
Fターム[5H004KC32]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647) | ゲインスケジュール方式 (11)
Fターム[5H004KC32]に分類される特許
1 - 11 / 11
組み込み知能コントローラ、制御システム、制御プログラム、記録媒体、及び制御方法
【課題】インテリジェント・ロバスト制御を実現する組み込み知能コントローラを提供する。
【解決手段】
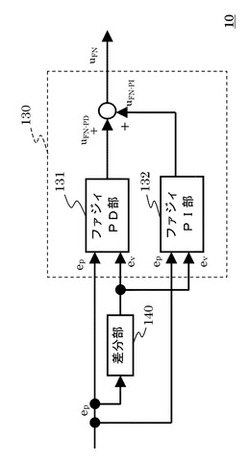
制御対象の目標軌道誤差の変化に適応的にゲインを可変調整する組み込み知能コントローラ1のICS部10を用いる。ICS部10は、ファジィ・ニューラルネットワークにより非線形誤差を減少させる補償器であるFB−FN部130(ファジィ・ニューラルネットワークによる非線形偏差補償器)を備える。FB−FN部130は、制御対象の非線形動特性のPD(比例、微分)補償を行うファジィPD部131と、制御対象の非線形動特性のPI(比例、積分)補償を行うファジィPI部132とを並列に備える。
(もっと読む)
位置制御装置

【課題】 制御対象機械を目標位置へ移動させて停止させるための位置制御装置において、オーバーシュートの抑制とサイクルタイムの短縮を可能にする。
【解決手段】 フィードフォワード制御ブロック27aは位置指令ブロック21からの前記位置指令値に対して、フィードフォワード設定手段41で設定し出力されるフィードフォワードゲインを乗じた値を、新たな補正量として出力する機能を有し、この位置制御装置40が位置決め制御動作を開始すると、フィードフォワード設定手段41では、位置指令ブロック21からのパルス列形式の位置指令値に含まれるパルス周波数の変化に基づく速度指令演算値を求めつつその変化を監視し、この速度指令演算値が予め定めた切換設定値より小さいときにはフィードフォワード制御ブロック27aへのフィードフォワードゲインのより小さく設定することにより、位置決め終了時のオーバーシュートの抑制と位置決め開始から終了までのサイクルタイムの短縮とを可能にしている。
(もっと読む)
ゲインスケジュール制御装置及び制御方法
【課題】 慣性や剛性、共振特性等が運転状況によって変動する機械装置に対するスケジューリング制御を簡便に実現できるようにする。
【解決手段】 ゲインスケジュール制御装置は、機械装置10に指令入力を送るコントローラ14、前記機械装置の指令入力及び出力信号に基づいて前記機械装置の運動特性の同定と前記コントローラのゲインの調整を行う適応調整器15、スケジューリングルールに基づいて前記コントローラのゲインを更新するスケジューリングルール部13を有し、前記スケジューリングルール部は、前記適応調整器の出力と、前記機械装置の運転状態量とに基づいて、前記コントローラのゲインの更新を行う。
(もっと読む)
機械制御装置
【課題】 先端に重量物が取り付けられた長尺のアームを移動させる場合でも、振動を伴うこともなく目標位置に停止させる機械制御装置を提供する。
【解決手段】 機械制御装置40には、調節動作の際の比例ゲインが可変構造の位置調節器41を備え、さらに、この機械制御装置40には位置指令ブロック24の出力である位置指令値に基づいて、位置調節器41の比例ゲインを可変する指令を送出する比例ゲイン設定手段42を備えている。
この比例ゲイン設定手段42では、位置指令ブロック24からの位置指令値に基づく移動速度が遅いとき、すなわち、移動距離が短い位置指令値のときには位置調節器41の比例ゲインを大きく設定し、前記位置指令値に基づく前記移動速度が速いとき、すなわち、移動距離が長い位置指令値のときには前記比例ゲインを小さく設定するようにしている。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】搬送アクチュエータの振動を抑制すると共に、各駆動軸の回転動作が他の駆動軸に与える影響を低減する。
【解決手段】右搬送アクチュエータ32が伸縮動作する場合、中央制御装置10の制御部12は、縮み位置から伸び位置へ移動させるための位置指令を右搬送アクチュエータ制御装置30に出力し、現状を維持するための0°の位置指令を旋回アクチュエータ制御装置40に出力し、現状を維持するための距離0の位置指令を左搬送アクチュエータ制御装置20に出力する。右搬送アクチュエータ制御装置30は制振制御用の位置ゲインを用いて制振制御を行い、旋回アクチュエータ制御装置40は駆動軸42−Kが回転しないように維持制御を行い、左搬送アクチュエータ制御装置20は通常の位置ゲインを用いて駆動軸22−Kが回転しないように維持制御を行う。
(もっと読む)
電子制御装置及びフィードバック制御方法
【課題】制御対象装置に印加される電源電圧が変動した場合でも、適切な制御を行うことを可能とする電子制御装置及びフィードバック制御方法を提供する。
【解決手段】制御対象の前記目標値と実測値との偏差と前記制御対象に係る駆動装置に印加される電源電圧値とをパラメータとして、前記伝達関数の制御係数及び/又は前記伝達関数の積分項の零点設定値を補正する補正値を格納する参照手段を備え、当該参照手段から得た前記伝達関数の補正値に基づいて前記伝達関数の制御係数(又は積分項の零点設定値)を補正し、この補正された伝達関数に基づいて前記駆動装置へ出力される駆動信号を決定する。
(もっと読む)
PID制御装置及びPID制御方法
【課題】PID制御対象を制御するためのPIDパラメータを決定して、該PIDパラメータを用いて、上記制御対象を制御する場合に、予測モデルを構築しないで最適なPIDパラメータを容易に決定できるようにして、制御の信頼性を向上させる。
【解決手段】時刻tの時点での制御対象への入力、該制御対象からの出力及び目標値をそれぞれu(t)、y(t)及びr(t)とし、上記入力の差分に対する重み係数をλとし、むだ時間をkとし、差分演算子をΔとしたとき、
φ(t+k)=y(t+k)−r(t)+λΔu(t)
で表される一般化出力φ(t+k)が小さくなるように、上記PIDパラメータを決定する。
(もっと読む)
質量流量コントローラのコントローラ利得スケジューリング
フィードバック制御利得を有する質量流量コントローラは、コントローラを通過する流体の流れを検知するように構成されているセンサと、コントローラを通過する流体の流れを調節するように配置されている弁と、センサが検知する流体の流れの関数として、弁を制御するように構成されているプロセッサとを備えている。センサおよび弁は、フィードバック系内に配置され、プロセッサは、少なくとも1つの較正気体パラメータの少なくとも1つの動作気体パラメータに対する比に基づいて、フィードバック・コントローラ利得をリアル・タイムで更新し、較正状態とは異なる動作状態において一定の制御挙動を有するように、フィードバック系の閉ループ伝達関数が、動作状態には関係なく、実質的に一定となるようにする。 (もっと読む)
ゲインスケジューリング制御のためのシステム
ゲインスケジュールドフィードバックコントローラ10、11、30、40によって起動することができる、非線形プラント18を制御するシステム。様々なゲインを有する幾つかの線形サブコントローラ13、25、26、101、102を1つのユニットとしてまとめることができる。外因性パラメータ又は内因性パラメータに従って、1つのサブコントローラ13、25、26、101、102から別のサブコントローラに切り換えることによって、コントローラ10、11、30、40全体を変更させることができる。切換器に対する信号21は、特定の時点に発生するプラント18の動作範囲を反映し、それらの時点においてプラント18の出力信号17及び入力信号16に関連してシステムから所望されるゲインを示すことができる。本手法の利点は、大域的及び局所的の両方の、公称安定性及びロバスト安定性を保証すること、産業実務者によく知られている制御構造の使用を可能にすること、及び本手法の実施のために高度な数学的技法を一切必要としないことを含むことができる。 (もっと読む)
制御装置
【課題】ゲイン変更時に生じる速度変動を抑制することができ、リアルタイムにゲインの変更をしても、指令値に対する軌跡精度が低下することがない制御装置を提供する。
【解決手段】制御装置は、位置指令を生成する指令生成部2と、所定のタイミングでゲインを変更し、サーボ制御部2に出力するゲイン制御部3と、指令生成部2より出力される位置指令を補正し、補正位置指令を生成する位置指令補正部4と、補正位置指令と、ゲイン制御部3からの変更後のゲインに基づいてモータを駆動するサーボ制御部1とを備えている。
(もっと読む)
機械定数同定装置を備えたモータ制御装置
【課題】非線形摩擦や雑音などの影響を抑制し、微小動作のみで負荷の連結したモータ105の粘性摩擦を同定するとともに、粘性摩擦同定値を用いて高精度な制御をすることができる機械定数同定装置を備えたモータ制御装置を提供する。
【解決手段】粘性摩擦同定器108として、位置を入力し位置振幅を出力する振幅演算器109と、前記位置振幅を入力し粘性摩擦同定値を算出し出力する粘性摩擦演算器110とを備える。
(もっと読む)
1 - 11 / 11
[ Back to top ]