
Fターム[5H004LA11]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 数式で表されているもの (208)
Fターム[5H004LA11]の下位に属するFターム
微分、差分、状態方程式で表されているもの (124)
Fターム[5H004LA11]に分類される特許
1 - 20 / 84
カルマン・フィルタの処理方法、プログラム及びシステム
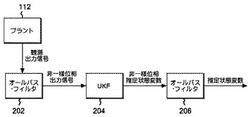
【課題】 Unscentedカルマン・フィルタにおいて、プラント特性を考慮した非一様更新タイミングに基づき、推定精度を改善する技法を提供すること。
【解決手段】 カルマン・フィルタへの入力を、分子と分母の多項式の関係が鏡像多項式の関係によって記述される、オールパスフィルタを通すことで非一様更新を実現し、ポリフェーズフィルタによるリサンプリングとは異なった演算量を抑える構成とする。次に、カルマン・フィルタによって得られた推定状態量はそのままでは位相が非一様間隔のものであるため、上記非一様化の逆変換となるフィルタリングを行う。
(もっと読む)
適応的外乱抑制方法、コンピュータで読み取り可能な記録媒体、適応的外乱抑制装置、ディスクドライブ装置、およびディスクドライブ装置制御方法

【課題】システム使用環境によるシステムの安定度を考慮して、外乱によるシステムの性能低下を最小化させることが可能な、新規かつ改良された適応的外乱抑制方法、コンピュータで読み取り可能な記録媒体、適応的外乱抑制装置、ディスクドライブ装置、およびディスクドライブ装置制御方法を提供する。
【解決手段】ユーザ環境でシステムに印加される一つ以上の外乱周波数成分を推定するステップと、推定された一つ以上の外乱周波数成分に基づいて外乱観測器2000を備える外乱補償サーボ制御ループの特性を決定する一つ以上のパラメータ値を最適化させるステップとを有する適応的外乱抑制方法が提供される。
(もっと読む)
バンプレス調節弁操作
【課題】操作の安全性および弁の耐久性確保に不可欠な要件であるバンプレス調節弁操作を実現する手法を提供する。
【解決手段】制御系の開ループ手動操作で、適切なリセット時間で発生する操作量のランプ(傾斜)変化と、これに対する制御量応答とを計測および解析する。解析結果から、操作量から制御量までの定位性制御対象信号伝達特性値、すなわちゲイン定数Kと遅れ時間(等価時定数T+等価むだ時間L)とより、最適リセット時間RoをRo=4*|K|*(T+L)とする。ワンパラメータ(R)チューニングによりバンプレスな調節弁操作を行うことができる。
(もっと読む)
システム同定装置及び同定方法
【課題】プラントの動特性変化を、オペレータにわかりやすいモデルパラメータを用いて、定量的に、日常の制御計算に影響を与えない低計算負荷でプラント操業運転を停止することなく同定するシステム同定装置及び同定方法を提供する。
【解決手段】応答データ記憶装置10から同定処理駆動イベントを検出する同定処理駆動イベント検出装置40、検出された同定処理駆動イベント前後の応答データを切り出す応答データ切り出し装置50、切り出された応答データをもとにプラント動特性変化を同定する動特性変化同定装置60、同定された動特性変化分が与えられた動特性変化検出条件を満たすかどうかを判定し、該条件を満たす場合には表示出力指示を行う動特性変化検出装置70を備える。
(もっと読む)
スライディング・モード制御方式において、制御器を構成する方法、プログラム及びシステム
【課題】 プラントにおいて、スライディング・モード制御を適用すべきかどうかを、必要最小限の計測実験データから自動判別すること。
【解決手段】 システムは先ず、プラントを、オープン制御的に計測し、その計測データを用いて、既存のシステム同定手法と次数決定法により、プラントの状態方程式を記述する。スライディング・モード制御の切換超平面を設計する。次に、超平面に拘束された時の線形モデルの制御入力のみを用いた場合の出力と、スライディング・モードの制御入力を用いた場合の出力との間の差分について、3次モーメントと、4次モーメントという高次統計量を計算する。3次モーメントの値が所定の閾値より大きいかまたは、4次モーメントの値が所定の閾値より大きい場合、線形制御入力項と、非線形制御入力項の和として、制御器を構成する。3次モーメントの値と4次モーメントの値がどちらも、所定の閾値より小さいと判定した場合、システムは、線形制御入力項のみを用いて制御器を構成する。
(もっと読む)
制御因子特定用回帰式の生成方法
【課題】サンプルデータが多くても回帰式生成が速く、異常値の混入があっても精度が低下し難い車両制御因子特定用回帰式の生成方法を提供する。
【解決手段】サンプルデータ分割ステップにおいて、サンプルデータを複数のグループに分割し、回帰式生成ステップにおいて、第1のグループについては回帰式を生成し、第2以降のグループについては既存の回帰式に対する誤差を算出し、当該誤差について回帰式を求め、回帰式加算ステップにおいて、前記回帰式生成ステップで求められた回帰式と既存の回帰式(存在する場合)とを加算して新たな回帰式とする。
(もっと読む)
積分器
【課題】コンピュータによる連続動的システムの数学モデルをプログラムする際に、十分な精度を実現する。
【解決手段】時間離散的数値系列データを入力し、これら時間離散的数値系列データを、直線補間により折れ線で連続化した折れ線近似信号とみなして台形公式を用いて積分することにより基本項を算出し、時間離散的数値系列データの跳躍点をサンプリングして基本項を補正するための補正項を算出し、求められた基本項から補正項を減算して補正された積分値を生成する。
(もっと読む)
制御装置
【課題】より簡単な構成で目標入力に対し確実に追従可能な制御装置を提供する。
【解決手段】目標値rzと制御対象11の出力とに基づく第1操作量を制御対象11に与えるフィードバック制御器21と、目標値rzに基づく第2操作量を制御対象11に与えるフィードフォワード制御器31とを備え、j型(jは1以上の正整数)の制御系を生成する場合に、フィードフォワード制御器31が、目標値rzから前記制御対象11の出力と目標値rzの偏差までの伝達関数の分子の(j−1)次項以下の各項の係数をそれぞれゼロとするような制御要素を有している制御装置を提供する。
(もっと読む)
関節の運動シミュレーションに関するシステム及び方法
【課題】人工器官の要素の加速摩耗試験中に、人工器官の要素を駆動する人工器官駆動機構を備えたシミュレータを提供する。
【解決手段】シミュレーション入力は、シミュレータの動作を表し、センサ機構を使用し、人工器官の要素に加えられる力及びトルクを測定する。位置制御センサ及び向き制御センサをさらに使用し、人工器官要素の変位を測定する。センサに応答する閉ループフィードバック制御システムを使用して、駆動機構の駆動信号を決定する。制御システムは、有利には、靱帯繊維の機械的表現を組み込む計算モデルを追加する。計算モデルは、人体内の人工器官が直面するであろう状況の非人間近似であり、靱帯繊維の挿入部位及び機械的特性の寸法的幾何学的形状を含む。
(もっと読む)
加減速時のLPTCを使用したショートスパンシーク制御を行う磁気ディスク装置の制御装置および制御方法
【課題】ノミナルモデルが実プラントとモデル化誤差を含む場合に生じる、追従誤差を目標軌道に加え、目標軌道を再設計することにより目標軌道追従誤差を抑圧する学習型完全追従制御法(Learning based PTC:LPTC)を提案する。
【解決手段】マルチレートフィードフォワード制御を行う完全追従制御器と、シーク制御において、出力信号から目標軌道に対する追従誤差を学習し、新たな目標軌道を再設計するための目標軌道補償信号を生成する学習信号発生器とを備える学習型完全追従制御法により制御を行う磁気ディスク装置の制御装置及び制御方法を提供する。
(もっと読む)
制御装置及び露光装置
【課題】制御モデルの同定を最適化し、以ってフィードフォワード制御による高精度な位置制御を行う。
【解決手段】制御対象物の制御特性を表すモデルを用いた完全追従制御により前記制御対象物をフィードフォワード制御するフィードフォワード制御手段を備えた制御装置において、前記モデルは、前記制御対象物の周波数応答曲線における第1の変曲点が周波数10Hzより低い領域に存在し、且つ、第2の変曲点が前記第1の変曲点の周波数より高く周波数10Hzより低い領域に存在している場合に、前記第1及び第2の変曲点を含む周波数範囲において前記周波数応答曲線との誤差が最小となるようにモデルパラメータが設定されている。
(もっと読む)
アクティブフィードバック制御装置、方法、及びプログラム
【課題】制御性能を低下させることなく、同定対象の動特性を表わすパラメータを同定対象の動作中にオンライン同定する。
【解決手段】アクティブフィードバック制御装置28は、外乱が入力される制御対象12、制御対象12を駆動するアクチュエータ14、制御対象12の状態を検出するセンサ16を含む同定対象18の動特性を表わすパラメータと、センサ16からの検出信号と、に基づいて、制御対象12が目標の状態となるような制御信号を生成して出力するコントローラ20と、平均値が略ゼロとなる乱数を発生させる乱数発生部22と、コントローラ20から出力された制御信号と、発生させた乱数を制御信号に乗算したノイズ付加制御信号と、を加算してアクチュエータ14に出力する加算部24と、同定対象18の動特性を表わすパラメータを制御対象12の動作中にオンライン同定し、同定したパラメータをコントローラ20に出力する同定部26と、を備える。
(もっと読む)
可変構造制御装置
【課題】可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図る。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
(もっと読む)
アクチュエータ制御装置、アクチュエータ制御方法及びプログラム
【課題】油圧アクチュエータを制御するアクチュエータ制御装置を提供する。
【解決手段】本発明のアクチュエータ制御装置は、作動油圧値を変更する旨の変更指示要求に応じて、この変更指示要求の作動油圧値がヒステリシス特性における移行特性の特性状態にあるか否かを判定する油圧特性判定部11と、油圧特性判定部11から得られる判定結果が移行特性の特性状態にある場合に、この移行特性について近似したモデル化移行特性に従って油圧指示値を算出する油圧指示値算出部12と、該油圧指示値を、アクチュエータを制御するための制御信号に変換する信号変換部13とを備える。
(もっと読む)
モータ制御装置及びその設計方法
【課題】 モータ駆動等による多慣性共振特性を持つ機械装置の運動制御において、機械装置の振動を抑制しつつ、適切な指令応答特性を得ることのできる制御装置を提供する。
【解決手段】 モータ制御装置は、モータと負荷及びこれらを結合する結合部とを含む多慣性共振系を制御対象とし、制御指令値と制御対象からフィードバックされる状態量との差に基づいてモータを制御する閉ループ制御系を備え、該閉ループ制御系はモータ速度指令からモータトルク指令を決定する第1の制御手段を含むほか、前記状態量に応じて振動を抑制する制振制御器10を備える。前記第1の制御手段の第1のゲイン、前記制振制御器の第2のゲインを、閉ループ制御系の感度特性のカットオフ周波数ωS、閉ループ制御系の相補感度特性のカットオフ周波数ωCSを調整パラメータとして決定する。
(もっと読む)
プラント監視制御装置、その制御方法及びその制御プログラム
【課題】制御ブロックの構造及び定数の数を予め定めた条件下において指定されたモデルの構造を受け付け、当該指定された構造の定数のみを迅速に算出することで、モデル構造の設定及び当該設定に伴う各パラメータの算出を容易に行うことが可能なプラント監視制御装置、その制御方法及び制御プログラムを提供する。
【解決手段】表示制御手段61は、ユーザにモデル構造として定数G、T1、T2を選択させるために、選択可能とする所定数の定数(G、T1、T2、・・・の8定数)が予め決められたモデル構造を設定装置を介して表示させる。ユーザにより設定装置を介して定数G、T1、T2が選択されると、定数判定手段62は、この選択された定数G、T1、T2を受け付けて伝達関数を指定することでモデルを決定する。
(もっと読む)
むだ時間同定装置
【課題】 制御対象の特性によらず、容易にかつ確実に正確にむだ時間を同定することができるようにする。
【解決手段】 モータ速度を入力し前記モータ速度が発振しているかどうかを判定した結果を示す発振検出信号を出力する発振検出器106と、前記モータ速度を入力しその入力信号に基づいて制御対象のメカパラメータを同定し出力するメカ同定器107と、前記発振検出信号を入力し前記モータ速度は発振していなければ速度制御器に設定するパラメータである制御ゲインをさらに大きい値として出力する制御ゲイン調整器108と、制御ゲインと発振検出信号とメカパラメータを入力し臨界周波数を出力する臨界周波数演算器109と、前記制御ゲインと前記発振検出信号と前記メカパラメータと前記臨界周波数を入力しむだ時間同定値を算出するむだ時間同定器110と、を備える。
(もっと読む)
PIDコントローラのチューニング装置、PIDコントローラのチューニング用プログラムおよびPIDコントローラのチューニング方法
【課題】PIDコントローラが、精度良くプロセスを制御できるようにする。
【解決手段】チューニング装置100では、コントローラ10とプロセス20から構成される実際のシステムの操業データが利用されて、仮想のコントローラ51と仮想のプロセス52のモデル化が行なわれ、そして、得られたプロセス52のモデルが用いられて、コントローラ51の最適な制御パラメータが算出される。コントローラ10のチューニングに際し、算出された制御パラメータの数値を参考にすることができる。なお、チューニング装置100では、コントローラ51(制御ループ)ごとに制御性を評価し、制御性が低いと判断されたコントローラ51についてのみ、上記のモデル化や最適な制御パラメータの算出等が実行される場合がある。
(もっと読む)
モータによる位置制御装置
【課題】
本発明は、フィードバック制御系の構造および応答に無関係に、位置および速度フィードフォワード制御系を周波数応答に基づいて、個別に調整可能となる位置制御装置を提供する。
【解決課題】
本発明は、モータの位置検出値を位置指令値に追従させることを目的としたモータによる位置制御装置において、速度規範指令値を出力する速度規範モデルと、速度制御器と、速度フィードフォワード出力信号を出力する速度フィードフォワード部と、位置規範指令値を出力する位置規範モデルと、位置制御器と、位置フィードフォワード出力信号を出力する位置フィードフォワード部と、から構成されることを特徴とする。
(もっと読む)
モータを用いた駆動系の捩り振動制振制御方法
【課題】機差に応じた補正を行って効果的な捩り制振を行う方法を提供する。
【解決手段】動力源から車輪に到る駆動系にモータが含まれるとともに、その駆動系を捩り振動系としてモデル化した捩り振動モデルにおける捩り振動を抑制するために予め用意した数式モデルに基づいて前記モータをフィードフォワード制御することにより前記駆動系における捩り振動を抑制する、モータを用いた駆動系の捩り振動制振制御方法において、前記捩り振動系における前記モータを除いたいずれかの回転角度を基準とし、その基準となる回転角度の変化量に対する前記モータの回転角度の変化量の比の設計値と実測値との偏差Δαを求め、その偏差に基づいて、前記数式モデルにおける捩り変位を抑制する係数の設定値を補正する。
(もっと読む)
1 - 20 / 84
[ Back to top ]