
Fターム[5H004LA05]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 非線形要素を含むもの (53)
Fターム[5H004LA05]の下位に属するFターム
不感帯を有するもの (6)
ヒステリシスを有するもの (11)
飽和要素を有するもの (5)
Fターム[5H004LA05]に分類される特許
1 - 20 / 31
組み込み知能コントローラ、制御システム、制御プログラム、記録媒体、及び制御方法
【課題】インテリジェント・ロバスト制御を実現する組み込み知能コントローラを提供する。
【解決手段】
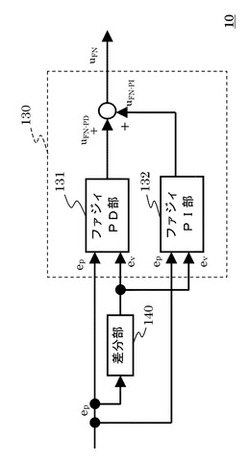
制御対象の目標軌道誤差の変化に適応的にゲインを可変調整する組み込み知能コントローラ1のICS部10を用いる。ICS部10は、ファジィ・ニューラルネットワークにより非線形誤差を減少させる補償器であるFB−FN部130(ファジィ・ニューラルネットワークによる非線形偏差補償器)を備える。FB−FN部130は、制御対象の非線形動特性のPD(比例、微分)補償を行うファジィPD部131と、制御対象の非線形動特性のPI(比例、積分)補償を行うファジィPI部132とを並列に備える。
(もっと読む)
自動化されたPIDコントローラの設計
本発明の実施形態は、ユーザーが、自由形式モデリング環境においてPIDコントローラなどのコントローラの対話型設計を実行できるようにするための技術、コンピュータ読み取り可能媒体、及び装置を提供する。ユーザーは、コントローラの性能に関連付けるのがユーザーには難しい場合があるコントローラのゲイン値の指定をするのではなく、典型的なユーザーになじみのなる特徴を用いてコントローラを調整することができる。 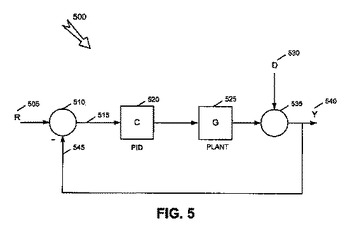 (もっと読む)
(もっと読む)
インバータシステムの無駄時間補償装置

【課題】制御対象に非線形要素を含んでいても、直接制御対象モデルに組み込んでスミス予測器を具備した無駄時間補償装置及びその方法を提供する。
【解決手段】無駄時間を有する制御対象として、当該制御対象におけるフィードバック制御系の安定性を保つための無駄時間補償装置であって、非線形要素を含む制御対象G(s)e-sLと同じ応答特性を有するモデル回路P(s)を、オペアンプ回路によるアナログ計算機、又はFPGA回路のハードウエア回路で実装したスミス予測器を具備し、前記モデル回路P(s)に、前記制御対象と同じ信号を入力して出力信号を取得し、前記取得した出力信号をフィードバック制御系に負帰還させ、さらに前記取得した出力信号を、前記制御対象と同じ無駄時間要素e-sLに入力し、前記入力した無駄時間要素e-sLの出力信号と前記制御対象の出力信号の差分信号を、フィードバック制御系に負帰還させている。
(もっと読む)
流体温度制御装置及び方法
【課題】流量制御弁の固体差に対応でき、オーバーシュートが良好に抑制でき、負荷外乱に十分に対応できる流体温度制御装置を提供する。
【解決手段】作動流体を熱交換器で冷却水により冷却し、ランプヒータで加熱して目標温度にする。冷却水の流量制御弁の制御では、熱交換器の非線形な冷却特性を補償するテーブルと、比例弁の非線形な流量特性を補償するテーブルとの2種類のテーブルを使用する。比例弁特性を補償するテーブルは、各パルス数位置に対して、その位置から1パルス数だけ移動したときに生じる流量の変化率を定義している。比例弁特性を補償するテーブルは、比例弁の固体差を表したパラメータを適用することで、個々の比例弁の特性に適合したものになる。過渡時には、現在温度の変化速度に応じて比例弁制御を行なう。整定時には、ランプヒータの出力を所定の適正出力範囲内に収めるように比例弁を制御する。
(もっと読む)
ΔΣ変調アルゴリズムを用いてプラントを制御する制御装置
【課題】ΔΣ変調アルゴリズムを用いて、所与のプラントを良好な精度で制御する。
【解決手段】モデルパラメータを用いてモデル化された制御対象を制御する制御装置は、モデルパラメータを同定する同定器と、該同定器に接続されたコントローラであって、制御対象の出力が目標値に収束するように、前記モデルパラメータを用いて参照入力を算出するコントローラと、該コントローラに接続された変調器であって、該参照入力に、ΔΣ変調アルゴリズム、ΣΔ変調アルゴリズムおよびΔ変調アルゴリズムのうちの1つを適用して、制御対象への制御入力を算出する変調器と、を備える。同定器は、制御対象の出力および参照入力に基づいて、モデルパラメータを同定する。同定器は、参照入力に基づいてモデルパラメータを算出するので、モデルパラメータが振動的になることを防止することができる。
(もっと読む)
自動適合装置及び方法
【課題】効率的且つ効果的に適合値を決定する。
【解決手段】自動適合システム100において、次善最適解決定処理が実行される。当該処理においては、パラメータx1及びx2に応じて変化する目的関数F1及び制約関数F2相互間のパレート解が、適合範囲内のパラメータ値について導出され、目的関数F1及び制約関数F2により規定される座標平面上で、パレート解に対応する座標点を繋げて得られるパレート解曲線PRF_Pが設定される。一方、当該適合範囲でパラメータを変化させた場合の、目的関数F1及び制約関数F2各々における最大値と最小値との偏差DOPT及びDLIMに基づいて規定される傾きkに、更にエンジン200の定常比率Aに応じて定まる補正係数αを乗じてなる傾きk’の直線が設定される。この直線とパレート解曲線との接点に対応するパレート解が、次善的な最適解として抽出される。
(もっと読む)
シミュレータ及び記憶媒体及びプログラム及び制御装置及びシミュレータの制御方法
【課題】本発明は制御装置を代えずに制御システムを高機能化及び高速処理化することを課題とする。
【解決手段】シミュレータ10には、シーケンサ20と、軌道生成器30と、理想フィードバック制御器40と、ホルダ50と、実システムモデル60とがコンピュータ上の仮想機器として形成される。理想フィードバック制御器40は、シミュレータ10上において、制御対象モデル90の状態量と、動作指令パターンから実システムモデル60への入力を決定し、フィードバックループを策定すると共に、実システムモデル60への入力を時系列データとしてメモリ15に出力する。ホルダ50は、シミュレータ10上において、実システム110上のシーケンサ112のサーボサイクル毎に演算結果によって値が更新され、次のサーボサイクルまで値を保持する。ホルダ50で生成される理想制御入力の更新周期は、シーケンサ112と同じサーボサイクルになる。
(もっと読む)
ファジィ制御装置、レーン走行支援装置、および操舵補助装置
【課題】ファジィルールを合理的に選定する。
【解決手段】ファジィ制御装置は、複数の入力変量に対しファジィ推論を行って出力変量を生成し、生成した出力変量を制御対象に出力して制御するものである。ファジィ推論に利用されるファジィルールは、複数の入力変量に関するリヤプノフ関数Vの安定条件を示す条件式dV/dt<0と、複数の入力変量の少なくとも1つの時間微分と出力変量との対応関係を示す関係式とに基づいて選定される。これにより、各入力変量に対応するメンバーシップ関数を2つに減らし、ファジィルールの数を2n(nは入力変量の数)に減らすことができる。
(もっと読む)
発電プラントの運転最適化方法及び装置
【課題】複数のタービンを備える発電プラントにおいて、最も発電効率が高くなるように各タービンの負荷配分を制御する運転最適化方法を提供する。
【解決手段】発電プラントにおける制約条件を満たしつつ、最も高い発電効率を得る最適化制御に際して、発電プラントのモデル式から最適解を得るためのステップを、リプシッツ最適化アルゴリズムを用いるステップと、そのステップで得られた初期解を用いて逐次2次計画法を用いるステップとの2段階のステップを設け、初期解に依存して発生する局所的最適解による運転を防止する。
(もっと読む)
剛性同定装置およびそれを備えたモータ制御装置
【課題】 非剛性パラメータが分からない場合にも、微小動作のみで負荷が低剛性に連結したモータの剛性を高精度に同定することができる剛性同定装置およびそれを備えたモータ制御装置を提供する。
【解決手段】 剛性同定器107が、トルク指令とモータ位置との乗算値である位置トルク指令乗算値を算出する位置トルク指令乗算器108と、モータ位置の振幅であるモータ位置振幅を算出する位置振幅演算器109と、前記位置トルク指令乗算値と前記モータ位置振幅に基づいて剛性同定値を算出して出力する剛性演算器110と、を備える。
(もっと読む)
制御装置および温度調節器
【課題】制御対象の非線形特性を線形化できるようにする。
【解決手段】制御対象2と外界との熱伝達の影響を打ち消す線形化器4を設け、制御対象2の検出温度y1,y2と外界の温度θ∞との温度差を、熱伝達項10−1’,10−2’を介して制御対象2の入力側である操作量側にフィードバックし、制御対象2と外界との間の非線形な熱伝達の影響を打ち消すようにしている。
(もっと読む)
システムの最適制御方法
【課題】予見不可能な時変目標値に追従する有限評価区間の非線形最適制御問題の制御則を導くことが課題である.
【解決手段】Receding Horizon制御を用いた非線形最適制御問題の近似解法を開発し,非線形システムの実時間制御に適用できる一般的手法を導いた.
具体例としてRR車の旋回限界域におけるDYCの目標横すべり角追従制御に適用した結果、一般的な比例制御に比べ追従性(応答性と収束性とも)が大幅に向上できることを確認した.また旋回限界域においてもニュートラルステア特性を実現できることを明らかにした.
(もっと読む)
モデルベース制御技法におけるロバストなプロセスモデルの同定方法及びシステム
【課題】プロセスモデル・パラメーター収束が得られなかった状況においても許容範囲内のパラメトリック・プロセスモデルの生成を可能にするプロセスモデル同定方法及びシステムを提供する。
【解決手段】MPCコントローラ生成などのコントローラ生成に用いるプロセスモデルを生成するロバストな方法は、モデル生成プロセスにおいて使用される収集されたプロセスデータにノイズを添加する。特に、パラメトリック・プロセスモデルを生成するロバストな方法は、まず周知のテスト入力信号または系列に基づいてプロセス出力を収集し、収集されたプロセスデータにランダムノイズを添加し、該収集プロセスデータからプロセスモデルを決定するために標準または周知の技法を使用する。
(もっと読む)
サーボバルブの制御装置
【課題】流体圧力制御におけるダイナミックレンジの広い目標値を設定することが可能であり、非線形領域においても安定した制御特性を得ることができるサーボバルブの制御装置を提供する。
【解決手段】サーボバルブに対する制御量の目標値から所定の基準入力信号を生成して出力する設定部と、サーボバルブの制御量を検出して帰還量を出力する検出部と、設定部から出力された基準入力信号と検出部から出力された帰還量とを比較してその偏差を出力する比較部と、この比較部が出力した偏差を受けて、サーボバルブに与える操作量を出力する調節部とを具備したサーボバルブの制御装置であって、比較部と調節部との間に介挿されて、比較部が出力した偏差を基準入力信号のレベルに従って所定のレベルに調整して調節部に出力する可変利得調節部を備える。
(もっと読む)
システムの最適制御方法
【課題】従来の理論では、解析的に最適制御則を導くことが困難であった非線形最適制御問題に対して、見通しの良い最適制御則を得るプロセスを明らかにすること.
【解決手段】入力に関する評価関数を制御装置から制御対象に伝達されるエネルギとし,これに制御性能を表現する関数を加えて全体の評価関数とする.さらに付帯条件として制御対象の完全なパワー収支の式を加えて汎関数とする.こうすると汎関数は制御変数に関して1次式となるので,制御対象が線形,非線形を問わず汎関数を最小化する条件から微分方程式を解かずに最適制御則を解析的に導くことができる.これにより、従来解析的に最適制御則を求めることが難しかったエネルギ回生制御や非ホロノミック拘束を有する非線形制御問題に対しても最適制御則を求めることができるようになった.
(もっと読む)
倒立移動装置及びその制御方法
【課題】車体の倒立状態を維持したまま、より高い段差を乗り越えることができる倒立移動装置を提供する。
【解決手段】倒立移動装置10は、路面の段差を検出する路面センサ29と、車体20の傾斜角速度θ’を検出するジャイロセンサ28と、車輪12、14の回転角速度を検出するエンコーダ22a、24aと、各センサにより検出された検出値に応じて、コントローラ70がモータ22、24に制御指令値を出力することにより、車体20を倒立状態に維持しながら路面上を走行する。コントローラ70は、路面センサ29により進行方向に段差が検出された場合は、段差を乗り越えるときに車体20を進行方向に対して後ろ側に傾斜させる。
(もっと読む)
自己組織化マップを用いる装置、その方法及びプログラム
【課題】数少ないトレーニングケースから汎化性の高い制御を実現することができる装置を提供する。
【解決手段】装置内に複数存するニューラルネットワークのモジュールからなるユニットのうち、最も次時刻の制御対象の予測状態を正しく予測した予測器を含むユニットに係る制御器の制御信号を採用して制御対象を制御するので、即時性の高い制御を実現することができると共に、自己組織化マップを形成することができる。
(もっと読む)
非線形特性再現装置、非線形抵抗再現装置、および非線形特性再現プログラム記憶媒体
【課題】本発明は、状態量に非線形変換を施して出力する非線形特性再現装置に関し、製品や部品の非線形な挙動や振る舞いをモデル化して再現する。
【解決手段】入力状態量の、次期標本化時期における推定観測量を入力して、次期標本化時期における出力状態量の推定値が推定観測量で規格化されてなる規格化推定値を求める非線形特性再生部と、非線形特性再生部で求められた規格化推定値に基づく非線形演算により、次期標本化時期における入力状態量を次期標本化時期における出力状態量に変換する状態量変換部とを備えた。
(もっと読む)
非線形ダイナミクスを有する制御対象のためのモデル化装置、非線形ダイナミクスを有する制御対象のための制御装置、非線形ダイナミクスを有する車両のための制御装置及び非線形ダイナミクスを有する制御対象のためのモデル化プログラム。
【課題】非線形ダイナミクスを有する制御対象についてモデル化を容易にし、求められたモデルを用いて非線形ダイナミクスを有する制御対象の制御を可能とすることである。
【解決手段】車両制御システム30は、大別して2つの機能及び構成に分けて考えることができる。その1つは、モデル化コンピュータ40によって実現されるもので、車両10の制御特性を模擬した模擬車両20から、制御に関するパラメータを多数収集し、それを用いて、非線形状態変数xと線形入力変数uについて
の形式で車両10のモデル化を行う。その2は、車両制御コンピュータ70によって実現されるもので、モデル化コンピュータ40によって得られた車両10のモデルを用い、実際の車両10について、姿勢制御が行われる。
(もっと読む)
制御装置
【課題】ワインドアップ現象を起こさずに飽和要素を含む制御対象に対し制御機能を限界まで発揮する。
【解決手段】線形制御器5が、制御対象2の操作量を生成するための線形操作量Ueqを生成すると共に、非線形操作量Unlに基づいて線形操作量Ueqの大きさを制限するの。これにより、非線形操作量Unlの大きさを考慮する必要がなくなるので、非線形制御器6はワインドアップしなくなる。またこの結果、非線形制御器6でワインドアップ現象を考慮する必要がなくなるので、線形制御器5でのみ飽和時の影響を考慮すればよくなる。
(もっと読む)
1 - 20 / 31
[ Back to top ]