
Fターム[5H105GG11]の内容
電気的推進車両の集電装置 (4,133) | 集電装置及び給電装置の監視 (293) | 監視対象及び現象 (109)
Fターム[5H105GG11]の下位に属するFターム
Fターム[5H105GG11]に分類される特許
1 - 6 / 6
電気自動車
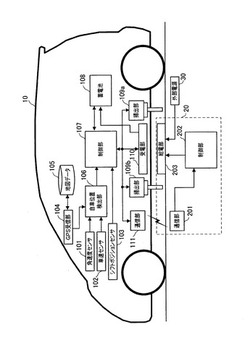
【課題】充電開始前から既に給電コイル上に存在している異物を除去すること。
【解決手段】
電気自動車10において、車両の底面に配置された受電部110は、地面に設置された給電部203から非接触で電気エネルギを供給され、蓄電池108は、電気エネルギを蓄積し、車両の底面に配置された掃出部109a,109bは、収納状態と掃出可能状態との間を可動であり、掃出可能状態において給電部203上の異物を掃き出し、制御部107は、車両と給電部203との間の距離が閾値未満になった場合に、掃出部109aまたは掃出部109bを収納状態から掃出可能状態に移動させる。
(もっと読む)
パンタグラフの動特性の異常検出方法

【課題】 パンタグラフの動特性の異常によって影響を受けるトロリ線の挙動を監視することによって、パンタグラフの異常(動特性異常)を検出する方法を提供する。
【解決手段】 トロリ線Tのモニター位置P1には加速度計30が取り付けられており、トロリ線Tの上下加速度が検知される。監視されるパンタグラフ1がモニター位置P1を通過する際のトロリ線の振動(監視振動という)を加速度計30で測定する。一方、このパンタグラフが、正常な状態において、モニター位置P1を通過する際のトロリ線の振動(参照振動という)を加速度計30で測定しておく。そして、参照振動と監視振動とを比較して、運行状態におけるパンタグラフの動特性が正常であるか異常であるかを検出する。
(もっと読む)
非接触充電システム
【課題】車両への非接触式充電を行う際に、人体、動物等の電磁界からの影響を低減することができる非接触充電システムを提供する。
【解決手段】非接触充電システムは、車両3に設けられる車両側の受電コイル21と車両外部の地上側充電装置10に設けられる地上側の送電コイル11との間でワイヤレスで送電を行い、車両3の二次電池23に地上側充電装置10からの電力を充電する。非接触充電システムは、非接触充電を実施するときに、または実施前の待機段階で、送電コイル11を覆う地上側パッド1及びその周辺から、人体、動物を含む排除すべき排除対象物を排除する排除手段を備える。当該排除手段は、地上側パッド1の外表面を上方に膨らむドーム形状に形成することにより構成される。
(もっと読む)
車両用充電支援装置、車両用充電支援方法、コンピュータプログラム
【課題】現在位置からの位置変更を勘案し、現在位置での充電と、位置変更を行い充電効率の良い位置での充電との比較材料を提示可能な車両用充電支援装置、車両用充電支援方法及びコンピュータプログラムを提供する。
【解決手段】ナビゲーション装置1は、現在位置で目標充電量Etまで充電する為に必要な第1充電期間Taを算出する(S6)。更に、ナビゲーション装置1は、現在位置から最適位置への移動に要する消費電力量Ec及び位置変更期間Tcを算出する。又、ナビゲーション装置1は、移動完了時残量Efから目標充電量Etまでの充電に要する最適充電期間Toと、位置変更期間Tcを合算した第2充電期間Tbを算出する(S11)。ナビゲーション装置1は、第1充電期間Taと、第2充電期間Tbの比較結果に基づいて、充電位置案内画面80を表示する(S13、S14)。
(もっと読む)
非接触受電装置およびそれを備える電動車両
【課題】受電電力を電気負荷へ供給する電路を遮断可能なリレーの溶着チェックを確実に行なうことができる非接触受電装置およびそれを備える電動車両を提供する。
【解決手段】リレー144は、整流器140とDC/DCコンバータ142との間の電力線対に設けられる。電圧センサ190は、抵抗146に生じる電圧VR1を検出する。電圧センサ192は、リレー144よりもDC/DCコンバータ142側において電力線対間の電圧VR2を検出する。そして、リレー144,148がそれぞれオフ,オンされているとき、電圧センサ190,192の検出値が比較され、その比較結果に基づいてリレー144の溶着有無が判定される。
(もっと読む)
画像処理によるパンタグラフの水平加速度測定装置および測定方法
【課題】非接触でパンタグラフの水平加速度を測定することを可能とした画像処理によるパンタグラフ水平加速度測定装置および測定方法を提供する。
【解決手段】車両に取り付けたラインセンサカメラ1でパンタグラフを撮像し、画像処理部2により撮像された画像に基づいてパンタグラフの水平加速度を測定する装置において、画像処理部2に、ラインセンサカメラ1によって撮像した画像を入力する画像入力部21と、ラインセンサカメラ1によって撮像した画像を処理することによってラインセンサ画像上のパンタグラフの位置を求めるパンタグラフ位置検出部23と、ラインセンサ画像上のパンタグラフの位置に基づきパンタグラフ水平加速度を算出するパンタグラフ水平加速度算出部24とを設けた。
(もっと読む)
1 - 6 / 6
[ Back to top ]