力することができる。 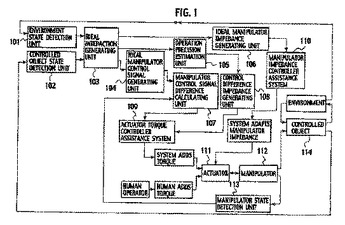 (もっと読む)
(もっと読む)
繰り返して実行される作動サイクルを持つ制御対象のフィードバック制御を行うための方法および制御配列
繰り返して実行される作動サイクルを持つ配列のフィードバック制御に際しては、例えばエンジン・テストスタンドにおいては、被験体(例えばエンジン)により、前記配列の作動周波数域で共振が励振されることがたびたびあるが、これは、フィードバック制御により減衰することができる。そのために本発明により、フィードバック制御の一つの現時点の実際値rist_aktと、以前に行われたいずれか一回の作動サイクルにおける実際値に基づいて、間近に生じるシステム・ディレイを随伴しない一つの実際値を予測した一つの値とから、一つの修正後の実際値rist_modを算出して、これを制御にフィードバックする制御コンセプトが提案される。 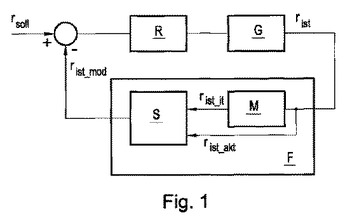 (もっと読む)
(もっと読む)
1 - 20 / 61
[ Back to top ]