
Fターム[5H004KC31]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647)
Fターム[5H004KC31]の下位に属するFターム
ゲインスケジュール方式 (11)
モデルを有するもの (165)
適応動作が切換えのもの (90)
同定器を有するもの (225)
設定値の変動に対するもの (12)
偏差の変動に対するもの (21)
検出値の変動に対するもの (47)
外乱変動に対するもの (45)
負荷変動に対するもの (25)
Fターム[5H004KC31]に分類される特許
1 - 6 / 6
ドライブ装置の調整装置
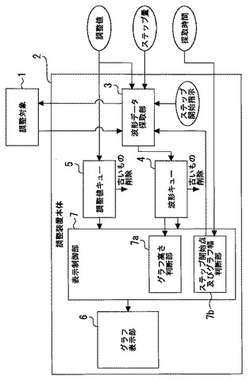
【課題】調整値の変更前後における出力波形の差異を容易に把握することができ、出力波形の比較にかかる手間を低減できるドライブ装置の調整装置を提供する。
【解決手段】ドライブ装置の調整装置において、テストバイアスにテストステップを加えた入力を調整対象であるドライブ装置に与えて出力されたフィードバック波形を採取する波形データ採取部と、前記採取されたフィードバック波形のデータを、前記採取された順序で保持する波形キューと、フィードバック波形が前記採取された時に調整対象に設定されている調整値の情報を、前記採取された順序で保持する調整値キューと、テストステップ波形及び波形キューのフィードバック波形を、重ね合わせ、かつ、それぞれ区別可能に表示可能であるとともに、調整値キューの調整値の情報を、フィードバック波形のそれぞれと対応させて表示可能である表示部と、を備える。
(もっと読む)
内燃機関の燃料噴射制御装置

【課題】内燃機関の運転状態の検出結果の信頼性が低下し、制御誤差が一時的に増大するような条件下でも、制御誤差を適切かつ迅速に補償でき、それにより、安定した燃焼状態を確保でき、燃焼時のノイズを抑制することができる内燃機関の燃料噴射制御装置を提供する。
【解決手段】制御装置1の噴射時期コントローラ30は、実着火時期Cmbを目標着火時期Cmb_TRGTになるように、FB項Inj_FBを算出し、図7,8のマップから算出した値Bs_Inj,IEGR_Injと、4つの修正値DBs_Inj,DBs_NVInj,DIEGR_Inj,DIEGR_NVInjとを加算することにより、FF項Inj_FFを算出し、FF項Inj_FFにFB項Inj_FBを加算することにより、目標噴射時期Inj_TRGTを算出する。2つの修正値DBs_Inj,DIEGR_Injは、追従誤差EIgが値0になるように算出される。
(もっと読む)
サーボ制御方法、サーボ制御装置
【課題】オープン制御から適応スライディングモード制御へと移行する際の制御性の悪化を回避する。
【解決手段】オープン制御から適応スライディングモード制御へと移行する際に、適応スライディングモードコントローラ51の制御入力を移行直前のオープンコントローラ52の制御入力に一致させるべく、適応スライディングモードコントローラ51の状態量を算定するようにした。
(もっと読む)
制御装置、温度調節器およびゲイン調整装置
【課題】傾斜温度(温度差)を用いた温度制御などにおいて、干渉の強い制御対象であっても、ハンチング等が生じないようにすることを目的とする。
【解決手段】温度差である傾斜温度に基づいて、操作量を演算する傾斜モモードのコントローラCgと、平均温度に基づいて、操作量を演算する平均モードのコントローラCaとを備える温度調節器において、傾斜温度に基づいて、干渉を打ち消すように、傾斜モードおよび平均モードの各コントローラCg,Caの操作量を調整する傾斜モードおよび平均モードの非干渉化器Fg,Faを設けている。
(もっと読む)
位置制御装置、位置制御方法及び位置制御プログラム
【目的】物体の位置を、物体を保持する移動機構によって目標位置に速やかに追従させる技術を提供する。
【構成】本発明は、物体の位置を検出する位置検出器と、物体を保持しており物体に加える力の指令値が入力され入力された指令値を実現するように動力によって動作する移動機構と、物体に加える力の指令値を移動機構へ出力する指令装置を備える。指令装置内に構築された制御ロジックは、スライディングモード制御ロジックに対してs/(L+K・s+B・s2)の局所的なフィードバックループを付加したものである。この局所的なフィードバックループにより、物体の位置を目標位置に追従させる際にオーバーシュートを生じさせることなく、さらに指令装置が出力する指令値がチャタリングすることを防止できる。
(もっと読む)
モデル予測制御装置及びモデル予測制御方法
【課題】 モデル予測制御を直接適用することが困難なシステムに対しても、モデル予測制御を適用すること。
【解決手段】 燃料電池スタックとその補機からなるシステムに対して、まず補機の目標値を大きく設定して(S1)、燃料電池スタックのモデルを用いて目標値を最適化する(S2)。次に、最適化された目標値を満足するように、補機のモデルを用いて補機の操作量を最適化する(S3)。さらに、最適化された補機の操作量から車両燃費を算出し、これを考慮して補機の操作量を再度最適化して、最適化された操作量を実機に与える。
(もっと読む)
1 - 6 / 6
[ Back to top ]