
Fターム[5H115QI02]の内容
車両の電気的な推進・制動 (204,712) | 制動、停止 (3,697) | 制動の種類 (3,172) | 電気制動 (2,522)
Fターム[5H115QI02]の下位に属するFターム
Fターム[5H115QI02]に分類される特許
1 - 20 / 39
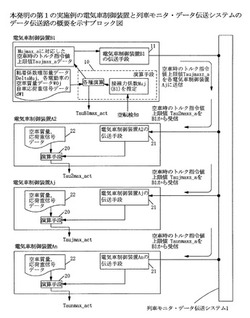
列車モニタ・データ伝送システムを有する列車制御装置
【課題】常に編成全体として粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる列車制御装置を提供すること。
【解決手段】先頭電動車の電気車制御装置B1で空転あるいは滑走を最初に検知すると、そのときの接線力係数Muj(B1)を推定し、この接線力係数と、先頭車から後方の車両における粘着係数の増大量データDeltaMujと、期待粘着係数Muz_expt等をもとに、各電気車制御装置B1,Ajにおける空車時のトルク指令値上限値Taujmaxz_aを求め、列車モニタ・データ伝送システム1を介して各電気車制御装置に対して伝送する。各電気車制御装置B1,Ajでは、上記トルク指令値上限値Taujmaxz_aから実際に発生すべきトルク指令値上限値Taujmax_actを求め、これを目標値として、各電気車制御装置の制御対象範囲の電動機でトルクを制御する。
(もっと読む)
車両用制動発生システム

【課題】本発明は、車両用制動発生システムに係り、電動モータ及び電動ブレーキへの電力供給を簡素な構成で実現させつつ、車両に要求される制動トルクを確実に発生させることにある。
【解決手段】車体バネ下に配置され、電力供給により車輪を駆動する駆動トルクを発生すると共に、車輪の回転により回生電力を発生する電動モータと、車体バネ下に配置され、電力供給により車輪を制動する制動トルクを発生する電動ブレーキと、車体バネ上に配置されるバッテリと電動モータとの間で授受される電力が流通する第1電力線と、電動モータから電動ブレーキへ供給される電力が流通する第2電力線と、車両の制動が要求される場合、要求制動トルクを、電動モータの回生に伴う回生制動トルクと、該電動モータの発生する回生電力の全部又は一部の第2電力線を介した供給により電動ブレーキの発生する電気制動トルクと、で発生させる制動トルク制御手段と、を備える。
(もっと読む)
列車モニタ・データ伝送システムを有する列車制御装置
【課題】常に編成全体として粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる列車制御装置を提供すること。
【解決手段】先頭電動車の電気車制御装置B1で空転あるいは滑走を最初に検知すると、そのときの接線力係数Muj(B1)を推定し、この接線力係数と、先頭車から後方の車両における粘着係数の増大量データDeltaMujと、計画トルク指令値Tauczjをもとに、各電気車制御装置B1,Ajにおける実際に発生すべきトルク指令値上限値Taujmax_actを求め、車両モニタ・データ伝送システム1を介して各電気車制御装置に対して伝送する。各電気車制御装置B1,Ajでは、上記トルク指令値上限値Taujmax_actを目標値として、各電気車制御装置の制御対象範囲の電動機でトルクを制御する。
(もっと読む)
電気車用定位置停止制御装置
【課題】車両の低速走行領域でも定位置停止精度を向上させることを達成する。
【解決手段】低速条件指令部10より、第3演算部8へ出力される低速走行パターンと、定電力ブレーキパターン出力部11より第3演算部8へ出力される定電力ブレーキパターンにより最大電気ブレーキ力BF2が低速条件・最大電気ブレーキ力BF21となる。低速条件・最大電気ブレーキ力BF21は、低速領域では、最大電気ブレーキ力BF2よりも低いブレーキ力を使用しているため、低速条件・最大電気ブレーキ力BF21で目標停止位置に停止することが困難な場合は、最大電気ブレーキ力BF21までブレーキ力を上げ、目標停止位置に停止することを可能とする。
(もっと読む)
インバータ誤動作停止システム
【課題】過去の鉄道事故において、インバータの論理部の誤動作が原因で、論理部が減速指令を受け取れない状態になり、その前に受けていた加速指令を保持し、列車としては減速しようとしているのに、当該インバータが加速を継続し、所望の減速度を得られず事故に至った例があり、インバータ論理部の信頼性向上が必要である。
【解決手段】インバータとは別にインバータ監視装置を設置し、インバータの誤動作を検知したときには、高速度遮断器などの装置を動作させ、主回路を切離すことでインバータの動作を強制的に停止したり、インバータの論理部にリセットをかける等の処理を行うことにより、インバータの誤動作による危険を防止する。
(もっと読む)
電気駆動車両
【課題】坂道において電気駆動車両の発進及び停止を行う時に機械式ブレーキと電動機の協調制御を行うことなく、後退することのない発進及び停止を実現する。
【解決手段】本発明の電気駆動車両は、車輪を制動あるいは駆動するための誘導モータと前記誘導モータを制御する電動機制御器と前記車輪を制動する機械式ブレーキを備え、前記車両が前記機械式ブレーキが作動していない状態で停止している時は前記電動機制御器が前記誘導モータの固定子に直流電圧または−1〜+1Hzの間にある周波数の交流電圧を印加し、前記車両を停止させるトルクを前記誘導モータに発生させて前記車両を停止状態で維持する。
(もっと読む)
車載用アクチュエータシステム
【課題】車載用アクチュエータシステムにおいて、電動機で発生した電力を車両電源系統が吸収できない場合や車両電源系統が電力を吸収できる場合でも電動機が外力によって高速に回されると電動機のトルク又は電流を小さくできなくなる場合に起る電動機がトルクを発生できなくなる事態、また、高速回転、停止、低速回転と運転状態が頻繁に切り替ることによる車両電源系統の電圧の急変、電磁波によるノイズの発生を防止、低減すること。
【解決手段】電動機に流れる三相電流の位相を進めるか遅らせるように制御するか、電動機に流れる三相電流の実効値に対する発生トルクの割合が小さくなるように制御するか、電動機に流れるd軸電流を流すことにより、電動機が常に電源系統から供給された電力を消費するか又は前記電源系統へ電力を供給しないように電動機を制御すること。
(もっと読む)
車両
【課題】倒立制御停止直後から所定時間、駆動トルクを付加して車体を特定方向に傾斜させることによって、緊急停止時を含む倒立制御停止時に、確実に車体を特定方向に傾斜させることができ、車体固定式のストッパを車体の片側のみに取り付けるだけでよく、車両を軽量・小型化することができ、使い勝手がよく、かつ、安全に使用することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に与える駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の姿勢制御の停止直後から所定時間、前記駆動輪12に駆動トルクを付加し、前記車体を特定方向に傾斜させる。
(もっと読む)
車両
【課題】倒立制御停止直後から所定時間、能動重量部に推力を付加して移動させ、その重心移動により車体を特定方向に傾斜させることによって、緊急停止時を含む倒立制御停止時に、確実に車体を特定方向に傾斜させることができ、車体固定式のストッパを車体の片側のみに取り付けるだけでよく、車両を軽量・小型化することができ、使い勝手がよく、かつ、安全に使用することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、前記車体に対して移動可能に取り付けられた能動重量部と、前記駆動輪12に与える駆動トルク及び前記能動重量部の位置を制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の姿勢制御の停止直後から所定時間、前記能動重量部に推力を付加して前記能動重量部を車体に対して移動させ、前記車体を特定方向に傾斜させる。
(もっと読む)
車両制御装置
【課題】簡素な構成によりないし既存の構成を活用して、モータ駆動される車輪に電気的な制動トルクを印加することができる、車両制御装置を提供する。
【解決手段】エンジン3によって駆動される回転子5aを備えると共に界磁電流24が自在に通電され、エンジン回転数に応じた周波数の交流電圧25を出力自在な発電機5と、誘導電動機4に交流電圧25による回転磁界が発生自在となるよう、発電機5と誘導電動機4を電気的に接続する結線6と、エンジン3の回転数、発電機5の回転子5aの回転数ないし交流電圧25の周波数に対応する第1の信号21と、第2の車輪の回転数ないし誘導電動機4の回転子4aの回転数に対応する第2の信号22と、が入力され、発電機5の回転子5aの回転数が、誘導電動機4の回転子4aの回転数よりも低いと判定した場合、発電機5に界磁電流24を通電させる。
(もっと読む)
電動車両
【課題】使い勝手を損なうことなく、クラッチオフ時における電動車両1の増速を抑制する。
【解決手段】電動車両1は、駆動モータ32と、駆動モータ32からの駆動力を駆動輪22に伝達する駆動軸24と、駆動モータ32及び駆動軸24間の駆動連結を断接するクラッチ35と、少なくとも駆動モータ32及び駆動軸24間の駆動連結が切断されているときに駆動軸24の回転によって駆動される発電機41と、発電機41からの電力供給を受けて、駆動モータ32及び駆動軸24間の駆動連結が切断されているときに駆動軸24に対し制動力を付与する、磁気粘性流体を利用した電磁ブレーキ5と、を備えている。
(もっと読む)
車両制御装置
【課題】編成車両間での衝動を緩和する車両制御装置を提供する。
【解決手段】複数の車両で構成され、少なくとも1両が動力車である列車による勾配の変極点の通過を検出する位置検出手段と、前記列車が前記変極点を走行する場合、前記列車のうち前記変極点を基準として通過した車両群と未通過の車両群を車両単位で区別する制御手段と、前記動力車に設けられ、前記動力車自体に対して減速制御する減速手段と、前記動力車に設けられ、前記動力車自体に対して加速制御する加速手段とを備える。
(もっと読む)
車両制御装置
【課題】電気ブレーキから空気ブレーキへの切替によってブレーキ力が急変するような場合であっても、空気ブレーキへの切替後にブレーキの効き具合を迅速に検知することができ、その結果として停止位置の精度を向上させることができる定位置停止制御装置1を提供する。
【解決手段】定位置停止制御装置1は、電気ブレーキから空気ブレーキへの切替速度域において、ブレーキ指令決定手段25によるブレーキ指令を保持する。これにより、定位置停止制御装置1は、空気ブレーキの立ち上がり完了時に、前記ブレーキ指令に対して整定状態となる制御するとともに、空気ブレーキの立ち上がり完了後に短時間で空気ブレーキの効き具合を検知できるように制御する。
(もっと読む)
動力装置
【課題】小型化および製造コストの削減を実現できるとともに、設計の自由度を高めることができる動力装置を提供する。
【解決手段】動力装置1は、エンジン3と、第1および第2回転機10,20を備え、これらの動力によって前輪4を駆動する。第1回転機10は、第1および第2ロータ14,15とステータ16を備え、ステータ16に発生する電機子磁極の数と、第1ロータ14の磁極の数と、第2ロータ15の軟磁性体コア15aの数との比が、1:m:(1+m)/2(ただしm≠1)となるように設定されている。
(もっと読む)
車両の停止保持装置及び停止保持方法
【課題】車両の停止制御中に掛かるモータへの熱負荷を低減する。
【解決手段】車輪に駆動トルクを伝達可能なモータ3,7を複数備える。そして、所定の停止保持条件を満足すると、車両の停止状態を保持するための停止保持トルクTstopをモータ3又は7で発生する。その停止保持トルクTstopを発生するモータ3又は7を、時間経過と共に切り替える。
(もっと読む)
駆動力配分装置および車両制御装置
【課題】2つの駆動源と相互に接続した2つの差動装置とを用い、各駆動源の駆動力を個別に回転駆動することで一対の被駆動対象物間で駆動力を移動できるようにする。
【解決手段】電磁クラッチCLにより第1ギヤ列18aを作動状態とし、回転方向が逆向きとなるよう各電動モータM1,M2を個別に回転駆動することで、左右の後輪間で駆動トルクを移動させ、各電動モータM1,M2の最大駆動力以上の駆動トルクを発生させる。電磁クラッチCLにより第2ギヤ列18bを作動状態とし、回転方向が同一の向きとなるよう各電動モータM1,M2を個別に回転駆動することで、左右の後輪間で駆動トルクを移動させ、各電動モータM1,M2による最大駆動力以上の駆動トルクを発生させる。
(もっと読む)
電気駆動車両
【課題】車輪半径の変化に影響されることなく、駆動輪のスリップを精度良く検出する電気駆動車両の提供。
【解決手段】車輪を駆動あるいは制動するための電動機1,4と、電動機を制御する電動機制御器33を備えた電気駆動車両において、車両の従動輪及び駆動輪の回転速度を検出する速度検出器9,10,11,12を備え、従動輪及び駆動輪の回転速度検出値から駆動輪のスリップ率を演算して駆動輪がスリップしているか否かを判定するスリップ判定器18を備え、スリップ判定器18は予め設定した従動輪及び前記駆動輪の車輪半径を用いて従動輪及び駆動輪の車輪速度を検出する手段を備え、車輪速度を検出する手段は駆動輪がスリップしていない状態で従動輪の車輪速度検出値と駆動輪の車輪速度検出値が近づくように、従動輪の車輪速度検出値あるいは駆動輪の車輪速度検出値を演算するゲインを調整する。
(もっと読む)
車両の制駆動制御装置及び制駆動制御方法
【課題】車両状態が変化した場合にも、要求される車両挙動を実現するためのヨーモーメントを発生させることを可能とする。
【解決手段】左右の車輪3a、3bの制駆動力を独立に制御可能な制駆動手段4と、車両目標制駆動力及び車両目標ヨーモーメントを設定する車両目標値設定手段7と、目標制駆動力及び目標ヨーモーメントに基づいて左右の車輪3a、3bに制駆動力を配分する制駆動力配分手段7と、走行状態に基づいて実現可能な制駆動力及びヨーモーメントを算出する実現可能値設定手段7と、運転者による操舵変化量を検出する操舵変化量検出手段9と、運転者に旋回を要求する旋回要求手段14と、実現可能な制駆動力又はヨーモーメントが車両目標制駆動力又は車両目標ヨーモーメントより小さく、かつ旋回要求手段14から旋回を要求された場合に、操舵変化量に応じて車両目標制駆動力及び車両目標ヨーモーメントを補正する目標値補正手段7と、を備える。
(もっと読む)
制御装置を有する車両
【課題】電気式ブレーキのみで、車両を目標地点で所定の制限速度あるいは停止状態にすることができ、車両の運動エネルギーの有効利用及び省エネルギー化を効果的に図ることができる車両を提供する。
【解決手段】高速度領域において車両速度が高いほど最大ブレーキ力が小さくなる電気式ブレーキ手段と、機械式ブレーキ手段と、目標地点を所定の制限速度で通過あるいは停止するために必要なブレーキ力を出力する運転制御装置とを具備する車両において、前記運転制御装置は、前記電気式ブレーキ手段の最大ブレーキ力以下のブレーキ力を前記必要なブレーキ力として出力する。
(もっと読む)
電気車制御装置
【課題】 滑走防止弁を設けることも、VVVFインバータ装置からブレーキ制御装置へ速度センサ信号の配線を増加することも行わずに、車輪滑走を防止することが可能な電気車制御装置を提供することである。
【解決手段】 可変電圧可変周波数制御方式のVVVFインバータ装置1によって車両駆動用交流電動機3a〜3dを駆動し、車両駆動用交流電動機3a〜3dで駆動される駆動車輪2a〜2dのブレーキ力をブレーキ制御装置5で制御する。VVVFインバータ装置1は、車両駆動用交流電動機3a〜3dの速度をもとに駆動車輪2a〜2dが滑走したことを検知する。ブレーキ制御装置5は、VVVFインバータ装置1から滑走検知信号を受け取り空気ブレーキ力の指令値を弱めて駆動車輪2a〜2dのブレーキ力を弱め滑走を抑える。
(もっと読む)
1 - 20 / 39
[ Back to top ]