
Fターム[5H115PA12]の内容
車両の電気的な推進・制動 (204,712) | 目的 (11,912) | 省エネ (2,964) | 燃費の向上 (1,542)
Fターム[5H115PA12]に分類される特許
1 - 20 / 1,542
ダンプトラックの荷台加熱機構
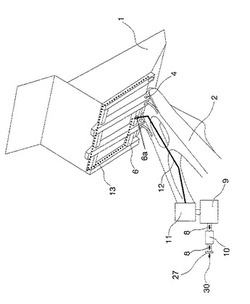
【課題】排気ガスの熱を利用しなくても荷台に積荷が付着することを抑制すると共に、荷台の重量が増加することを抑えることができるダンプトラックの荷台加熱機構の提供。
【解決手段】起伏可能に設けられた荷台1と、制動時に動作させる発電機11と、この発電機11に接続された抵抗器とを有し、発電機11の回生起電力を抵抗器によって消費することで制動力を得る電気駆動式のダンプトラック1Aに備えられ、荷台1を加熱する荷台加熱手段を有するダンプトラック1Aの荷台加熱機構において、荷台加熱手段は、荷台1に設けられた電熱線13を含み、この電熱線13は、抵抗器の一部から構成される。
(もっと読む)
ハイブリッド車両の制御装置

【課題】無段変速モードを実現可能なハイブリッド車両において燃費を向上させる。
【解決手段】ハイブリッド車両の制御装置(100)は、無段変速モードを実現可能なハイブリッド車両(1)の制御装置であって、内燃機関(200)の回転数及びトルクに基づいて最適熱効率を算出する最適熱効率算出手段(110)と、内燃機関の回転数及び要求パワに基づいて推定熱効率を算出する推定熱効率算出手段(120)と、最適熱効率及び推定熱効率の熱効率差を算出する熱効率差算出手段(130)と、熱効率差が所定の閾値以上であるか否かを判定する判定手段(140)と、熱効率差が所定の閾値以上である場合には、内燃機関の回転数を最適燃費線上の回転数になるよう制御し、熱効率差が所定の閾値以上でない場合には、内燃機関の回転数を保持するように制御する回転数制御手段(150)とを備える。
(もっと読む)
ハイブリッド自動車用冷却システム
【課題】インバータの信頼性低下を抑制し得るハイブリッド自動車用冷却システムを提供する。
【解決手段】サーモスタット24は、ラジエータ経路30と冷却水循環路10とを連通させない状態と、ラジエータ経路30と冷却水循環路10とを連通させる状態とを切り替える。ECU34は、ポンプ26の回転数を制御することにより、冷却水循環路10内を循環する冷却水の単位時間当りの流量を増減させることができる。ECU34は、サーモスタット24が、ラジエータ経路30と冷却水循環路10とを連通させない状態である場合における、冷却水循環路10内を循環する冷却水の単位時間当りの流量を、サーモスタット24が、ラジエータ経路30と冷却水循環路10とを連通させない状態である場合における冷却水の単位時間当たりの流量より多くするように制御する。
(もっと読む)
手動変速機
【課題】HV−MT車用の手動変速機であってコンパクトなものを提供すること。
【解決手段】 この変速機は、内燃機関から動力が入力される入力軸Aiと、電動機から動力が入力される出力軸Aoとを備える。この変速機は、動力伝達系統がAi−Ao間で確立されない(ニュートラルとは異なる)EV走行用の変速段(EV)と、動力伝達系統がAi−Ao間で確立されるHV走行用の複数の変速段(2速〜5速)とを有する。変速段の選択・確立を行うための複数のスリーブS1〜S3のうちの1つ(特定スリーブS1)が、「EV」と「2速」の確立のために割り当てられる。シフトレバーSLをN位置から「2速のシフト完了位置」に移動する場合、特定スリーブS1が「中立位置」から「2速位置」に移動して「2速」が確立される。一方、シフトレバーSLをN位置から「EVのシフト完了位置」に移動する場合、特定スリーブS1が「中立位置」から移動しない。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 連続変速時であってもショックを回避可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータとの間の駆動力の伝達を断接する第1クラッチと、モータから駆動輪へ伝達される駆動力の伝達を断接する第2クラッチと、自動変速機の変速中に、第2クラッチをスリップ状態とするスリップ制御手段と、を備えたハイブリッド車両の制御装置において、スリップ制御手段は、現在の変速と次の変速とを連続で行う連続変速中に、現在の変速が終了した後、かつ、次の変速が終了する前に第2クラッチのスリップ状態を完全締結状態に移行させる場合には、第2クラッチの締結圧を徐々に上昇させることとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンの動作点の移動及び機械式変速機構の変速制御を同時に行う過程で、燃費の悪化を抑制しつつ好適な変速を実現する。
【解決手段】エンジン動作点の移動及び自動変速機18の変速制御を同時に行う過程で、3つの回転要素CA0,S0,R0のうちの1つの回転速度が他の回転速度と変化方向が異なる場合には、動力伝達装置11における入力パワー(例えばエンジンパワー)よりも自動変速機18における駆動伝達パワーが大きくされるので、3つの回転要素CA0,S0,R0の回転速度の回転方向に拘わらず変速中のパワー収支を安定させることができる。よって、エンジン動作点の移動及び自動変速機18の変速制御を同時に行う過程で、燃費の悪化を抑制しつつ好適な変速を実現することができる。
(もっと読む)
車輪駆動装置
【課題】空走状態における電力消費を低減できるようにした車輪駆動装置を提供する。
【解決手段】電動モータ11と、電動モータの回転を減速し、トルク増大して駆動車輪12に伝達する遊星ギヤ機構13と、遊星ギヤ機構のリングギヤ22の回転を自由状態または固定状態にするクラッチ機構14と、通常はリングギヤを固定状態に保持し、車両の空走時を検出してリングギヤの回転を自由状態にするようにクラッチ機構を制御するクラッチ制御手段40とを有する。クラッチ制御手段は、例えば、電動モータによって駆動される電動モータ冷却用ポンプより吐出される冷却オイルの圧力、あるいは電動モータとは別に設けたモータによって駆動されるねじ機構によって駆動される。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車にて、実際のクラッチトルク特性の変化によってクラッチ操作部材の操作に対する「駆動輪に伝達される駆動トルク」の推移に変化が発生することの抑制。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。クラッチトルク基準特性(マップ)にクラッチ戻しストローク検出値を適用してクラッチトルク基準値が決定される。このクラッチトルク基準値と「EGの出力軸の駆動トルク検出値」とのうちで小さい方の値が「CT通過後基準EGトルク」として決定される。MGトルクは、CT通過後基準EGトルクから、M/Tの入力軸の駆動トルク検出値(CT通過後実EGトルク)を減じた値に調整される。これにより、CT通過後EGトルクの誤差が補償され得る。
(もっと読む)
建設機械
【課題】HSTモータおよび走行電動モータによって制駆動する建設機械においては、停止状態から急加速を行う場合に、エンジンをアシストするために、蓄電装置から発電電動機を介してエンジン軸に伝えられた出力が、HSTポンプへの動力として吸収されてしまい、エンジンの加速が遅れる可能性があった。また、蓄電装置からの出力は、発電機やHSTポンプ等を介した後に走行動力として得られるため、駆動効率が低下するという課題があった。
【解決手段】本発明の建設機械は、エンジンをアシストする発電電動機が電動機動作を行う場合に出力されるアシスト要求出力と、HSTモータおよび/または走行電動モータのモータ回転数とに基づいて、走行電動モータを駆動するために出力される電動走行トルク指令およびHSTモータを駆動するために出力されるHST走行トルク指令を算出する制御手段を有することを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ノーマル運転パターンと判定される通常運転中でも、運転者が高応答運転モードを選択すると、ハイブリッド走行領域を拡大する。
【解決手段】高応答運転モードModehr選択中であって、動力性能重視運転パターンPat(PWR)および燃費重視運転パターンPat(ECO)の中間的なノーマル運転パターンPat(NOR)である場合、エンジン始動線として中間用エンジン始動線を選択し、Modehr選択中にノーマル運転パターンPat(NOR)である場合のハイブリッド走行領域を、燃費重視運転パターンPat(ECO)でのハイブリッド走行領域よりも拡大させる。このため、Pat(NOR)と判定される通常運転中でも、運転者がModehrを選択すると、エンジン動力を用いたハイブリッド走行が行われ易くなる。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
経路探索装置、経路探索方法及び経路探索プログラム
【課題】走行時に回生エネルギを発生可能な車両に対して、エネルギの推定消費量を少なくすることを優先条件とした経路を提供することができる経路探索装置、経路探索方法及び経路探索プログラムを提供する。
【解決手段】サーバー装置のサーバー制御装置は、車両の駆動方式を取得し(ステップS20:YES)、目的地までの走行に伴う車両における化石燃料の推定消費量を少なくすることを優先条件としてルート候補を探索する(ステップS21)。サーバー制御装置は、複数のルート候補が探索された場合(ステップS22:YES)、車両で回生エネルギを発生させやすい推奨道路特性を取得し、該推奨道路特性に基づき各ルート候補のうち何れか一つのルート候補を選択し、該ルート候補を目的地までのエコルートとして提供する(ステップS25,S26,S27,S28)。
(もっと読む)
ハイブリッド車両用電動モータ駆動装置及び該装置を備えたハイブリッド車両
【課題】 簡単かつ安価で軽量コンパクトな構成でありながら、既存の自動二輪車等の車両の動力伝達系に対して変更を伴うことなく、良好に電動モータの出力を駆動力として作用させることができるハイブリッド車両を提供する。
【解決手段】 本発明に係るハイブリッド車両は、内燃機関2と電動モータ20とを動力源として備えるハイブリッド車両1であって、電動モータ20により車輪11に駆動力を付与する電動モータ駆動装置10が、車輪11の車軸と略平行な回転軸廻りに回転可能に構成され、少なくとも1つの車輪11の外周付近に当接する駆動ローラ15と、駆動ローラ15を駆動する電動モータ20と、を含んで構成されることを特徴とする。
(もっと読む)
パラレル式ハイブリッド車両走行制御装置
【課題】ドライバの違和感が解消され、しかも、燃費向上の効果が大きくできるパラレル式ハイブリッド車両走行制御装置を提供する。
【解決手段】エンジン回転速度が回生下限値以上回生上限値未満で、かつ、ドライバ要求トルクと回生可能トルク最大値の加算値が好適熱効率トルク下限値を超えているとき、前記加算値がエンジン熱効率最大のトルク上限値を超えていれば、トルク上限値をエンジン目標トルクとして設定し、前記加算値がエンジン熱効率最大のトルク上限値以下であれば、前記加算値をエンジン目標トルクとして設定し、そのときのエンジン発生トルクからモータ回生トルクを取り出してバッテリ4を充電しつつ走行する充電走行を行うエネルギマネジメント部5を備える。
(もっと読む)
シリーズハイブリッド車両のエンジン制御装置
【課題】エンジンと発電機とバッテリと駆動モータとを備えたシリーズハイブリッド車両のエンジン制御装置において、燃費効率を向上するとともに、ドライバビリティも向上することにある。
【解決手段】エンジン制御装置(11)には、車速を検出する車速検出手段(13)を設け、アクセル操作量を検出するアクセル操作量検出手段(14)を設け、車速検出手段(13)により検出された車速とアクセル操作量検出手段(14)により検出されたアクセル操作量とに基づいてエンジン回転数を制御する制御手段(12)を設けている。
(もっと読む)
列車制御システム
【課題】ハイブリッド鉄道車両において、エンジン出力を充電してから駆動力に利用するような、充電放電の二重損失伴う出力プロセスを回避するために、バッテリの放電は発車から制限速度まで等大きな駆動力を必要な時に使用し、大きな駆動力は不必要でありエンジンのみの出力で走行可能な惰行再力行走行中の充放電を抑止する。
【解決手段】エンジン101とバッテリ102と、エンジン101とバッテリ102からの出力を車輪の力に変換する駆動装置103と、バッテリ102に対する出力指令とエンジン101に対する出力指令を出力する駆動制御装置104とを備える列車制御システムにおいて、駆動制御装置104は速度履歴から惰行再力行走行を検知し、惰行再力行走行状態を検知した場合に、エンジン101に対して駆動装置103が出力する駆動力分の出力を指令し、バッテリ102に対して出力0を指令することを特徴とする駆動制御装置を備えた。
(もっと読む)
車両の制御装置
【課題】蓄電装置を搭載し外部充電が可能な車両において、蓄電装置を構成するセルの電圧を検出する検出部の診断を確実に実行する。
【解決手段】外部充電が可能な車両100のECU300は、蓄電装置110のSOCを演算するためのSOC演算部310と、蓄電装置110内の複数のセルCL1〜CLnの各々についての電圧を検出する検出部DT1〜DTnの自己診断を実行する判定部330と、充電装置200を制御するための充電制御部350とを備える。判定部330は、SOCが基準範囲内であるときに自己診断を実行することができるように設定され、外部充電の実行中にSOCが基準範囲内となった場合に、充電動作を一時的に中断して自己診断を実行する。
(もっと読む)
回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラム
【課題】電動機の回生トルクを制動力として利用する際のドライバビリティを向上させること。
【解決手段】電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する減速度比較部32と、電動機が最大の回生トルクを発生しているにも係わらず減速度比較部32の比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する回生制御部30と、を有するハイブリッド自動車を構成する。
(もっと読む)
ハイブリッド車両の充電量制御装置
【課題】ハイブリッド車両の走行開始前に空調装置を作動させる場合でも、そのときにエンジンを始動して空調装置の作動用の電気エネルギーを生成する必要性を低下させる。
【解決手段】充電量制御装置は、学習処理において、走行前空調運転を行う場所として登録場所を記録し、当該登録場所で走行前空調運転を行う前に当該登録場所で車両を駐車する時刻を登録時刻Bとして記録する。また、車両が当該登録場所を含むエリアの外から中に入ったことに基づいて、当該登録時刻Bを含む制御対象時間帯を算出し、車両が当該エリアの外から中に入った進入時刻が、当該制御対象時間帯内に入っているか否かを判定し(320、330、340)、入っていると判定した場合、バッテリの充電量が第1範囲内に収まるよう制御されている状態から、バッテリの充電量が第1範囲内よりも上限および下限が大きい第2範囲内に収まるよう制御する(350)。
(もっと読む)
電動車両の制御装置
【課題】ユーザによってブレーキ操作がなされる状況下、車両の運動エネルギをモータジェネレータ10の発電エネルギに変換して高圧バッテリ48(第1バッテリ)を充電する主機回生制御処理が行われる電動車両がある。この車両において、主機回生制御処理を適切に行うことができず、車両の運動エネルギを有効に利用することができないおそれがあること。
【解決手段】主機回生制御処理が行われる状況下において、車両の運動エネルギをコンプレッサ30の駆動エネルギ及びオルタネータ18の発電エネルギに変換し、蓄熱器34に蓄熱したり、低圧バッテリ40(第2バッテリ)を充電したりする処理である補機回生制御処理を行う。
(もっと読む)
1 - 20 / 1,542
[ Back to top ]