
Fターム[5H004LA12]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 数式で表されているもの (208) | 微分、差分、状態方程式で表されているもの (124)
Fターム[5H004LA12]に分類される特許
1 - 20 / 124
ネットワーク型制御システム、およびネットワーク型制御システムにおける通信遅延時間制御方法
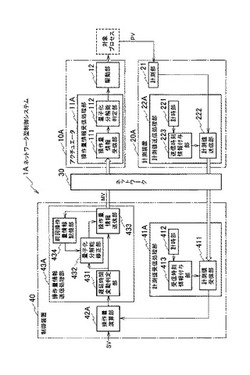
【課題】通信遅延時間の変動を抑制しながら制御性能を維持してフィードバック制御によるプロセス管理を実行することが可能なネットワーク型制御システム、およびネットワーク型制御システムにおける通信遅延時間制御方法を提供する。
【解決手段】ネットワーク型制御システムは、管理対象プロセスの状態を制御する制御対象機器と、対象プロセスの状態量を計測する計測装置20Aと、制御対象機器および計測装置20Aにネットワーク30を介して接続され、計測装置20Aによる管理対象プロセスの状態量の計測値に基づいて制御対象機器をフィードバック制御する制御装置40とを有する。このネットワーク型制御システムは、ネットワークにおける通信遅延時間を演算する手段と、通信遅延時間が所定値以上になったときに、前記フィードバック制御を行うために前記ネットワークに送出する情報量を低減させる手段とを備える。
(もっと読む)
設計装置及び設計プログラム

【課題】出力信号に含まれているノイズに係わらず、簡単な計算により最適な制御器を設計する。
【解決手段】入力信号u0を少なくとも1回入力して、制御対象Pから出力された出力信号y0を少なくとも1回計測することにより、少なくとも1回分の入出力データ(入力信号u0及び出力信号y0)を計測する。さらに、出力信号y0に対してスプラインフィッティングを行い、データを平滑化して、出力信号y0から雑音vを除去した出力データysを得る。さらに雑音vを除去した出力データysを線形独立なベクトルの組とし、制御対象Pの線形性に基づいて、目標出力信号y~との線形結合係数列θを算出し、当該線形結合係数列θを用いて、入力信号u0から目標入力信号u~を算出する。算出された1組の目標入力信号u~及び目標出力信号y~と参照モデルMに入力される参照信号r~との偏差e~から制御器Cの伝達関数を決定することにより、制御器Cを設計する。
(もっと読む)
ロボット制御システム、ロボットシステム及びセンサー情報処理装置
【課題】 ハードウェアー化や安定性の検証や解の応答性の切り替えを容易にするロボット制御システム、ロボットシステム及びセンサー情報処理装置等を提供すること。
【解決手段】 ロボット制御システムは、力覚センサー10からのセンサー情報に基づいて、ロボット100の目標軌道の補正値を出力する力制御部20と、目標軌道に対して補正値に基づく補正処理を行なって目標値を求め、求めた目標値を出力する目標値出力部60と、目標値に基づいてロボット100のフィードバック制御を行うロボット制御部80とを含み、力制御部20はデジタルフィルター部22を有し、力制御部20はセンサー情報に対してデジタルフィルター部22によるデジタルフィルター処理を行うことで、力制御における常微分方程式の解を求めて、求めた解に基づいて補正値を出力する。
(もっと読む)
最適モデル推定装置、方法、及びプログラム
【課題】誤差の分散値を推定せずに、高精度にモデリングを行うことができるようにする。
【解決手段】状態空間モデリング部22によって、観測値の時系列データに基づいて、カルマンフィルタのモデルパラメータを推定する。正規化カルマンフィルタデザイン部22において、状態ベクトルXの推定誤差分散の共分散行列を予測誤差分散で正規化した正規化推定誤差分散共分散行列と、正規化誤差λとを用いた正規化カルマンフィルタが定められる。状態推定部23によって、定められた正規化カルマンフィルタに従って、予測値を時系列に算出すると共に、対応する観測値との予測誤差を各々算出する。最適モデル推定部24によって、予め用意された正規化誤差λの各値を用いたときに状態推定部23によって各々算出された予測誤差に基づいて、最適な正規化誤差λを特定し、最適な正規化誤差λを用いた正規化カルマンフィルタを、最適モデルの推定結果とする。
(もっと読む)
適応制御装置および適応制御方法ならびに射出成形機の制御装置および制御方法
【課題】 応答性の悪化を防止しつつ最適な適応制御を自動的かつ簡単に行うことができる適応制御装置および適応制御方法ならびに射出成形機の制御装置を提供する。
【解決手段】 制御対象2から出力される制御値yに並列フィードフォワード補償器4から出力される補償値yfを加えた帰還値yaと指令値rに基づいて操作値uを出力するようにしてフィードバック制御を行う適応制御装置であって、並列フィードフォワード補償器4は、制御対象2の周波数応答特性を逐次推定する同定機構6と、当該周波数応答特性に基づいて補償値yfを調整する調整機構7とを備えている。
(もっと読む)
移動体の動作制御装置及びこれを用いたスロッシング制御装置
【課題】 移動体の状態を反映する画像情報をもとに、特徴量を抽出する手法を用いることはなく移動体を的確に制御することを可能にする移動体の動作制御装置を提供する。
【解決手段】 水を収容した水槽10と、水槽10を一方向に往復動させる駆動部12と、水槽10を視認するカメラ14と、カメラ14により取得された画像情報に基づき駆動部12により水槽10を制御して水槽10内の水を揺動状態から静止状態へ整定する制御部16とを備えるスロッシング制御装置であって、制御部16は、カメラ14から所定周期にしたがって順次取り込まれる水槽10中の水の画像情報を、数ベクトル空間を除くヒルベルト空間における1点と解釈して、安定化制御方法により、水槽10内の水を揺動状態から静止状態へ整定するようにモータ12を制御することを特徴とする。
(もっと読む)
マルチレート系の高速周波数応答同定法および高速周波数応答同定装置
【課題】制御出力のサンプリング周期が制御入力のそれの偶数倍である入力多重マルチレート系において、制御入力側のサンプリング周期における制御対象の周波数応答を同定する。
【解決手段】制御対象をFIRモデルにより表し、M系列信号の周期Mpとマルチレート比Pに基づきデータ長MpP-1分のM系列信号を生成し、前記M系列信号と、前記M系列信号を入力して制御対象から得られる出力データに基づき、制御対象のインパルス応答推定値を計算し、インパルス応答推定値を離散フーリエ変換することによって、前記制御対象の周波数応答を同定する。
(もっと読む)
モデル不一致を補償するためのチューニングを有する頑健な適応モデル予測コントローラ
【課題】MPC適応およびチューニング技法は、MPCタイプコントローラにおいて良好にフィードバック制御性能を統合し、プロセスモデル不一致の存在下で良好に働くMPC適応/チューニング技法をもたらす。
【解決手段】MPCコントローラ性能は、コントローラ適応/チューニングユニットをMPCコントローラに追加することにより高められ、その適応/チューニングユニットは、最適化ルーチンを実施して、特定の量のモデル不一致またはある範囲のモデル不一致の存在下でオンラインプロセス制御中にMPCコントローラ内で使用するための、最適な一組のコントローラ設計および/またはチューニングパラメータを確定する。閉ループ適応サイクルは、予測誤差または制御誤差に対して自己相関解析を実施して、有意のプロセスモデル不一致がいつ存在するかを判定してもよく、または、所定期間にわたって、プロセスモデル不一致の増減を判定してもよい。
(もっと読む)
軌道計画方法、軌道計画システム及び軌道計画・制御システム
【課題】運動コストを最小化するように状態空間を分割し、より精度よく準コスト最小軌道を計画することのできる軌道計画方法を提供する
【解決手段】本発明による軌道計画方法は、軌道計画システム(100)によって物体の状態を目標状態へ制御するための軌道を求める軌道計画方法であって、該物体の状態空間をセルに分割するセル作成部(103)が、所定のセルの数に対して、離散化による近似誤差を最小化するように該状態空間をセルに分割するステップと、探索木作成部(101)が、該状態空間において、該物体の状態遷移に対応する探索木を、該物体の状態に対応する、該探索木の枝のノードがセルに一つずつ含まれるように作成するステップと、軌道作成部(107)が、該探索木を使用して、該物体の現在の状態から目標状態までの経路を定めるステップと、を含む。
(もっと読む)
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム
【課題】物体初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コスト、かつ高い精度で求めることのできる軌道計画システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、予め複数の区域に分割された状態空間のそれぞれの区域に含まれる枝のノードの数を制限することによって枝を集約した逆方向探索木を作成する探索木作成部101と、該状態空間において、該逆方向探索木上の点に対して、その領域内であれば、該逆方向探索木にしたがって該目標状態に到達しうる、移行可能領域を定める移行可能領域決定部103と、探索木及び移行可能領域を記憶する探索木記憶部104と、該逆方向探索木を使用して該移行可能領域内の点から該根までの、該物体の軌道を定める軌道作成部105と、を備える。
(もっと読む)
非線形適応モデルベース制御の設計方法及び制御装置並びにプログラム
【課題】PIDのような複雑なマップを必要としない制御の体系的な設計方法及びこれを利用した制御装置並びにプログラムを提供する。
【解決手段】対象となる機械全系の物理モデルを受け、当該物理モデルを簡略化し、前記簡略化したモデルに対応する状態方程式を求め、当該状態方程式を用いて予め定められた制御系のパラメータを求めることにより当該制御系の設計を行うことを特徴とする非線形適応モデルベース制御の設計方法である。
(もっと読む)
行列生成プログラム、方法及び装置、並びにプラント制御プログラム、方法及び装置
【課題】モデル予測制御においてプラントに対する入力を高速に算出する。
【解決手段】モデル予測制御で解くべき方程式群を代数的簡略化法を用いて、係数行列とプラントに対する最適入力ベクトルとの積が目標値及び出力状態の関数ベクトルに等しくなるように変形することで、実際のプラントでは高速に最適入力ベクトルを算出することができるため、速いダイナミクスを持つ機械系に対しても有効なほど高速に計算可能で、且つ安定的に解を求めることができるようになる。さらに、さらにプラントの状態の次元が仮に大きくなるような場合においても、大幅な計算量の増大を抑えることが可能となる
(もっと読む)
干渉力補償制御装置
【課題】可動部間に生じる摩擦力に起因する干渉力を高精度に算出することで、高精度な外乱の推定により、高精度な位置決めを行うことができる干渉力補償制御装置を提供する。
【解決手段】連設されている第一可動部と第二可動部との間において可動部同士の摺動面間に生じる可動部間摩擦力に基づいて干渉力モデルを設定する。第一可動部を駆動する第一アクチュエータに対する第一目標位置指令値110に基づいて第一基準推力指令値を算出する。第二可動部を駆動する第二アクチュエータに対する第二目標位置指令値210と干渉力モデルとに基づいて、可動部間摩擦力の影響により第二可動部の動作に起因して第一可動部の動作に作用する第一干渉力を算出する。そして、第一基準推力指令値と第一干渉力とを加算することにより第一補償推力指令値を算出し、第一補償推力指令値に基づいて第一アクチュエータを制御する。
(もっと読む)
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム
【課題】物体の種々の初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コストで求めることのできる軌道計画システム、及び求めた軌道にしたがって目標状態までの軌道を制御することのできる軌道計画・制御システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、該目標状態に至るまでの状態を枝として、予め区分された状態空間の複数のセルのそれぞれに一つの枝を有する探索木を予め作成する探索木作成部(101)と、該探索木を記憶する探索木記憶部(103)と、該物体の現在の状態を求め、該現在の状態に対応する該探索木の枝を求め、該現在の状態に対応する該探索木の枝から該根までの探索木上の経路を、物体の軌道として求める軌道作成部(105)と、を備える。軌道計画・制御システムは、さらに目標状態までの軌道を制御する軌道制御部(107)を備える。
(もっと読む)
制御器の構成方法、システム及びプログラム
【課題】スケジューリング・パラメータ・ベクトルの各候補について、制御器を自動的に構成するための技法を提供する。
【解決手段】プラントのLPVモデルを記述し、スケジューリング・パラメータ数を与え、複数の要素からなるスケジューリング・パラメータ・ベクトルの各要素には、制約条件の上位要求から出てくる最大値と最小値が与えられ、その各候補について、Min、Max、それらの中間値の各々の間について、νギャップを計算し、νギャップ間の差が大きいものから順番にスケジューリング・パラメータ候補とし、最初に与えられたパラメータ数を選び、LMIに変換し、選定したスケジューリング・パラメータの最大値と最小値に関する全ての組み合わせ端点についてH∞基準によって制御器を求め、パラメータ選定時に計算したνギャップによって重み付けした双一次補間によって一般化プラントへの制御器を構成する。
(もっと読む)
ロボットおよびその行動制御システム
【課題】上体の運動によって指定タスクを実行しながら、継続的に安定することができるロボット等を提供する。
【解決手段】本発明のロボット1または行動制御システム2によれば、確率遷移モデルにしたがって、腕体の運動状態を表わす「第1状態変数」の時系列的な変化態様が、第1状態変数のうち少なくとも1つがロボット1に指定タスクを実行させるための第1指定運動軌道{r}に追従するように生成される。また、同じく確率遷移モデルにしたがって、上体の運動状態を表わす「第2状態変数」の時系列的な変化態様が、第2状態変数が継続的に安定な動力学的条件を充足するように生成される。
(もっと読む)
圧力レギュレータ及び除振装置
【課題】下流側に流量変動が発生した場合においても、高応答かつ高精度に圧力制御を行うことができる圧力レギュレータを提供する。
【解決手段】圧力レギュレータ41は、サーボ弁11によって、気体供給源10から供給される気体の等温化圧力容器13への流入流量を規制し、等温化圧力容器13内の圧力を一定に保持する。ここで、サーボ弁11を操作する圧力制御手段(コンピュータ46)は、圧力計14で計測した等温化圧力容器13内の圧力をフィードバック制御する圧力制御系をメインループとし、その内側に、流入流量を制御する流入流量制御系を構成すると共に、圧力微分計15で計測した等温化圧力容器13内の圧力微分値に基づいて等温化圧力容器13における流入流量と流出流量との差である流入出流量差を推定するオブザーバを構成し、推定した流入出流量差を流入流量制御系にフィードバックするモデル追従制御系を構成する。
(もっと読む)
外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法
【課題】設計者が試行錯誤することなく決定した伝達関数に基づく位相進み補償器と位相遅れ補償器により、共振の位相を安定化させることが可能な外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法を提供する。
【解決手段】
制御対象28に加わる外乱dを推定する外乱オブザーバ21において、外乱オブザーバ21は、制御対象28の共振成分を外乱dの一部として含んだ外乱モデルに基づいて相補感度関数のパラメータが設計されたことを特徴とする。
(もっと読む)
較正方法、較正システム、およびこの較正方法のための記録媒体
【課題】 単純かつ短時間に、物理システムの状態変数のオブザーバの係数を較正する方法を提供する。
【解決手段】 この方法は、状態変数xkの関数である物理システムの変数zkを、相異なるN個の測定時刻において測定するステップ(50)と、あらかじめ定められた制約セットΔを満たしながら、基準式を最小にする係数ベクトルpを特定するステップ(54)とを含んでいる。この基準式は、変数zkと、変数zkの推定値に状態変数xkの推定値をリンクさせる既知関数との差のノルムによって構成されている。制約セットΔの1つまたは複数の制約は、変数zkの軌跡が、測定時刻kの少なくとも大部分において、変数zkの推定値の軌跡の両側に配置された、帯状の不確かさの領域の内部に存在しなければならないということを命ずる。
(もっと読む)
軌道追従制御装置、方法及びプログラム
【課題】制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現する。
【解決手段】スライディング制御の式の中で登場する定数λの値をfとする。また、定数λの値を、制御対象物の状態変数X(t)(例えば位置)、制御対象物の目標とする状態Xd(t)(例えば目標位置)を用いて制御対象物の目標とする状態の一階微分(例えば目標速度DXd(t)/Dt)に応じて適宜修正する。これにより、スライティング制御の式の中で登場する制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)の項を消すことができ、制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現することができる。
(もっと読む)
1 - 20 / 124
[ Back to top ]