
Fターム[5H115SE05]の内容
車両の電気的な推進・制動 (204,712) | 主な制御対象 (12,865) | エンジン (1,876)
Fターム[5H115SE05]に分類される特許
1 - 20 / 1,876
エンジンの制御装置
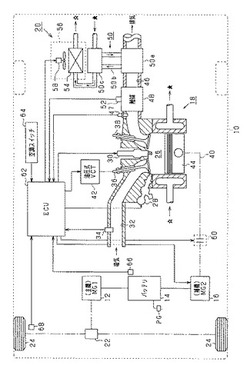
【課題】車載主機として回転機12のみを備えて且つ、この回転機12の電力供給源となるバッテリ14と、バッテリ14を充電する車載補機としての回転機16と、この回転機16の動力供給源となるエンジン18とを備えるレンジエクステンダ電動車両10において、車載機器の数を低減することのできるエンジン18の制御装置を提供する。
【解決手段】車両10には、燃焼室26に供給される吸気量を変更すべく、吸気バルブ36のバルブタイミングを「進角位置」又は「遅角位置」に切り替えるVCT装置42が備えられている。ここで、上記回転機16の発電電力が大きい大発電モード処理が行われる場合に「進角位置」に切り替え、上記発電電力が小さい小発電モード処理が行われる場合に「遅角位置」に切り替えるべく、VCT装置42を操作する。
(もっと読む)
鉄道車両用駆動システムおよび鉄道車両、これを備えた列車編成

【課題】電化区間,非電化区間それぞれにおいて最適な電源を用いる方法として、複数の異なる電力源(架線,エンジンにより駆動される発電機,燃料電池)に対応するシステムが提案されている。これによれは、電化区間,非電化区間それぞれにおいて、最適な駆動システムにて、列車を運行することが可能となる。しかしながら、非電化区間を走行することを前程としたシステムと比較して、エンジンの起動,停止の機会が増加することになる。この結果、エンジンを起動するためのスターターモータの信頼性が低下すると言う問題が生じる。
【解決手段】エンジンに接続された発電機を、駆動システムの有する電力変換回路によって電動機として動作させ、エンジンを起動することで、スターターモータの負荷を低減し、高信頼の駆動システムを実現する。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】要求制動トルクをモータジェネレータによる制動トルクおよび機械式ブレーキによる制動トルクの両方で分担する場合に、エンジンを始動する際の駆動力変動をモータジェネレータによって適切に抑制できるようにする。
【解決手段】エンジン12を始動する際に、予め駆動系制動トルクの分担量上限値が制限され、それに伴ってモータジェネレータMGによる制動トルクの分担が低減される一方、その制動トルクの低下を補完するように油圧ブレーキ62による制動トルクの分担が大きくされる。このため、制動トルク制御とエンジン12の始動制御とが重なった場合でも、要求制動トルクに応じた制動トルクを発生させつつモータジェネレータMGによる制動トルクに余裕を残すことができ、そのモータジェネレータMGによる制動トルクの制御でエンジン12の初爆トルクを適切に吸収して駆動力変動を抑制することができる。
(もっと読む)
ハイブリッド自動車
【課題】内燃機関の始動制御中に内燃機関の停止が要求されたときでも内燃機関をよりスムーズに停止させる。
【解決手段】エンジンの始動制御を実行している最中にその停止が要求されたときには(S110)、停止制御開始回転数に基づいてレートリミットTlimを設定すると共にエンジンの現在の回転数Neに基づいて停止時基本トルクTsbを設定し、前回のモータMG1のトルク指令(前回Tm1*)からレートリミットTlimを減じたトルクと停止時基本トルクTsbとのうち大きい方をモータMG1から出力すべきトルク指令Tm1*に設定してモータMG1を制御する(S170〜S230)。これにより、エンジンの回転数Neをスムーズに減少させ、ショックを伴うことなくエンジンを目標停止位置により正確に停止させることができる。
(もっと読む)
ハイブリッド自動車用冷却システム
【課題】インバータの信頼性低下を抑制し得るハイブリッド自動車用冷却システムを提供する。
【解決手段】サーモスタット24は、ラジエータ経路30と冷却水循環路10とを連通させない状態と、ラジエータ経路30と冷却水循環路10とを連通させる状態とを切り替える。ECU34は、ポンプ26の回転数を制御することにより、冷却水循環路10内を循環する冷却水の単位時間当りの流量を増減させることができる。ECU34は、サーモスタット24が、ラジエータ経路30と冷却水循環路10とを連通させない状態である場合における、冷却水循環路10内を循環する冷却水の単位時間当りの流量を、サーモスタット24が、ラジエータ経路30と冷却水循環路10とを連通させない状態である場合における冷却水の単位時間当たりの流量より多くするように制御する。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車について、後進−前進切り換え時において、車両のショックの発生の抑制、並びに車速の応答性の向上を達成すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。通常、モータのトルク(MGトルク)は、アクセル開度に基づいて決定されるMGトルク基準値と、クラッチ戻しストロークに基づいて決定されるMGトルク制限値とのうち小さい方(=MGトルク最終基準値)に調整される。シフト位置が「リバース」であり且つMGトルク最終基準値の減少勾配が所定値を超えたとき、MGトルクの減少勾配が前記所定値に制限される。シフト位置が「1速」であり且つクラッチが完全分断状態にあり且つアクセルペダルの操作が開始されたとき、MGトルクがMGトルク最終基準値より大きくされる。
(もっと読む)
ハイブリッド自動車
【課題】走行中の内燃機関の始動を走行状態に応じてより適したものとする。
【解決手段】走行中にエンジンを始動する際には、車速Vが高いほど大きくなる傾向にモータリングトルクの最大トルクTm1maxを設定し(S210)、設定した最大トルクTm1maxを用いてモータによってエンジンをモータリングする(S220〜S290)。これにより、高車速で走行している最中にエンジンを始動する際に、バッテリの性能をより発揮させてエンジンをより迅速にモータリングして始動することができると共に、エンジンの回転数が共振回転数帯で滞留する時間をより短くして共振による振動などをより抑制することができる。
(もっと読む)
ハイブリッド自動車
【課題】減速中に加速要求がなされたときに車両を迅速に加速させる。
【解決手段】減速からの加速と判定したときには、エンジンを始動して必要な回転数にするまでに要する時間に相当する時間などに設定された所定時間が経過するまでは、アクセル変化量ΔAccに係数αを乗じて得られる出力補正量ΔWを基本出力制限Wobaseに加えた値として出力制限Woutを設定する(S110〜S140)。これにより、基本出力制限Wobaseを出力制限Woutとした場合に比して、大きな出力制限Woutを用いてモータのトルク指令を設定して加速することができると共にエンジンを始動して必要な回転数まで上昇させてエンジンからのパワーを加えて加速することができる。この結果、減速中に加速要求がなされたときに車両を迅速に加速させることができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】内燃機関を駆動力源とする従来の車両と同様の変速感覚でマニュアルシフトを実行することができるハイブリッド車の制御装置を提供する。
【解決手段】駆動力源として内燃機関および電動機を有するハイブリッド車両であって、少なくとも前記内燃機関の出力トルクを複数の変速比で変速して駆動輪へ伝達させる変速手段と、前記変速を運転者のマニュアルシフト動作に基づいて実行するマニュアルシフト手段とを備えたハイブリッド車両の制御装置において、前記マニュアルシフト手段による前記変速を実行する場合に、前記電動機の出力特性を前記内燃機関の出力特性に基づいて設定する出力特性制御手段(ステップS6,S7,S8)を設けた。
(もっと読む)
車両の駆動制御装置
【課題】回転電機の出力特性の切替えに関連する車両のショックが抑制される車両の駆動制御装置を提供する。
【解決手段】電子制御装置による電動機出力特性切替制御において、駆動輪に動力伝達可能に連結された第2電動機M2を動力源として備える車両において、第2電動機M2の出力特性の切替えが、その第2電動機M2から駆動輪へ伝達されるトルクが所定値以下のトルク低下状態で実行されることから、第2電動機M2の出力トルク変化が発生したとしてもそのトルク変化自体が小さく、第2電動機M2の出力特性の切替えが行われても、それに関連する車両のショックが好適に抑制される。
(もっと読む)
ハイブリッド車両における回生システム
【課題】クラッチの接続・非接続にかかわらずフリクションを抑えて回生量を十分に大きくとることができるハイブリッド車両における回生システムを提供する。
【解決手段】エンジン22と、モータ106と、エンジン22からの動力を後輪WRに伝達させるかを切り換えるクラッチ104と、クラッチ104を制御して、該クラッチ104の接続、非接続を行うクラッチアクチュエータ120と、エンジン22及びモータ106の駆動制御を行うとともに、クラッチアクチュエータ120を制御するMG−ECU102とを備えたハイブリッド車両における回生システム100において、MG−ECU102は、クラッチ104が接続の状態の場合は、モータ106を駆動制御してモータ106に回生を行わせるとともに、エンジン22を駆動制御して運転状態にし、クラッチ104が非接続の状態の場合は、モータ106を駆動制御して前記モータ106に回生を行わせる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ベルトの寿命の残りが少ない場合に、ベルトを延命させることができるハイブリッド車両の制御装置を提供すること。
【解決手段】ハイブリッドECUは、タイミングベルトの有効張力を検出し(ステップS11)、タイミングベルトの有効張力を積算し(ステップS12)、積算した有効張力積算値が、寿命判定値以上であるか否かを判定し(ステップS13)、有効張力積算値が寿命判定値以上であると判定した場合には、タイミングベルトが寿命に達したと判定し、エンジン回転数がタイミングベルトを共振させる回転数に近いか否かを判定し(ステップS16)、エンジン回転数がタイミングベルトを共振させる回転数に近いと判定した場合には、エンジン回転数を変更する(ステップS17)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 連続変速時であってもショックを回避可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータとの間の駆動力の伝達を断接する第1クラッチと、モータから駆動輪へ伝達される駆動力の伝達を断接する第2クラッチと、自動変速機の変速中に、第2クラッチをスリップ状態とするスリップ制御手段と、を備えたハイブリッド車両の制御装置において、スリップ制御手段は、現在の変速と次の変速とを連続で行う連続変速中に、現在の変速が終了した後、かつ、次の変速が終了する前に第2クラッチのスリップ状態を完全締結状態に移行させる場合には、第2クラッチの締結圧を徐々に上昇させることとした。
(もっと読む)
ハイブリッド自動車
【課題】吸気温が低く内燃機関から過大なパワーが出力されるために内燃機関の運転を制限する制御を行なう場合に安定して制限する制御から通常の制御に移行させる。
【解決手段】処理ルーチンをN回実行する時間毎にその間に記憶された吸気温Ta(n)のうち最小のものを目標温度Ta*として設定すると共に(S350)、設定用温度Tsetをレートリミット処理により目標温度Ta*とし(S370〜S390)、設定用温度Tsetが閾値Tref未満のときには設定用温度Tsetに基づく制限パワーPlimと制限回転数Nlimの運転領域内でエンジンを運転しながら走行するよう制御し(S420)、設定用温度Tsetが閾値Tref以上のときには定格値としての最大パワーと最大回転数とを制限パワーPlimと制限回転数Nlimとして用いた運転領域内でエンジンを運転しながら走行するよう制御する(S410)。
(もっと読む)
車両
【課題】モータジェネレータの回転速度を制限する。
【解決手段】車両は、運転者が操作するスイッチと、スイッチが操作されると停止するエンジンと、モータジェネレータと、エンジン回転速度がゼロから増大するとモータジェネレータの回転速度が減少するようにエンジンの出力軸とモータジェネレータの出力軸とを連結する動力分割装置と、スイッチを操作することによってスイッチエンジンが停止した状態でモータジェネレータの回転速度が増大した場合、エンジン回転速度がゼロから増大するように制御するECUとを備える。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車にて、実際のクラッチトルク特性の変化によってクラッチ操作部材の操作に対する「駆動輪に伝達される駆動トルク」の推移に変化が発生することの抑制。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。クラッチトルク基準特性(マップ)にクラッチ戻しストローク検出値を適用してクラッチトルク基準値が決定される。このクラッチトルク基準値と「EGの出力軸の駆動トルク検出値」とのうちで小さい方の値が「CT通過後基準EGトルク」として決定される。MGトルクは、CT通過後基準EGトルクから、M/Tの入力軸の駆動トルク検出値(CT通過後実EGトルク)を減じた値に調整される。これにより、CT通過後EGトルクの誤差が補償され得る。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両の走行中に内燃機関の始動に伴うショックの発生を抑制すると共に運転停止されていた内燃機関をより適正に始動させる。
【解決手段】エンジンの運転停止中におけるエンジンの始動判定に際して要求走行パワーと比較される始動判定パワーPref1は、当該始動判定パワーPref1をリングギヤ軸のトルクに換算することにより得られる換算始動判定トルクTc1が車速Vが高いほど小さくなるように設定され、エンジンの始動判定に際して要求トルクと比較される始動判定トルクTref1は、車速Vが間欠禁止車速Vrefよりも低い基準車速V0以下であるときに換算始動判定トルクTc1以下となると共に車速Vが基準車速V0を上回っているときに換算始動判定トルクTc1よりも大きくなるように設定される。
(もっと読む)
トルク立上り予測方法およびエンジン始動方法
【課題】油浴状態で配設される油圧式摩擦係合装置の伝達トルクの立上り変化を高い精度で予測できるようにする。
【解決手段】K0クラッチを係合させてエンジンをクランキングする際に、そのK0クラッチの伝達トルクTK0が立ち上がる前の所定の積分時間TiA内に油圧シリンダに加えられるK0クラッチ油圧PK0の積分値Ipk0を算出し、そのK0クラッチ油圧積分値Ipk0および油温Toに基づいて伝達トルクTK0の立上り変化(応答時間tdおよび立上り勾配φ)を予測する。これにより、ピストンの動作遅れや油膜圧の存在に拘らず伝達トルクTK0の立上り変化を高い精度で予測でき、その伝達トルクTK0の立上り変化に伴う駆動力変動をモータジェネレータによって適切に抑制することができる。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】アクセルペダルが踏み込まれた状態でハイブリッド車両が減速走行するときに部品保護やエネルギ効率の改善を図る。
【解決手段】モータ出力パワーPmg1が閾値Pref以上であってモータMG1が比較的高い回転数で回転しながら正のトルクを出力しており(ステップS130)、モータMG2の回転数変化量ΔNm2が閾値ΔNref未満であり(ステップS150)、かつモータMG2の回転数Nm2が閾値Nref未満である場合(ステップS160)、運転者によりアクセルペダルとブレーキペダルとの双方が同時に踏み込まれたのに伴ってモータMG1およびモータMG2の双方が電力を消費して正のトルクを出力するとみなされ、モータMG2に対するトルク指令Tm2*が減少側に補正される(ステップS170)。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】ハイブリッド車両の車速制限制御時において、より適切にエンジン運転状態を制御する。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両の走行速度を、ステアリングスイッチ28で設定されたリミッタ車速以下で維持するように自動調整する制御であるASL制御を行っているときに、アクセルペダル33の操作に応じたドライバ要求トルクと、車速制限時の駆動トルクである車速リミッタトルクとのセレクトローによって決定される目標駆動トルクから逆算して求められる擬似アクセル開度VAPOに基づき、エンジン1を始動するか又は停止するかのいずれかの判定を行う。
(もっと読む)
1 - 20 / 1,876
[ Back to top ]