
Fターム[5H115QN08]の内容
車両の電気的な推進・制動 (204,712) | 制御、演算 (10,339) | フィードバック制御するもの (3,031) | 電気的変量をフィードバックするもの (1,377)
Fターム[5H115QN08]の下位に属するFターム
電流フィードバックするもの (342)
Fターム[5H115QN08]に分類される特許
1 - 20 / 1,035
鞍乗型車両
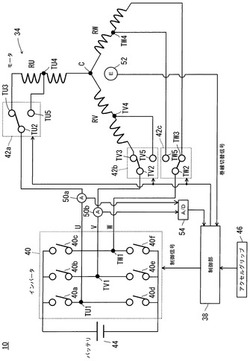
【課題】インバータの大型化を抑えつつインバータの故障を防止できかつモータの巻線を円滑に切り替えることができる、乗り心地の良い鞍乗型車両を提供する。
【解決手段】自動二輪車10は、切り替え可能な巻線を有するモータ18と、アクセルグリップ22と、アクセルグリップ22からの指示に基づいて制御信号を出力する制御部20と、制御部20からの制御信号に基づいてモータ18に出力電圧を供給するインバータ14と、巻線を切り替えるスイッチ16a〜16cと、モータ電流を検出する電流センサ24a,24bと、モータ18の位相を検出するエンコーダ26とを備える。制御部20は、巻線の切り替え条件が成立したとき、アクセルグリップ22からの指示に係わらずモータ電流が0になるように、モータ電流とモータ18の位相とに基づいてインバータ14のデューティー比を調整する。デューティー比調整期間中に巻線を切り替える。
(もっと読む)
ハイブリッド車両の制御装置

【課題】コンデンサにおける回生電力の蓄電機能を向上させる。
【解決手段】ハイブリッド車両の制御装置(100)は、内燃機関(200)、第1電動機(MG1)及び第2電動機(MG2)と、電源手段(12)と、第1及び第2電動機の各々に対応するインバータ(710,720)及びコンデンサ(c1,c2)とを備えたハイブリッド車両を制御するものであり、回生を行うべき状態であるか否かを判定する回生判定手段(110)と、電源手段の蓄電量又は温度が所定の閾値以上であるか否かを判定する電源状態判定手段(120)と、一方の電動機で回生を行うと共に、他方の電動機の回転数をゼロに近づけるように制御する電動機制御手段(130)と、電源手段から他方の電動機に対応するインバータへの電力供給を遮断し、回生電力を他方の電動機に対応するコンデンサに蓄電させる蓄電制御手段(140)とを備える。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両の駆動トルクの変動を抑制するように、電動機および発電機のトルクを制御する。
【解決手段】HVECU70は、SMR55をオフするバッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、MG1およびMG2が電力制御トルクを出力したときと、出力しないときとの間での駆動軸32aに出力可能なトルク範囲の差分を算出し、さらに、当該差分の時間軸に対する変化量を制約した値を反映して駆動トルクの上下限範囲を定める。MG1およびMG2のトルク指令値は、当該上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように設定される。
(もっと読む)
車両および車両用制御方法
【課題】複数の蓄電装置の各々を保護しつつ、複数の蓄電装置の各々の充放電性能を十分に発揮する。
【解決手段】ECUは、第1バッテリの使用電力WB_aが放電側制限値Wout_a以上であって(S100にてYES)、かつ、指令パワーPcと第1バッテリおよび第2バッテリにおいて許容される入出力電力の上限値Woutfとが乖離している場合(S102にてYES)、Winf側補正量をクリアするステップ(S104)と、Woutf上乗せ処理を実行するステップ(S106)と、第1バッテリの電力WB_aがWout_aよりも小さい場合(S100にてNO)、あるいは、指令パワーPcと上限値Woutfとが乖離していない場合(S102にてNO)、通常Woutf決定処理を実行するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
ハイブリッド自動車
【課題】電動機に接続されたギヤ機構での異音の発生の抑制と車室内の騒音や振動の抑制との両立を図る。
【解決手段】騒音振動抑制制約運転ポイントでエンジンが運転されると共に要求トルクTr*に基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する通常制御を実行するとギヤ機構を介して駆動軸に接続されたモータから出力されるトルクの絶対値が閾値Tref以下となるときには(S170)、そのモータから出力されるトルクが閾値Trefより大きなトルクTsetとなり、エンジンが騒音振動抑制制約運転ポイントより高回転低トルク側で要求パワーPe*を出力する運転ポイントで運転され、要求トルクTr*に基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する(S180〜S230)。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】目標充電電力と実充電電力との差に応じて内燃機関の目標運転ポイントを変更するときの振動や騒音の発生を抑制する。
【解決手段】バッテリ50の実充放電電力Pbが充放電要求パワーPb*よりも充電電力として大きく、充放電要求パワーPb*と実充放電電力Pbとの差がなくなるように両者の差(Pb*−Pb)に応じてエンジン22の目標回転数Ne*と目標トルクTe*とからなる目標運転ポイントを変更するときには、エンジン22を効率よく動作させる運転ポイントを規定するように予め定められた動作ラインに沿って目標運転ポイントを変更する場合に比べてエンジン22の回転数の変化が抑制されると共にエンジン22の出力トルクが低下するように目標運転ポイントが変更される(ステップS110−S150)。
(もっと読む)
電気自動車
【課題】アクセルオフに伴って車両に制動力を付与するときに、バッテリが所定蓄電割合を超えて充電される状態が継続するのを抑制する。
【解決手段】アクセルオフに伴って車両に制動力を付与するとき、蓄電割合SOCが所定割合SOCref以上となると共に蓄電割合SOCの時間変化率kが値0を超えているときには(S100)、要求トルクTr*からモータ駆動トルクTmref(正の値)を減じたものをブレーキトルクTb*に設定して、設定したブレーキトルクTb*(制動力)が電気自動車に付与されるように油圧ブレーキ装置を制御し(S110)、その後、トルク指令Tm*にモータ駆動トルクTmrefを設定すると共に設定したトルク指令Tm*でモータが駆動するようインバータやバッテリの電圧を昇圧する昇圧コンバータを制御する(S120)。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、電気モータを作動させる電力を十分に確保することで車両の走行安定性の向上を可能とする。
【解決手段】エンジン11とモータジェネレータ14との駆動力を駆動輪16に伝達可能なハイブリッド車両にて、ハイブリッドECU100は、エンジン11の駆動力により車両を走行可能なエンジン走行モードとモータジェネレータ14の駆動力により車両を走行可能なEV走行モードとを切替可能であり、所定の条件が成立したらエンジン11への燃料供給を停止する減速フューエルカットを実行可能とする一方、エンジン走行モードで走行するときに所定の条件が成立してもバッテリ27の充電状態量が所定値より低かったら燃料供給を停止せずにモータジェネレータ14による発電を行う。
(もっと読む)
電動車両の制御装置
【課題】発電装置を最適燃費点で稼働させて、発電による燃費の低下を抑制できる電動車両の発電制御装置の提供を図る。
【解決手段】車両コントローラ4は、駆動用モータ1の制御装置7、電池2の制御装置9、エンジン12の制御装置14、発電機13の制御装置15等、システム全体の制御を行う。この車両コントローラ4は、車両の走行中に発電を行うか車両の起動スイッチをオフにした駐車中に発電を行うかを判断して発電装置3を作動制御する発電制御機能を備え、この判断により駐車中に発電装置3を作動させることで、駐車後の走行に必要な電力を供給可能としている。
(もっと読む)
産業車両
【課題】バッテリのバッテリ液面低下時の放電によるバッテリ劣化を抑制し、オペレータに対してバッテリ液面低下状態を確実に認識させることができる産業車両の提供にある。
【解決手段】車体11に搭載されるバッテリ14と、バッテリ14の電力により駆動力を生じる電動モータを備えた産業車両であって、バッテリ14のバッテリ液面が予め設定した設定バッテリ液面以下に達した液面低下状態を検出する液面レベルセンサ47と、液面レベルセンサ47による液面低下状態の検出に基づき、液面低下状態での車両稼動時間である液面低下状態稼働時間を積算する稼働時間積算手段と、液面低下状態稼働時間を記憶する記憶手段と、液面低下状態稼働時間の積算に応じて電動モータの駆動を段階的に制限する電動モータ制限条件に基づき、電動モータの駆動を制御するモータ制御手段と、を備えた。
(もっと読む)
ハイブリッド車両のモード切り替え時モータ回転数制御装置
【課題】油温や電源温度にかかわらず、モード切り替え時のモータトルク制御変化と第2クラッチトルク容量制御変化とを調時させて、空吹けやエンジンストールを防止する。
【解決手段】油温が設定温度未満の低油温時や、バッテリ温度が設定温度未満の電源低温時は、電気(EV)走行モードまたはハイブリッドHV走行モードの間に、EVモードおよびHEVモード間のWSCモードで行うモータ回転数制御で用いる目標モータ回転数として、低油温時用目標モータ回転数または電源低温時用目標モータ回転数をWSCモータ回転数制御マップにセットして学習する(S16,S18)。WSCモードである間に、S16またはS18で学習した低油温時用目標モータ回転数または電源低温時用目標モータ回転数に基づき、モータの回転数制御を行う。
(もっと読む)
電動車両の制御装置
【課題】バッテリの電力制限値を設定するに際し、バッテリ状態にかかわらずバッテリ保護機能と運転性向上の両立を図る。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータと、電力制限値制御手段と、を備える。モータジェネレータは、駆動源に設けられ、バッテリからの電力により駆動する。電力制限値制御手段は、バッテリの電力入出力の制限値である電力制限値を、短時間で終わる走行シーンで用いる瞬時用電力制限値と、長時間続く可能性のある走行シーンで用いる連続用電力制限値と、に分け、かつ、瞬時用電力制限値による制限幅を連続用電力制限値による制限幅よりも拡大するように設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】走行モードの切り替えを適切に実施し、運転性を向上させる。
【解決手段】動力源としてのエンジン及びモータジェネレータと、電力源としてのバッテリと、を備えるハイブリッド車両の制御装置であって、アクセル操作量に基づいてアクセル操作速度を算出するアクセル操作速度算出手段(S7)と、アクセル操作量に遅れ処理を施した補正アクセル操作量を算出する補正アクセル操作量算出手段(S7)と、少なくとも蓄電量及び補正アクセル操作量に基づいて、EVモード、又は、HEVモードへの移行を要求する走行モード移行要求手段(S10)と、EVモードへの移行要求があったときに、アクセル操作速度がアクセルペダル踏み込み中と判定できる正のEVモード移行禁止速度よりも大きいときは、EVモードへの移行を禁止するEVモード移行禁止手段(S11)と、を備えることを特徴とする。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】定速走行制御時における頻繁なエンジンの始動・停止が行われるのを防ぐこと。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両において、走行速度をステアリングスイッチで設定された目標速度を維持するように自動調整する定速走行制御を行っているとき、エンジン1の始動後モータジェネレータ2の駆動源であるバッテリが設定したクルーズ時SOC停止判定値に充電されるまでの間、エンジン1の停止を禁止する制御を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジン始動前に電気走行モードからハイブリッド走行モードへのモード切り替え要求がキャンセルされた際の排気および運転性の悪化を抑制できるハイブリッド車両の制御装置を提供する。
【解決手段】 統合コントローラ20は、EVモードからHEV走行モードへのモード切り替え要求に伴うエンジン始動要求がなされた後、エンジン始動前に当該モード切り替え要求がキャンセルされた場合、既にエンジン回転数Neが上昇を開始しているとき、すなわちエンジン1がクランキング中であるときには、エンジン始動後にエンジン1を停止させる。
(もっと読む)
回転機の制御装置
【課題】永久磁石を備えるモータジェネレータ10の減磁の有無を判断するための処理手段を適合するに際し、その工数が多くなること。
【解決手段】モータジェネレータ10は、クラッチC1を介して駆動輪14に機械的に連結されて且つクラッチC2を介してエンジン16に機械的に連結されている。車両の起動スイッチがオンされた直後、クラッチC1,C2を解除した状態において、電流フィードバック制御によってモータジェネレータ10のトルクを制御し、この際の実際のトルクが要求トルクを下回ることに基づき、永久磁石の磁束が減少したと判断する。
(もっと読む)
ハイブリッド車両の始動制御装置
【課題】極低温時等のバッテリの内部抵抗が大きい状態でも、バッテリの消費電力量を少なくして、エンジンの始動ができるハイブリッド車両の始動制御装置を提供すること。
【解決手段】統合コントローラ20は、バッテリ温度センサ18で検出される温度が設定値よりも低い状態で前記エンジン1を始動制御する際に、エンジン回転センサ10がエンジン1の稼働を検出するまではモータジェネレータ2を低回転数で作動制御し、エンジン回転センサ10が前記エンジン1の稼働を検出した後はモータジェネレータ2を高回転数で作動制御するようになっている。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両の燃費の向上を図る。
【解決手段】ハイブリッド車両の制御装置は、ハイブリッド車両がEV走行モードで走行している場合において、要求駆動力が所定の閾値になったときに、内燃機関をクランキングするように第1回転電機を制御する始動手段と、内燃機関の停止中にクランク位置を検出するクランク位置検出手段と、内燃機関がクランキングされる前に、検出されたクランク位置に基づいて、クランク位置が目標クランク位置となるように第1回転電機を制御するクランク位置制御手段とを備える。更に、検出されたクランク位置に基づいて内燃機関の始動に要する始動時間を推定し、該推定した始動時間に応じて、内燃機関の始動完了時にバッテリから第1及び第2回転電機に供給される電力がバッテリの出力制限に近づくように、所定の閾値を変更する閾値変更手段を備える。
(もっと読む)
ハイブリッド車両の制御装置及び制御方法
【課題】蓄電器が要求された出力を出せないために発電出力の増加が求められる場合であっても、要求出力に対する内燃機関の追従性を担保できるハイブリッド車両の制御装置を提供する。
【解決手段】内燃機関及び当該内燃機関の運転により発電する発電機を有する発電部と、車両の駆動源である電動機に電力供給する蓄電部と、蓄電部及び発電機の少なくとも一方からの電力供給により駆動する駆動部とを備えた車両の制御装置は、AP開度及び電動部の状態に応じて、駆動部に要求された出力を導出した後、駆動部に要求された出力に対応する出力を発電部が出力できず、かつ、駆動部に要求された出力と発電部の出力の差分である蓄電部必要出力を蓄電部が出力できないと判断したとき、駆動部に要求された出力と蓄電部が可能な出力の差分である補正発電部出力、及び蓄電部必要出力と蓄電器が可能な出力の差分である蓄電部出力制限量に応じた、内燃機関の燃焼制御に係るパラメータを導出する。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、電気モータ走行モードでの発進可能な領域を拡大して車両の良好な発進動作を可能とすると共に運転者に対する適正な発進支援を可能とする。
【解決手段】エンジン11とモータジェネレータ14との駆動力を駆動輪16に伝達可能なハイブリッド車両にて、ハイブリッドECU100は、エンジン11の駆動力により車両を走行可能なエンジン走行モードとモータジェネレータ14の駆動力により車両を走行可能なEV走行モードとを切替可能であり、車両を発進させるための必要駆動力がモータジェネレータ14の制御限界駆動力より大きいときには、エンジン走行モードへの操作を運転者に指示するが、運転者によりEV走行モードが選択操作されたときには、制御限界駆動力を特性限界駆動力に変更する。
(もっと読む)
1 - 20 / 1,035
[ Back to top ]