
Fターム[5H115RB21]の内容
車両の電気的な推進・制動 (204,712) | 走行用電動機の制御 (3,810) | 交流電動機の制御 (1,401)
Fターム[5H115RB21]の下位に属するFターム
Fターム[5H115RB21]に分類される特許
1 - 20 / 345
車両用モータ駆動装置および自動車
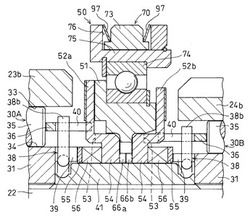
【課題】現変速段の2ウェイローラクラッチと次変速段の2ウェイローラクラッチとが二重係合するのを確実に防止することが可能な車両用モータ駆動装置を提供する。
【解決手段】1速摩擦板52aに1速側の係合凸部66aを設け、シフトリング51に係合凹部を設け、この1速側の係合凸部66aと係合凹部は、シフトリング51が1速シフト位置にある状態では互いに係合して1速摩擦板52aに対するシフトリング51の相対回転を規制するように形成し、シフトリング51の内周に突片を設け、出力軸22の外周に切欠きを有する環状突出部を設け、この突片と環状突出部は、突片が環状突出部の切欠きを軸方向に抜け出しかつ突片の位置と環状突出部の切欠きの位置が周方向にずれた状態では、突片が環状突出部に干渉することで、1速シフト位置と2速シフト位置の間でのシフトリング51の軸方向移動を規制するように形成する。
(もっと読む)
トルク制御装置及びトルク制御方法

【課題】適切なトルク低減により、好適な変速を達成する。
【解決手段】エンジン(1)と、モータ/ジェネレータ(5)と、前記エンジンのトルクと前記モータ/ジェネレータのトルクが入力する変速機(3)とを有する車両のアップシフト時のイナーシャフェーズにおいて、前記両方のトルクを制御可能なトルク制御装置であって、前記変速機の入力軸の目標角加速度を設定する角加速度設定手段(20;S3)と、前記エンジンのトルクの低減だけで前記目標角加速度が達成できる場合、前記エンジンのトルクを低減させる第一のトルク低減手段(20;S6)と、前記エンジンのトルクの低減だけで前記目標角加速度が達成できない場合、前記エンジンのトルクとモータ/ジェネレータのトルクを低減させる第二のトルク低減手段(20;S7)と、を備える。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、電気モータ走行モードでの発進可能な領域を拡大して車両の良好な発進動作を可能とすると共に運転者に対する適正な発進支援を可能とする。
【解決手段】エンジン11とモータジェネレータ14との駆動力を駆動輪16に伝達可能なハイブリッド車両にて、ハイブリッドECU100は、エンジン11の駆動力により車両を走行可能なエンジン走行モードとモータジェネレータ14の駆動力により車両を走行可能なEV走行モードとを切替可能であり、車両を発進させるための必要駆動力がモータジェネレータ14の制御限界駆動力より大きいときには、エンジン走行モードへの操作を運転者に指示するが、運転者によりEV走行モードが選択操作されたときには、制御限界駆動力を特性限界駆動力に変更する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】回転磁界制御と固定磁界制御とを適切なタイミングにより切り替え、ショック等を発生させることなく回転電機をロック可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、車両に搭載され、内燃機関と、回転電機と、差動機構と、ロック手段と、制御手段と、を備える。ロック手段は、回転電機をロックする。制御手段は、ロック手段に回転電機をロックさせる場合であって当該回転電機を制御することで回転電機の回転数が略0になった時に、回転電機の制御を回転磁界制御から固定磁界制御に切り替える。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】外乱ロバスト性に優れた高精度な推定が可能な車体振動推定装置を提供する。
【解決手段】演算部31,32で求めた前輪速VwFおよび後輪速VwRをバンドパスフィルタ33,34に通し、車体振動を表す車体共振周波数近傍振動成分fVwF,fVwRを抽出する。演算部35,36で、fVwF, fVwRから車体振動を表す前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、車体振動に起因した前軸上方車体部の上下変位および後軸上方車体部の上下変位を求め、これらから車体の上下バウンス速度dZvおよびピッチ角速度dθpを算出する。推定器25bではdZv,dθpをオブザーバ入力とし、制駆動トルクrTdから車両モデル37を用いた状態推定を行うことにより、車体の上下バウンス量fZv、上下バウンス速度dfZv、ピッチ角fθp、ピッチ角速度dfθpを推定する。
(もっと読む)
自転車用回生制動制御装置
【課題】ブレーキ回生を行う制御装置において、回生制動と機械制動との間で違和感を生じにくくする。
【解決手段】回生制動制御部74は、自転車に装着可能なフロントブレーキシステムとリアブレーキシステムの変位に関連してモータ60を制御する。回生制動制御部74は、右ブレーキセンサと、左ブレーキセンサと、第1制御部75と、を備えている。右ブレーキセンサは、フロントブレーキシステムの移動位置を検出する。左ブレーキセンサは、リアブレーキシステムの移動位置を検出する。第1制御部75は、フロントブレーキシステムおよびリアブレーキシステムが変位すると、右移動位置と左移動位置とにより得られた加算位置に応じた第1回生制動力を発生するようにモータ60を制御する。
(もっと読む)
位相制御装置、バッテリ充電装置、及び位相制御方法
【課題】3相交流発電機のいずれの相にも磁石位置検出機器やサブコイルを設けることなく、交流発電機の三相の交流出力に同期した各相同期信号を生成して進角/遅角制御を行う。
【解決手段】基準信号生成回路7は、三交流発電機1のロータ4の回転により発生するロータ4aの回転周波数を示す基準交流電圧に基づいて、交流出力電圧の周期と同じ周期の基準三角波Ptrg1,2を生成し、基準三角波Ptrg1,2の半周期に含まれる交流発電機1の各相の交流出力電圧のゼロクロス点の数に基づいて、基準三角波Ptrg1,2と交流出力電圧との位相差の基準とする基準位相を定める基準信号を生成する。
(もっと読む)
車両用左右駆動力調整装置の制御装置
【課題】二次電池の充電率にかかわらず、常に姿勢制御を行うと共に、減速による違和感のない姿勢制御を行う車両用左右駆動力調整装置の制御装置を提供する。
【解決手段】姿勢制御を行うためのトルク差を演算し(ステップS1、S2)、二次電池の充電率の増減に応じて、電動AYCモータとブレーキ装置へのトルク差の配分率を変動させて(ステップS3〜S6)、配分されたトルク差により電動AYCモータ及びブレーキ装置を各々制御して、姿勢制御を行う(ステップS6〜14)。
(もっと読む)
左右独立駆動車両の駆動ユニット冷却装置
【課題】冷却負荷を平準化して冷却器の小容量化、小型化を図る。
【解決手段】前後左右の四つの車輪FL,FR,RL,RRのそれぞれを互いに独立して駆動することのできる駆動ユニットDU1,DU2を備えた左右独立駆動車両の駆動ユニット冷却装置において、前記駆動ユニットは、左前輪FLと右後輪RRとをそれぞれ独立して駆動することのできる第1駆動ユニットDU1と、右前輪FRと左後輪RLとをそれぞれ独立して駆動することのできる第2駆動ユニットDU2とから構成され、前記第1駆動ユニットDU1から熱を奪って第1駆動ユニットDU1を冷却する第1冷却器CS1と、前記第2駆動ユニットDU2から熱を奪って第2駆動ユニットDU2を冷却する第2冷却器CS2とを備えている。
(もっと読む)
電気車駆動システム
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更が不要で、車体の振動乗り心地を改善する手法が必要である。また、電動台車で容易に実現できる手法が望ましい。
【解決手段】車輪を有する台車の上に車体が搭載された電気車であり、台車に装荷された電動機が歯車を内蔵した駆動装置を介して車輪を駆動することにより走行する電気車両において、電動機のトルクにより車体の振動抑制制御を行う。また、台車振動を電動機の回転速度から演算した情報をもとに電動機のトルクにより台車振動を抑制し、間接的に車体の振動の抑制を行う。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】加速時の燃費を改善しつつ良好な加速性能を確保可能なハイブリッド電気自動車の制御装置を提供する。
【解決手段】運転者の要求トルクをエンジン(2)と電動機(6)とに配分する際に、ハイブリッド電気自動車(1)が所定の加速要求状態にないと判定したときには、電動機(6)に配分されるトルクを電動機(6)の連続定格出力トルクの範囲内に制限する一方、ハイブリッド電気自動車(1)が上記加速要求状態にあると判定したときには、上記制限を解除し電動機(6)に配分されるトルクを電動機(6)の短時間定格出力トルクの範囲内に制限する。
(もっと読む)
電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフト
【課題】高い振動減衰率を有すると共に、加速性能を維持した電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフトを提供する。
【解決手段】駆動タイヤ及び車軸を有する車体と前記駆動タイヤにトルクを付与する駆動モータMとを備える電動車両F1に用いられ、駆動モータMに対してモータ制御指令T*を供給する電動車両用制御装置1であって、前記車軸を中心とした前記電動車両F1の上下振動を示す振動パラメータによって駆動モータMをフィードバック制御することを特徴とする。
(もっと読む)
電動産業車両
【課題】簡便な演算方法により、回生時及び力行時の双方において駆動部を高効率に駆動可能な電源システム装置を備えた電動産業車両を提供する。
【解決手段】電動産業車両の電源システム装置3を、鉛バッテリ2と、大容量キャパシタ13と、大容量キャパシタ13の電圧制御を行うDCDCコンバータ12と、鉛バッテリ2及び大容量キャパシタ13の充放電電力を制御するコントローラ11とから構成する。コントローラ11は、電動産業車両の駆動源である電動モータ4,6の力行動作時に、鉛バッテリ2及び大容量キャパシタ13の内部抵抗と、電動モータ4,6の負荷要求電力に基づいて、電源システム装置3の損失が最小となるように、鉛バッテリ2及び大容量キャパシタ13の電流配分を決定する。
(もっと読む)
鉄道車両電動機駆動用インバータ装置
【課題】車両走行方向の均熱化を図りながら、取り扱いの容易で小型低コストを図った、鉄道車両永久磁石同期電動機駆動用インバータユニットを提供する。
【解決手段】冷媒を封入した冷却タンクを埋め込んだ受熱ブロックに半導体スイッチング素子および冷却フィンを備えたヒートパイプを取付けてなるインバータユニット4を鉄道車両車体1の床下に垂直方向に、かつ互いが水平となるように複数台設置し、前記各インバータユニット4毎に前記半導体スイッチング素子をゲート制御して直流電力を交流電力に変換して駆動するように構成した鉄道車両駆動用インバータ装置において、前記各インバータユニット4の受熱ブロックは、垂直方向の上下面の片面または両面に対し、前記出力交流電力の相数に対応する個数分の前記半導体スイッチング素子を車両走行方向に取付けるとともに、車両走行方向に平行な側面に前記冷却フィンを備えたヒートパイプを複数本取付けた。
(もっと読む)
デュアルモードのインバータを含む列車制御システム
【課題】列車の編成能力を列車及び各車両の基本構成を変更することなく、リアルタイムで容易に変更できるフレキシブルな列車制御システムを提供する。
【解決手段】各車両に取り付けられた台車18aにはインバータ17が設けられる。インバータ17は主電動機23駆動用インバータ又は補機13の補助電源用インバータとして動作する。総括制御部24は、列車の走行状況に応じて、各インバータ17が主電動機駆動用インバータとして動作するか、又は前記補助電源用インバータとして動作するか制御する。
(もっと読む)
電動車両の制御装置
【課題】制振効果を図りつつ、トルク振動の発生を抑止する。
【解決手段】制御ブロック7hは、減算器7gの出力値、すなわち、第2のトルク目標値の第1項Tm*2_1から第2のトルク目標値の第2項Tm*2_2を減算した値に対してフィルタ処理を施すことにより第2のトルク目標値Tm*2を出力する。ここで、制御ブロック7hにおける伝達特性Gz(s)は、車両同定モデル(Gp(s))の分子2次式を分子とするとともに、前記車両同定モデルの分子から演算される減衰係数(第1の減衰係数)ζzよりも大きく、かつ、1以下に設定された減衰係数(第2の減衰係数)ζc(ζz<ζx≦1)を有する2次式を分母としている。
(もっと読む)
ハイブリッド車両の振動制御装置
【課題】制振機能の向上を図ることが可能なハイブリッド車両の振動制御装置を提供する。
【解決手段】振動制御装置10は、エンジン20及びモータジェネレータ22間、並びに、モータジェネレータ22及び駆動輪26間を非締結又は部分締結状態としてモータジェネレータ22の回転速度をフィードバック制御により目標回転速度に制御し、且つ、エンジン20のトルク変動に応じたトルク変動をモータジェネレータトルクに加算して出力するものである。制振制御装置10のECU14は、モータジェネレータトルクに加算するトルク変動により生じるモータジェネレータ22の回転速度変動を算出し、算出した回転速度変動を目標回転速度に加算して補正目標回転速度を算出し、算出した補正目標回転速度になるようにフィードバック制御を実施する。
(もっと読む)
ハイブリッド車両の振動制御装置
【課題】制振機能の向上を図ることが可能なハイブリッド車両の振動制御装置を提供する。
【解決手段】振動制御装置10は、エンジン20と駆動輪27が接続される車両駆動軸26との間に設けられたモータジェネレータ22と、エンジン20とモータジェネレータ22との間の締結及び開放を行う第1クラッチ21と、モータジェネレータ22と車両駆動軸26との間の締結及び開放を行う第2クラッチ23とを備えている。また、振動制御装置10は、エンジン20の停止過程において第1クラッチ21を開放状態とすると共に、第2クラッチ23を部分的に締結状態とし、且つ、エンジン20の停止過程におけるトルク変動に負の所定係数を乗じたトルク変動から回転速度変動を算出し、所定回転速度に回転速度変動を加算して、モータジェネレータ22を運転させる。
(もっと読む)
電動車両及びその制御方法
【課題】歯打ちによるノイズや振動が発生することを抑制する。
【解決手段】車両コントローラ13が、要求トルクを出力する際にモータ3の出力トルクの符号が変化すると判定した場合、モータ3の出力トルクが変動トルク域内に入った際、変動トルク域内に入る前の変化速度より速い変化速度で出力トルクを変化させる。これにより、トルク変動によってモータ3の角速度変化と前輪2a,2bの角速度変化との間にズレが発生することを抑制できるので、歯打ちによるノイズや振動が発生することを抑制できる。
(もっと読む)
四輪駆動式産業用車両
【課題】前側及び後側の車輪に空転が発生した場合でも、走行し得る四輪駆動式産業用車両を提供する。
【解決手段】前部車軸及び後部車軸の途中にディファレンシャアル装置が配置されると共に、両ディファレンシャアル装置同士が連結軸により連結され、各車軸の先端部に車輪を駆動するモータがそれぞれ設けられたホイールローダであって、各モータ41を制御する制御装置44を、エンコーダ45により検出された回転速度に基づき前側及び後側における左右の車輪同士の回転速度比を演算する速度比演算部46と、この速度比演算部にて求められた回転速度比及び予め求められた内外輪の回転半径比に基づき前側及び後側における左右の車輪のいずれかが空転しているか否かを判断する空転判断部47と、この空転判断部にて空転していると判断された場合に、空転している車輪のモータ41のトルクを低下させるトルク指令を出力するトルク指示部48とから構成したもの。
(もっと読む)
1 - 20 / 345
[ Back to top ]