
Fターム[5H105GG05]の内容
電気的推進車両の集電装置 (4,133) | 集電装置及び給電装置の監視 (293) | 監視手段及び方法 (184) | 検出変量及び手段 (180) | 光学的変量及び手段 (53)
Fターム[5H105GG05]の下位に属するFターム
テレビカメラを用いるもの (30)
Fターム[5H105GG05]に分類される特許
1 - 20 / 23
移動車両及び非接触電力伝送装置
【課題】大型化、複雑化、及びコスト上昇を招くことなく、大きさやコイルの取り付け位置が異なっていても非接触での電力伝送を効率的に行うことができる移動車両及び非接触電力伝送装置を提供する。
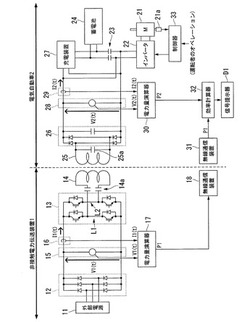
【解決手段】移動車両としての電気自動車2は、移動のための動力を発生するモータ21と、モータ21を駆動する電力を供給する蓄電池24と、外部の給電コイル14から非接触で給電される電力を受電する受電コイル25と、受電コイル25で受電された電力の電力量を示す受電量を求める電力量演算器30と、給電コイル14から給電される電力の電力量を示す給電量が入力される無線通信装置31と、上記の受電量及び給電量を用いて、給電コイル14から受電コイル25への電力伝送効率を求める効率計算器32と、効率計算器32で求められた電力伝送効率に応じて、移動すべき方向を示す信号を提示する信号提示部D1とを備える。
(もっと読む)
電車線位置計測装置

【課題】安価で正確な電車線位置計測装置を提供する。
【解決手段】電車線2のz方向の位置を計測するのに用いられる近接センサ18がパンタグラフ14に配設される。近接センサ18は、隣接する近接センサ18の検出範囲が重なるように、電車線2の付設方向と略平行な面内において千鳥状に2次元配置される。電車線2はz方向の位置を変えながら敷設されるため、工作車10を自走させると反応する近接センサ18が変化する。したがって、どの近接センサが反応したかを把握することにより、電車線2の位置を計測することができる。
(もっと読む)
給電装置搭載車両
【課題】車両本体の給電部が外部の電力供給先に対して位置ずれしている状態であっても、給電部から外部の電力供給先への非接触給電を行うことができる給電装置搭載車両の提供にある。
【解決手段】外部の電力供給先へ電力供給する受給電装置20を車両本体11に搭載した給電装置搭載車両であって、受給電装置20は、非接触給電により外部の電力供給先へ電力供給する給電部を有する非接触ユニット21と、非接触ユニット21の向きを変更可能に、車両本体11に取り付ける非接触ユニット可動機構と、を備え、非接触ユニット可動機構を駆動させるユニット駆動部と、を備え、ユニット駆動部は、非接触ユニット21の向きを前記電力供給先の向きに対向させた。
(もっと読む)
給電システム
【課題】給電側コイルと受電側コイルとの中心軸のずれに起因する伝送効率の低下を抑制し、給電部から受電部へ高効率で電力を供給することができる給電システムを提供する。
【解決手段】給電側ヘリカルコイル7a、7bが2つ設けられている。受電側ヘリカルコイル8は、2つの給電側ヘルカルコイル7a、7bに対してその中心軸方向に対向するように離間して配置されると当該給電側ヘリカルコイル7a、7bと電磁共鳴して給電側ヘリカルコイル7a、7bからの電力が伝送される。CPU11は、2つの給電側ヘリカルコイル7a、7bのうち受電側ヘリカルコイル8に最も近い位置に配置されている1つを近接コイルとして検出し、検出された近接コイルのみ電力を供給するようにスイッチ10a、10bのオンオフを制御する。
(もっと読む)
物体の変位推定方法並びにパンタグラフの接触力推定方法及び装置
【課題】 被測定物や測定装置の測定していない点の変位を推定することで、推定量の誤差を少なくできる物体の変位推定方法を提供する。
【解決手段】 n個の部材rがピンlを回転支点としてX軸方向に連結している物体において、各部材rにマーカー10を貼り付け、X軸方向位置xにおける各マーカー10のY軸方向(X軸に交差する方向)の変位yを一次元センサで計測する。そして、各部材rの両端のピンl通る直線を一次式で表わすとともに、各ピンlの座標を求め、さらに、n−1本目の直線とn本目の直線が交差する条件を表わす。これらの式から、部材rごとの、その両端のピンlを通る直線式を求める。この式から、部材r内の任意の点の変位や、各部材rの傾きを正確に求めることができる。
(もっと読む)
非接触給電設備の2次側受電回路
【課題】効率が良く、低電圧による定電流制御、または定電圧制御が可能な非接触給電設備の2次側受電回路を提供することを目的とする。
【解決手段】同一のコアに巻かれ1次側の給電コイル17より起電力が誘起される第1コイル32および第2コイル33と、第1コイル33と共振回路37を形成する共振コンデンサ38と、共振コンデンサ38の両端を接続状態と開放状態に切り換えるスイッチング素子39と、共振回路37の出力電圧のゼロクロス点を検出するゼロクロス検出回路40と、第2コイル33から出力される電流を電池22へ出力する整流回路41と、電池22へ出力される電流と基準電流とを比較して、駆動パルスのパルス幅を制御し、前記ゼロクロス点に同期してスイッチング素子39ヘ駆動パルスを出力し、電池22へ出力される電流を基準電流に一定に制御する定電流制御機能を有するパルス発生回路45を備える。
(もっと読む)
パンタグラフの離線検知方法及び装置
【課題】蛍光灯、水銀灯、信号灯からの紫外線の影響を排除して、トロリ線とすり板との離線によるアーク光中の紫外光のみを検出できる精度の高いパンタグラフの離線検知方法及び装置を提供する。
【解決手段】(1)水銀灯より短波長の紫外光を選択して測定することによりパンタグラフの離線を検知し、(2)車両の走行位置を示す現在位置データと、外乱光の影響を受ける位置を示す基準位置データとを照合し、照合結果に基づき、外乱光の影響を受ける地点の紫外線を非測定とし、(3)水銀灯より短波長の紫外光を選択して測定することにより離線を検知するとともに、車両の走行位置を示す現在位置データと、外乱光の影響を受ける位置を示す基準位置データとを照合し、照合結果に基づき、外乱光の影響を受ける地点にて離線検知を停止することを特徴とする。
(もっと読む)
車両用給電装置
【課題】電力伝送効率を高く維持することのできる車両用給電装置を提供する。
【解決手段】この車両用給電装置は、系統電源10から送電コイル12への給電に基づきその共振周波数で振動する磁場を形成する。そして、送電コイル12が車両20に設けられている受電コイル21と磁気共鳴することで、系統電源10から送電コイル12に供給される電力を受電コイル21を介して車載バッテリ23に充電する。ここでは、第1及び第2のCCDカメラ14,15を用いて送電コイル12と受電コイル21との間の距離を計測するとともに、計測された各コイル12,21の間の距離に基づき周波数調整部30を通じて送電コイル12の共振周波数を調整する。
(もっと読む)
トロリ線検測装置
【課題】測域センサによる測定誤差を低減することを可能としたトロリ線検測装置を提供する。
【解決手段】車両1の屋根上に設置される測域センサ2と、車両1の内部に設置される演算装置3とを備えるトロリ線検測装置において、測域センサ2の設置角度を、そのスキャン平面が車両1の進行方向に直交する面に対して傾斜角を有するように設定する一方、演算装置3に、測域センサ2の操作を行う制御部31と、測域センサ2によって測定した測定対象物の位置を直交座標に変換した後、予め設定した検出範囲内にある測定対象物のみを抽出してその座標を求める検出範囲抽出部33と、測域センサ2による一回のスキャンにおいて検出される複数の測定対象物の座標からトロリ線候補座標を検出するトロリ線座標検出部35と、トロリ線座標を特定のフォーマットで出力するログ出力部37と設けた。
(もっと読む)
受光装置
【課題】昼夜にかかわらずアーク放電の発生の測定精度を向上させること。
【解決手段】受光装置であって、車内と車外との間に設けられ車外から車内に入射する光のうち可視光を通過させる可視光透過部と、可視光透過部を介して車内に入射する光の光路上且つ車外に設けられ、入射する光のうち紫外線のみを通過させる紫外線通過部と、紫外線通過部と可視光透過部との間に設けられ、紫外線通過部を通過した紫外線を可視光に変換して通過させる可視光変換部と、紫外線通過部と、可視光変換部と、可視光透過部とを介してパンタグラフとトロリ線との接点近傍を臨む方向へ向けて車内に設置され、紫外線通過部と、可視光変換部と、可視光透過部とを介して入射される可視光のみを受光する受光部と、受光部によって受光された可視光を伝送する可視光線領域伝送体と、を備える。
(もっと読む)
移動体の電力供給システム
【課題】移動体へ非接触で電力供給を行うシステムにおいて、運転者が移動体を移動させる際に路面側の給電部と車両側の受電部とを容易に正対させることができるようにする。
【解決手段】車両2の底面には、駐車スペース3の路面に埋め込まれた給電部31から電磁誘導により電力供給を受ける受電部21が設けられている。給電部31から受電部21への電力供給を効率よく行うには、これら各部を正対させる必要がある。そこで、駐車スペース3の後方には、位置決めマーカ18を設置し、車両2側では、運転者が車両2を駐車スペース3に駐車させる際には、位置決めマーカ18をカメラ17で撮像して、撮像画像を表示部8に表示することで、車両2を最適位置に誘導する。また、送信部37bから基準位置信号を送信し、受信部28bにてその基準位置信号を受信できたときに、車両2側から充電希望信号を送信して、電力供給を開始させる。
(もっと読む)
非接触給電装置
【課題】 コアケーシングの位置決めをロボット等により自動で行う場合、コアケーシングの位置決めをさほど正確に行わなくても、また、位置決め用アクチュエータやセンサを必要とすることなしに、分割コア断面の位置決めを正確に行うことができる非接触給電装置を提供する。
【解決手段】 2つの分割コア1より成る給電トランス19の一方のコアを組み込んだ1次コアケーシング13と、もう一方のコアを組み込んだ2次コアケーシング14と、1次コアケーシング13を組み込んだ1次側給電ユニット22と、2次コアケーシング14を組み込んだ2次側給電ユニット23とを備えた非接触給電装置において、給電トランス19を形成する際の位置決め用構造体として、1次コアケーシング13に台形状の板11を設け、かつ、2次コアケーシング14に板11をはめ込むための台形状の溝12を設けた。
(もっと読む)
給電装置、集電装置及び磁気誘導充電式電気自動車用安全システム
集電装置が道路上に存在する障害物と衝突して損傷するのを防止すると共に、左右偏差許容値を最大化させ、集電装置と集電装置間の間隙を最小化させて電力伝達効率を増加させる磁気誘導充電式電気自動車用給電装置と集電装置が提供される。 (もっと読む)
パンタグラフ昇降制御装置
【課題】蓄電池搭載電車において、充電が未了となること及びパンタグラフ、架線、及び道路設備建築物を破損してしまうことを防ぐ。
【解決手段】本発明のパンタグラフ昇降制御装置は、パンタグラフの上昇と下降を行うパンタグラフアクチュエータを制御する。昇降信号生成部が、架線検知部から架線の存在を検知することを示す架線検知信号を受け、停車判断部から車両が停止状態であることを示す停車判断信号を受け、力行判断部から力行ノッチがゼロであることを示す力行ノッチ判断信号を受け、充電要求判断部から充電要求信号が充電要求をするものであることを示す充電要求判断信号を受け、且つパンタグラフ位置センサからパンタグラフの高さ位置が第1の設定高さより小さいことを示すパンタグラフ低位置信号を受けたとき、パンタグラフアクチュエータに対して、パンタグラフ上昇信号を出力する。
(もっと読む)
パンタグラフ型集電装置の検査装置及びパンタグラフ型集電装置の検査方法
【課題】本発明は、安価にてすり板の正確な摩耗量や荒損位置を測定できるパンタグラフ型集電装置の検査装置を提供することにある。
【解決手段】本発明は、停止中の電車1のすり板4の表面に、ビームを連続的に照射してすり板4の表面形状データ33を取得し、この取得された表面形状データ33と予め取得しておいた設計データとを比較してすり板4の摩耗量を求めるようにしたのである。
このようにビームをすり板4の表面に連続的に照射して測定することで、正確な摩耗量や荒損位置を測定することが可能となり、しかも高価なビームセンサ10を複数用いる必要がなくなるので、すり板4の正確な荒損や荒損位置を安価に測定できるパンタグラフ型集電装置の検査装置を得ることができる。
(もっと読む)
紫外線検出装置及び離線検出記録計
【課題】太陽光及びノイズに影響されずに離線による放電現象を検出できる紫外線検出装置及び離線検出記録計を提供する。
【解決手段】紫外線検出装置100は、紫外線検出部10が、紫外線領域の波長を検出感度領域とする紫外線検出管11を備える。パルス発生部20は、複数の紫外線検出部10の検出時刻を同期させる。AND回路30は、検出時刻を同期して複数の紫外線検出部10によって検出された信号の論理積による演算結果を出力する。離線検出記録計200は、画像同期記録計51が、紫外線検出装置100の出力情報及びビデオカメラ54が撮像した映像をGPS端末53が出力する現在位置データに関連させて記録する。パルスカウンタ41は、紫外線検出装置100の出力情報を計数し、パルス計数記録装置43によって計数結果を記録する。
(もっと読む)
画像処理によるパンタグラフの水平加速度測定装置および測定方法
【課題】非接触でパンタグラフの水平加速度を測定することを可能とした画像処理によるパンタグラフ水平加速度測定装置および測定方法を提供する。
【解決手段】車両に取り付けたラインセンサカメラ1でパンタグラフを撮像し、画像処理部2により撮像された画像に基づいてパンタグラフの水平加速度を測定する装置において、画像処理部2に、ラインセンサカメラ1によって撮像した画像を入力する画像入力部21と、ラインセンサカメラ1によって撮像した画像を処理することによってラインセンサ画像上のパンタグラフの位置を求めるパンタグラフ位置検出部23と、ラインセンサ画像上のパンタグラフの位置に基づきパンタグラフ水平加速度を算出するパンタグラフ水平加速度算出部24とを設けた。
(もっと読む)
パンタグラフの離線検知方法及び装置
【課題】 安価な手段で、昼夜に係らずパンタグラフの離線を検知できる装置及び方法を提供する。
【解決手段】 パンタグラフ離線検知装置1は、パンタグラフPの近傍に設置された紫外光受光部10と、車両Vの内部に配置された光量測定器21と、から主に構成される。紫外光受光部10と光量測定器21とは、プラスチックファイバ30で接続している。紫外光受光部10は、アーク光の所定の波長以下の紫外光成分を通過させるフィルタ12と、フィルタ12を通過した紫外光を可視光に変換する蛍光ガラス13を有する。フィルタ12を使用して所定の波長以上の非紫外光成分を取り除くことにより、アーク光に含まれる紫外光を、太陽光に対して高い割合で検出できる。そして、この紫外光を蛍光ガラス13で可視光に変換することにより、光を伝達するケーブルとしてプラスチックファイバ30を使用できる。
(もっと読む)
パンタグラフの離線測定方法及び装置
【課題】簡易な構成で昼夜を問わずにパンタグラフの離線を測定することができる方法及び装置を提供する。
【解決手段】パンタグラフ67の離線測定装置1は、トロリ線65とパンタグラフ67の間に発生するアーク光SLを集光する紫外線透過レンズ11と、集光したアーク光を受光して電気信号に変換する光電変換素子13とを備える。該素子は、紫外線のみを光電変換する。これにより、該測定装置は、車両が走行する線路から離れた地上に設置されていても、該線路を走行する全ての車両におけるパンタグラフの離線を高精度に測定することができる。さらに、該測定装置は、太陽光の影響を排除することができ、日中・夜間を問わずにパンタグラフの離線を測定することができる。
(もっと読む)
荷重測定装置及びすり板の接触力測定装置
【課題】狭い空間内に簡単に設置可能であり改造が容易で測定精度を向上させることができる荷重測定装置及びすり板の接触力測定装置を提供する。
【解決手段】接触力測定装置24は、すり板片12aとトロリ線1aとの間に作用する接触力Cを測定する装置である。荷重受け部26は、すり板片12aから接触力Cを受ける部分であり、すり板片12aと弾性支持部22との間に着脱自在に装着されている。受け部側接触部26aは、すり板側接触部25から接触力Cを受けて弾性変形する部分であり、装着部26bはすり板片12aと弾性支持部22との間に間隙部Δを形成するように、これらの間に着脱自在に装着される部分である。荷重検出部27は、荷重受け部26に作用する接触力Cを検出する部分であり、受け部側接触部26aの歪みに応じて反射光の波長が変化する光ファイバ式の歪みゲージを備えている。
(もっと読む)
1 - 20 / 23
[ Back to top ]