
Fターム[5H115SE01]の内容
車両の電気的な推進・制動 (204,712) | 主な制御対象 (12,865) | 電気機械 (3,767)
Fターム[5H115SE01]の下位に属するFターム
発電機 (258)
電動機 (1,820)
発電機、電動機兼用のもの (1,643)
Fターム[5H115SE01]に分類される特許
1 - 20 / 46
地震時における列車制動方法及びそのシステム
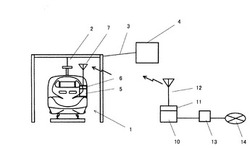
【課題】 従来のき電の停止を行わない列車制動の構成とすることで、地震が誤報であり警報キャンセル情報を受信した場合や安全が早期に確認された場合に、列車の制動を最適化することができる、地震時における列車制動方法及びそのシステムを提供する。
【解決手段】 地震時における列車制動方法において、地震計13が接続される地震検出側制御装置10を設置し、この地震検出側制御装置10の無線送信装置11から地震情報を列車1の車上搭載制御装置5の無線受信装置6へ送信し、前記地震情報に基づいて電力モード制御装置を作動させることにより、マスコンとインバータ制御装置を作動させて列車停止制御モードに切り換え、列車ブレーキ制御装置を稼働可能にする。
(もっと読む)
電気自動車

【課題】 車両の運転を急激に妨げることなく、インバータの過熱による特性変化および損傷を防止し、モータ駆動の制御特性の変化や、モータ駆動の不能を防止することができ、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、ECU21と、直流電力をモータ6の駆動に用いる交流電力に変換するインバータ31を含むパワー回路部28およびECU21の制御に従って少なくともパワー回路部28を制御するモータコントロール部29を有するインバータ装置22とを備えている。インバータ31に、このインバータ31の温度Tcを検出する温度センサSaを設け、温度センサSaで検出される温度Tcが閾値を超えたとき、温度Tcを時間tで微分したdTc/dtが0以下になるまでインバータ31に与える電流指令に制限を加えるインバータ制限手段95を設けた。
(もっと読む)
電気自動車の駆動制御装置
【課題】運転者の判断による操作を行うことなく、降雨による濡れ等の路面状況に応じた安定した走行が行える電気自動車の駆動制御装置を提供する。
【解決手段】アクセル開度に応じたモータ指令トルクTrを出力するトルク指令手段23と、インバータ装置22とを有する電気自動車の駆動制御装置に適用する。車両の走行中の路面の状況を検出する路面状況センサまたは降雨を検出するレインセンサ32を設ける。前記トルク指令手段23に、アクセル開度とモータ指令トルクTrとの関係を示すアクセル特性曲線a〜dを複数設定したアクセル特性曲線設定部28を設ける。また、路面状況センサ等の検出信号に応じて、アクセル特性曲線a〜dを切り換えるアクセル特性切換部29を設ける。
(もっと読む)
移動体制御システム
【課題】速度発電機やGPS、加速度センサ、ドップラーレーダーなどの位置推定手法は、列車状態や周辺環境などによって推定精度が常に変化するため、走行前に適切な誤差を想定して安全余裕距離として設定することが難しく、過剰な安全余裕距離が設定され、運行密度が低下する可能性がある。
【解決手段】車上装置1は、位置推定装置11と位置精度評価装置12と送信装置14と受信装置15と停止目標情報を元に列車の走行速度を制御する速度制御装置13とを有し、地上装置2は、各列車からの列車位置情報及び位置精度情報を受信する受信装置21と受信情報を元に各列車の在線確率を算出する在線確率算出装置22と在線確率情報を元に停止目標を算出する停止目標算出装置23と停止目標を送信する送信装置24とを有し、位置推定精度が走行中に変化した場合、その変化に追従して最適な停止目標を算出する。
(もっと読む)
フェールセーフ装置
【課題】パワートレインに所定以上のトルクが作用し、動力源とその動力源が出力するトルクによって駆動される駆動対象物との動力伝達が遮断された場合に、制限された範囲でトルクの伝達が可能なフェールセーフ装置を提供する。
【解決手段】動力源2とその動力源が出力するトルクによって駆動される駆動対象物Wとが連結軸9によって連結されたフェールセーフ装置において、連結軸9は、動力源2に許容されるトルク以上のトルクが掛かった場合に破断するように構成され、かつその連結軸9を軸線方向に押圧して、連結軸9が破断した場合の破断面同士13を接触させる弾性力を連結軸9に付与する弾性機構14が設けられている。
(もっと読む)
倒立振子型移動体
【課題】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら走行制御が行われる倒立振子型移動体において、搭乗者の意思に基づく操縦モードと、搭乗者の意思に基づかない自動運転モードとを実現することができる倒立振子型移動体を提供する。
【解決手段】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら車体の走行制御が行われる倒立振子型移動体において、制御装置から出力される操作信号に従って搭乗者の重心位置を調節するための重心位置調節手段を備え、制御装置は、搭乗者の意思に基づかないで所定の走行制御を行う自動運転モードへの切り換え指令が生成されたときに、目標となる走行状態が実現される重心位置となるように重心位置調節手段を制御し、重心位置に基づく走行指令に従って車輪駆動手段の制御を行う。
(もっと読む)
車両用ブレーキ装置
【課題】回生協調制動を行うと共に、回生制動の過剰使用に起因してABSが頻繁に作動してしまうことを抑制する。
【解決手段】前後輪の車輪速の最大値と前輪の車輪速の最小値との差および車体速度から相対スリップ率を求め、相対スリップ率が大きくなるほど減少する回生制動の係数を求めて、回生制動を行う。相対スリップ率の大きさが大きいほど回生制動の大きさを抑制する制御を行うことから、車両の前後方向や左右方向への荷重移動量を監視しなくても、回生制動が大きく効き過ぎることを防止でき、回生制動に起因する回生制動から油圧制動への不要な切換を防止でき、回生制動を有効に働かせることができる。
(もっと読む)
全方向移動型電動車両およびその制御方向
【課題】障害物回避動作を行う全方向移動型電動車両は、操作した方向と異なる方向に動作するため、操作者に対し強い違和感や不安感を抱かせるという問題がある。
【解決手段】車体部14と、操作者が操作した操作方向および操作量を検出する車体部14に設けた操作入力部13と、障害物までの距離および方向を検出する障害物センサ18と、操作入力部において検出される操作方向および操作量により操作力を算出する操作力推測部17と、障害物センサ18が検出した障害物までの距離に反比例し、かつ、障害物と反対方向に作用する仮想斥力を算出する仮想斥力算出部19と、操作力および仮想斥力の和より合力を算出する合力算出部20と、車体部14を操作力の方向から合力の方向へ回転させながら、合力の方向へ移動するよう制御する制御部21とを備えた構成である。
(もっと読む)
列車制御装置
【課題】デジタル信号用ハード・ウエアを追加設備することなく、デジタル的な情報伝送を行うことができ、複数個の地上子の組み合わせを必要とせず、しかも送受信情報量を増大し得る列車制御装置を提供すること。
【解決手段】地上装置4は、車上装置3との間で予め定められたデジタル信号に対応させた少なくとも一種類の周波数信号f1〜fnを送信する。車上装置3は、地上装置4から送信された周波数信号f1〜fnを受信し、デジタル信号として解読する。
(もっと読む)
列車制御装置及び列車制御方法
【課題】共振式軌道回路を使用して新たな周波数を使用しないで速度制御の多段化指示を行い、運転時分の最適化や曲線部の速度制御を実現する。
【解決手段】共振式の軌道回路2Tに送信器4bから先行列車の位置や進路開通等により変化する情報に加えて軌道回路2Tの区間の線路勾配や曲線半径等の線路構造に関する情報や臨時速度制限情報等の情報を有するデジアナ信号波を送信する。車上装置3は受信したデジアナ信号波に含まれる先行列車の位置や進路開通等により変化する情報に加えて軌道回路2Tの区間の線路勾配や曲線半径等の線路構造に関する情報や臨時速度制限情報等の情報に基づいて許容走行速度を決定する。
(もっと読む)
車体制振制御装置
【課題】車体振動抑制用エンジントルク補正量が制御分解能未満でも、変速により、車体振動抑制用エンジントルクを補正制御する。
【解決手段】サスペンション装置を介して車輪を懸架された車両のバネ上質量である車体の振動を、駆動力補正制御により抑制するための車体制振制御装置において、車体振動を抑制するための制振用駆動力補正量を演算して、駆動力補正制御に資する制振用駆動力補正量演算手段と、該手段で求めた制振用駆動力補正量が設定値未満であるとき、駆動力の伝達系における変速比をハイ側へ変更する変速比変更手段とを具備する。
(もっと読む)
電動式建設機械
【課題】急発進を抑制することができる電動式建設機械を提供する。
【解決手段】電動モータ26によって駆動する油圧ポンプ29と、油圧ポンプ29からの圧油により駆動する走行用油圧モータ13A,13Bを含む複数の油圧アクチュエータと、複数の油圧アクチュエータのうちのいずれかが操作されているか否かを検出する圧力スイッチ41と、走行用油圧モータ13A又は13Bが操作されているか否かを検出する圧力スイッチ43と、通常運転又はアイドル運転に切換える場合に電動モータ26が所定の定常回転数又は所定の低速回転数となるようにインバータ46を制御する車体制御部48とを備えた電動式油圧ショベルにおいて、車体制御部48は、アイドル運転中に走行用油圧モータ13A又は13Bが操作されて通常運転に切換える場合、インバータ46への指令回転数として、まず、所定の中間回転数を出力し、その後、所定の定常回転数を出力する。
(もっと読む)
併合支援システムおよび併合支援方法
【課題】併合作業の効率を向上させる。
【解決手段】被併合車Bに搭載され測距機能を有するミリ波無線伝送装置4bと、併合車Aに搭載され測距機能を有しミリ波無線伝送装置4bから出力される信号に基づいて車間距離情報10Dを出力するミリ波無線伝送装置4aと、少なくとも併合車Aに搭載され力行指令18Dまたはブレーキ指令17Dを各車両に送信する列車情報管理装置6aと、車間距離情報7Dと併合車Aの速度信号15Dに基づいて残走距離を演算し残走距離に基づいて併合車Aの目標速度を算出し目標速度に追従するように力行指令5Dまたはブレーキ指令6Dを制御し列車情報管理装置6aに出力する併合支援装置とを備える。
(もっと読む)
列車制御装置
【課題】自列車の位置を正確に検出できない路線においても、勾配のある区間で速度を目標速度バンド内に精度よく保って走行する。
【解決手段】本発明の一実施例に係る列車制御装置は、現在の列車速度をサンプリングして、加減速度を演算する加減速度演算部15と、前記加減速度及びノッチ特性に基づいて、走行路の勾配抵抗を求め、前記勾配抵抗及びノッチ特性を用いて所定時間後の列車速度を予測する速度予測部17と、所定時間後の列車速度が速度追従バンド内に収まるよう、ノッチ指令を決定するノッチ指令決定部18とを具備する。
(もっと読む)
自動走行台車
【課題】駆動装置に過負荷が加わることを避け得る自動走行台車を提供する。
【解決手段】制御装置2からの走行信号に基づいて第一車輪5aを回転させる第一トルクを制御する第一駆動装置1aと、第一駆動装置1aからの同調信号に基づいて第二車輪5bを回転させる第二トルクを制御する第二駆動装置1bを有する自動走行台車1であって、制御装置2は、第二駆動装置1bの異常時に受信する第二切離し信号に基づいて、第二駆動装置1bを制御して第二トルクをゼロとしかつ走行信号に含まれる速度設定値を変更して第一駆動装置1aを制御して第一トルクを調整する。制御装置2は、第一駆動装置1aの異常時に受信する第一切離し信号に基づいて、第一駆動装置1aを制御して第一トルクをゼロとしかつ速度設定値を変更しかつ第二駆動装置1bを同調信号に替えて前記設定値を含む走行信号に基づいて制御して第二トルクを調整する。
(もっと読む)
電動車両における電動モータの制御装置
【課題】電動モータトルクの嵩上げにより駆動力を増大させるトルクブーストをモータロックの判定時に禁止して、パワー素子の熱破壊を伴う急な温度上昇を防止する。
【解決手段】補償器401は、レスポンス向上補償トルクTm*1を求める。リミッタ402は、Tm*1が負値である場合Tm*1=0に制限して、リミット補償トルクTm*2を算出する。判定部403は、実測モータ回転数Nmと、パワー素子の温度Tjと、基本目標トルク指令値Tm*とに応じ、トルクブースト禁止判定処理を実施し、モータロック判定時にブースト許可係数Kbstを0にする。乗算器404は、Tm*2×Kbstによりトルクブースト禁止判定後トルクTm*3を算出し、加算器405は、Tm*+Tm*3により、レスポンス向上補償後・トルク指令値Tm*'を算出する。モータロック判定時は、Kbst=0により、Tm*'=Tm*となって、トルクブーストを禁止し得る。
(もっと読む)
目標速度算出機能を備えた列車制御装置
【課題】ダイヤ通りの走行を条件として列車の目標速度を適応的に算出する列車制御装置を提供する。
【解決手段】自列車と先行列車との間の閉塞区間数である開通区間数の変更履歴を取得する第1の取得手段と、前記先行列車が在線する閉塞区間の1つ前の閉塞区間の終点を起点にブレーキパターンを設定する設定手段と、前記変更履歴に基づいて、前記先行列車が在線する閉塞区間を抜けるまでの時間を算出し、前記ブレーキパターンと抵触しない範囲での最高速度を前記自列車の目標速度として算出する算出手段とを備える。
(もっと読む)
放電制御装置
【課題】待機電力を増加させることなく、メインスイッチがオフ状態となった場合に、迅速に、インバータのスイッチング素子を介して平滑コンデンサの残存電荷を放電させる。
【解決手段】主電源からの電力供給の有無に拘わらず、少なくとも残存電荷が放電する放電時間に亘り、放電制御装置10が動作可能な電力を供給するバックアップ電源1と、インバータを構成するスイッチング素子3に対し、スイッチング素子3を飽和領域で動作させるスイッチング制御信号S1を印加するドライバ回路12とは独立して備えられ、スイッチング素子3を活性領域で動作させる放電制御信号S2を生成して印加する放電制御部2とを備える。
(もっと読む)
運転支援装置
【課題】目標走行パターンを用いた運転支援において運転者の受ける違和感を抑制する運転支援装置を提供することを課題とする。
【解決手段】走行予定経路の先読み情報に基づいて走行予定経路における目標走行パターンを設定し、当該目標走行パターンに追従するように運転支援を行う運転支援装置1であって、運転者の運転操作の履歴に基づいて運転支援を行うことを特徴とし、運転者の運転操作の履歴に基づいて運転支援制御のON/OFFを切り替えたり、あるいは、運転者の運転操作の履歴に基づいて目標走行パターンを設定する。
(もっと読む)
電動車両
【課題】簡易な構成で充電を行うことが可能な電動車両を提供する。
【解決手段】蓄電装置13と、車輪20のホイール21内に設けられたモータ12と、蓄電装置とモータとを接続する導線34と、電流制御装置23と、を備えた電動車両10であって、モータは、ステータコア31と、ステータコアの内周側と外周側の間を架け渡すコイル32と、を有するステータ33と、ステータから発生する磁界によって回転可能に構成されたロータ35と、を有するとともに、ステータコアの軸方向を車両の幅方向に揃えて、ホイールにおける車両外側端面にコイルの架け渡し部分45が面するようにホイール内に配されており、電流制御装置は、車両の停止中において、外部機器50を車両外側端面に対向配置して発生させたステータの軸方向と揃った回転磁界により、コイルの架け渡し部分に発生した誘起電圧に伴ってコイルに流れる電流を、蓄電装置に送電する充電制御を行う。
(もっと読む)
1 - 20 / 46
[ Back to top ]