
Fターム[5H115PG06]の内容
車両の電気的な推進・制動 (204,712) | 車両の種類 (12,614) | 電気自動車(ハイブリッド車を含む) (11,291) | 電動車椅子 (106)
Fターム[5H115PG06]に分類される特許
1 - 20 / 106
電動車両
【課題】電動車両の各車輪を個別に駆動・制動・操舵等を行うことにより、運転者が意のままに車両の挙動をコントロールし、いわば「人馬一体」の運転が実現できるようにすることである。
【解決手段】左右又は前後に配置された一対の車輪13、前記車輪13を駆動するモータ16、ブレーキ装置18、操舵装置19及び前記各装置のコントローラ21を備えた電動車両において、前記モータ16、ブレーキ装置18、操舵装置19及びコントローラ21が車輪13ごとに個別に設けられた構成とした。
(もっと読む)
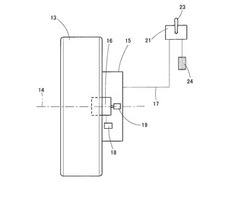
全方向移動型電動車両およびその制御方向

【課題】障害物回避動作を行う全方向移動型電動車両は、操作した方向と異なる方向に動作するため、操作者に対し強い違和感や不安感を抱かせるという問題がある。
【解決手段】車体部14と、操作者が操作した操作方向および操作量を検出する車体部14に設けた操作入力部13と、障害物までの距離および方向を検出する障害物センサ18と、操作入力部において検出される操作方向および操作量により操作力を算出する操作力推測部17と、障害物センサ18が検出した障害物までの距離に反比例し、かつ、障害物と反対方向に作用する仮想斥力を算出する仮想斥力算出部19と、操作力および仮想斥力の和より合力を算出する合力算出部20と、車体部14を操作力の方向から合力の方向へ回転させながら、合力の方向へ移動するよう制御する制御部21とを備えた構成である。
(もっと読む)
電動車両の充電方法、及び、充電ガン用アダプタ
【課題】電動車両との通信機能を有さない普通充電設備によって、通信機能付の電動車両を充電できるようにする。
【解決手段】通信機能付きの第2電気自動車20Bに付属の充電ケーブル30Bと通信機能を有さない普通充電設備10Aの充電ガン12Aとを、充電ガン用アダプタ40を介して電気的に接続する。また、第2電気自動車20Bの充電インレットに、充電ケーブル30Bの充電アウトレット33Bを接続する。そして、充電ガン12A、充電ガン用アダプタ40、及び充電ケーブル30Bを介して第2電気自動車20Bの車載充電器へ単相低圧電源を供給し、車載充電器に接続された駆動用バッテリーを充電する。
(もっと読む)
バッテリパック
【課題】簡単な構造としながら、放電コネクタに雨水が浸水しても、浸入する雨水に起因するショート等の弊害を確実に防止する。簡単な構造で、充電コネクタからの雨水の浸入を確実に防止する。
【解決手段】バッテリパックは、複数の電池1を直列と並列に接続して収納してなる外装ケース40と、この外装ケース40に設けられて、内蔵する電池1を充電する充電コネクタ70を備えている。充電コネクタ70は、外装ケース40の側面に配設されると共に、この側面を下方に向かって対向面に接近するアンダーカット面52として、充電コネクタ70の端子挿入部70Aが水平よりも下方を向く姿勢で配置している。
(もっと読む)
階段昇降式移動車
【課題】階段を安定性良く昇降できる階段昇降式移動車を提供する。
【解決手段】リンク駆動手段が、4節リンク機構式の車輪支持体SLにおける4つのリンク連結箇所が直線状に並ぶ直線姿勢のときに4つのリンクL1〜L4のうちの進行方向前方側に位置する2つのリンクの1つを基準とした状態で、そのリンクに対して平行姿勢を維持するリンクを上方側に回動させたのち前方側に回動させて直線姿勢となるように操作するリンク回動駆動、並びに、4つのリンク連結箇所が直線状に並ぶ直線姿勢のときに4つのリンク連結箇所のうちの前後方向の中間に重複して位置する2つのリンク連結箇所を中心とする状態で、進行方向前方側に位置する2つのリンクと進行方向後方側に位置する2つのリンクとを屈伸操作するリンク屈伸駆動を行うように構成されている。
(もっと読む)
電動車いす
【課題】乗員が容易に操作することができる操作性に優れた電動車いすを提供する。
【解決手段】ハンドルの操作により車輪2a,2bの駆動を制御し、電動車いす1の進路方向を調整できるようにしたことで、乗員が容易に電動車いす1の操作を行えるようにし、また、ハンドルを電動車いす1の肘掛け3にヒンジを介して跳ね上げ可能に設けた操作装置4に組み込んだことで、乗員が電動車いす1に乗り降りする際に邪魔にならないようにした。
(もっと読む)
電動車椅子
【課題】側溝近傍や駅のプラットホーム走行時に、側溝や線路上への転落を警告することによって、安全な操作を容易行える電動車椅子を提供する。
【解決手段】自車に取り付けた距離センサによって、自車と走行路面までの距離を計測し、その計測結果を基に、自車近傍の段差を検知して、乗員へ警告あるいは走行禁止の判断を行うことによって、凹段差への転落の危険性を軽減できるため、駅のプラットホーム上などにおいても電動車椅子を安全に操作さすることが容易となる。
(もっと読む)
電動車両、施設内誘導システムおよび施設内誘導方法
【課題】施設内において、周囲の人物に配慮した自動搬送を行い得ると共に、操作が容易な電動車両、施設内誘導システムおよび施設内誘導方法を実現する。
【解決手段】病院などの施設内において、目的の部屋まで患者を搬送する電動車椅子1であって、目的の部屋を特定するための診察情報が記録された診察券2を読み取る記録媒体読み取り部18と、診察情報に基づいて、車椅子本体を目的の部屋まで移動させるための移動情報を生成する移動情報生成部19と、移動情報に基づいて、車椅子本体を移動させる移動制御部20と、移動制御部20により特定された現在位置と、移動情報に基づいて、車椅子本体の移動方向を投写表示する投写表示部21と、を備えた。
(もっと読む)
車椅子の補助駆動装置
【課題】車椅子の補助駆動装置の提供。
【解決手段】本車椅子の補助駆動装置は、有線信号伝送構造、センサ、制御回路及び駆動ユニットを包含する。該有線信号伝送構造はハブに設置され、且つハブは車椅子の車輪に設置され、該センサは該車輪に設置され、並びに検出信号を発生して該有線信号伝送構造に送り、該制御回路は該有線信号伝送構造に接続され並びに検出信号を受け取り制御信号を発生し、該駆動ユニットは該制御回路に接続され並びに制御信号を受け取り、制御信号に基づきハブを駆動し回転させて車輪を回転させ、これにより、本発明は構造が簡単で、有線方式で信号伝送し、外界環境の干渉を受けにくく、確実に検出信号を制御回路に送り、正確に駆動ユニットを制御して車輪を駆動させられ、且つ有線伝送方式によりコストダウンできる。
(もっと読む)
小型電動車両
【課題】雨水等への対策を図った上でシートの下方の格納スペースを有効に利用できるようにする。
【解決手段】リアカバー7を構成する左右の側面カバー18及び後面カバー19はシートクッション15の側面の下部及びシートバック16の背面の下部を外側から覆うかたちとなっている。左右の側面カバー18には、上縁部18a付近から内側に垂下する垂下面22が設けられており、その垂下面22の下縁部には車幅方向内側に延出する樋部23が形成され、また、後面カバー19にも同様の樋部23が形成される。シート6の両側面や後面とリアカバー7の上縁部との間から雨水等が浸入したときにも、雨水等は後部の樋部27及び両側部の樋部23を流れ、排水溝24を経て排水穴25から排水される。
(もっと読む)
電動型車椅子管理システム
【課題】電池の残量を精度良く監視し、ユーザに知らせるとともに、電池の交換時期や、電池切れに対する救助などの一元管理や電動型車椅子や電動カート、電動フォークリフトなどの衝突防止をする。
【解決手段】充放電を繰り返し使用可能な様々な二次電池が電源として採用されている。ユーザ側200の構成は、それらの充放電の状況をリアルタイムでユーザに知らせることができ、移動先で電池が放電しきった状態においてもGPS16でサービス提供者100が追跡しているので、現地に急行し充電済みの電池との交換や補充電をすることができる。また、GPS16の位置情報監視により電動型車椅子や電動カート、電動フォークリフトの衝突を防止する。
(もっと読む)
電動車椅子の制御装置
【課題】駆動キャスタを備える電動車椅子の制御装置において、電動車椅子の移動方向の変更における応答性を高めることができる制御装置を提供する。
【解決手段】制御装置10が制御する電動車椅子は、駆動キャスタ3と、駆動キャスタ3の駆動方向を検出する駆動方向検出手段103と、目標移動方向を指示する移動方向指示手段8とを備える。そして、制御装置10は、電動モータ70に制御電流を供給する出力手段22と、駆動方向と目標移動方向との差異である差分角度の大きさが90以上である場合には、差分角度に180°を加減算した角度を回転角度とし、車輪の方向を回転角度分回転させることを出力手段22に指令するとともに、車輪(91,92)の回転駆動の方向を目標移動方向が指示される前と逆にすることを出力手段22に指令するキャスタ動作指令手段16を備える。
(もっと読む)
倒立振子型移動体の制御装置
【課題】消費電力を抑えることができて、かつ、使用を中断した後に再開するまで時間がかかることがない倒立振子型移動体を提供する。
【解決手段】基体9と、車輪を有する移動部5と、移動駆動部31R,31Lとを有する倒立振子型移動体の制御装置において、基体の傾斜角度または傾斜角速度を検出する傾斜センサ52と、移動駆動部を制御する制御部50とを有していて、電源モードとして、通常モードと、スタンバイモードとを有していて、電源モードをスタンバイモードに移行させるためのスタンバイスイッチを有していて、制御部は、電源モードが通常モードであるときに、スタンバイスイッチがオンされた場合には、電源モードをスタンバイモードに移行させ、電源モードがスタンバイモードであるときに、傾斜センサによって検出された傾斜角度または傾斜角速度が所定の傾斜許容値を超えた場合には、電源モードを通常モードに移行させることを特徴とする。
(もっと読む)
倒立型走行装置および走行装置の制御方法
【課題】同軸二輪車を提供する。
【解決手段】倒立型走行装置は、指令部からの走行速度指令値で倒立走行を行うための目標指令値を生成する調整目標生成部100と、調整目標生成部100にて生成された目標指令値とセンサによる検出結果との偏差に基づいて走行制御を実行するフィードバック補償部43と、センサによる検出結果から求められる実際の走行速度と走行速度指令値との偏差に基づいて調整目標生成部100の制御パラメータを調整する応答性調整部200と、を備える。
(もっと読む)
車両
【課題】接地状態と、倒立状態との間の遷移時に、揺動制限手段による制動を解除することにより、簡素なシステムでありながら、乗降時に搭乗部を水平な状態に保持することができ、快適な乗降が可能で、小型、軽量、かつ、安価なようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪と、車体に揺動可能に取り付けられた搭乗部と、該搭乗部の揺動を可能又は不能にする揺動制限手段とを有し、接地状態、及び、倒立状態においては揺動制限手段によって搭乗部の揺動を不能にし、接地状態及び倒立状態の間の遷移状態においては揺動制限手段によって搭乗部の揺動を可能にする。
(もっと読む)
車両
【課題】一方の駆動輪への駆動トルクの付与が不可能であるときに、車両重心位置移動手段によって車両の重心位置を他方の駆動輪の方向へ移動させることにより、例えば、駆動モータが故障したときのように、片方の駆動輪への駆動トルクの付与が不可能になったときでも、旋回走行状態を制御でき、安全な場所まで容易に走行させることができる安全で便利な車両を提供できるようにする。
【解決手段】回転可能に車体に取り付けられた左右の駆動輪12と、車両重心位置を左右に移動させる車両重心位置移動手段と、前記駆動輪12の各々に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、一方の駆動輪12への駆動トルクの付与が不可能である場合、前記車両重心位置移動手段を制御して車両重心位置を他方の駆動輪12の方へ移動させる。
(もっと読む)
倒立車輪型移動体
【課題】障害物の検知に優れ、かつ装置の小型化を図ることができる倒立車輪型移動体を提供すること。
【解決手段】本発明にかかる倒立車輪型移動体10は、搭乗席2に搭乗者が座った状態で搭乗する移動体であり、例えば、倒立二輪型電動車椅子である。移動体10は、障害物検出センサである薄型レーザセンサ6を備えている。薄型レーザセンサ6は、フットレスト4や転倒防止バー5、さらには駆動輪3のホイールに設置することができる。
(もっと読む)
車両
【課題】回路構成が複雑でなく、位相差信号に対する応答性が良好で、かつ、熱により信号変動が小さいモーター制御回路を提供する。
【解決手段】モーターの回転制御回路において、前記モーターのPWM制御回路と、前記モーターの回転速度センサと、基準信号発生回路10と、位相比較回路と、前記モーターの検出回転速度信号を分周する分周器とを備え、この分周器からの信号と前記基準信号に基づく信号との位相差を位相比較器で求め、この位相差信号を前記PWM制御回路に供給するように構成した。
(もっと読む)
車両
【課題】車体傾斜状態の計測値と推定値とを比較することによって、車体傾斜状態の計測値の異常を確実に検出することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の鉛直軸に対する傾斜角を計測する傾斜計測手段と、前記駆動輪12の回転状態及び前記駆動トルクによって前記傾斜角を推定する傾斜推定手段と、前記傾斜計測手段によって計測された傾斜角と前記傾斜推定手段によって推定された傾斜角との差の絶対値が所定値より大きい場合に前記傾斜計測手段によって計測された傾斜角が異常であると判定する判定手段と、を備える。
(もっと読む)
車両
【課題】駆動輪回転状態の計測値と推定値とを比較することによって、駆動輪回転状態の計測値の異常を確実に検出することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記駆動輪の回転角速度を計測する回転計測手段と、鉛直軸に対する前記車体の傾斜状態及び前記駆動トルクによって前記駆動輪12の回転角速度を推定する回転推定手段と、前記回転計測手段によって計測された回転角速度と前記回転推定手段によって推定された回転角速度との差の絶対値が所定値より大きい場合に前記回転計測手段によって計測された回転角速度が異常であると判定する判定手段と、を備える。
(もっと読む)
1 - 20 / 106
[ Back to top ]