
Fターム[5H115SE09]の内容
車両の電気的な推進・制動 (204,712) | 主な制御対象 (12,865) | 動力伝達装置 (2,547) | 動力の切換又は分配するもの (1,025)
Fターム[5H115SE09]に分類される特許
1 - 20 / 1,025
車両
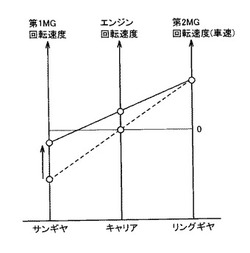
【課題】モータジェネレータの回転速度を制限する。
【解決手段】車両は、運転者が操作するスイッチと、スイッチが操作されると停止するエンジンと、モータジェネレータと、エンジン回転速度がゼロから増大するとモータジェネレータの回転速度が減少するようにエンジンの出力軸とモータジェネレータの出力軸とを連結する動力分割装置と、スイッチを操作することによってスイッチエンジンが停止した状態でモータジェネレータの回転速度が増大した場合、エンジン回転速度がゼロから増大するように制御するECUとを備える。
(もっと読む)
ハイブリッド車両の制御装置

【課題】 連続変速時であってもショックを回避可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータとの間の駆動力の伝達を断接する第1クラッチと、モータから駆動輪へ伝達される駆動力の伝達を断接する第2クラッチと、自動変速機の変速中に、第2クラッチをスリップ状態とするスリップ制御手段と、を備えたハイブリッド車両の制御装置において、スリップ制御手段は、現在の変速と次の変速とを連続で行う連続変速中に、現在の変速が終了した後、かつ、次の変速が終了する前に第2クラッチのスリップ状態を完全締結状態に移行させる場合には、第2クラッチの締結圧を徐々に上昇させることとした。
(もっと読む)
動力伝達装置
【課題】体格が小さく、長期に亘り初期性能を維持可能な動力伝達装置を提供する。
【解決手段】クラッチ50は、軸方向の少なくとも一部が収容空間35に位置する筒部511を有しエンジン11の出力軸112に接続されるドラム51、筒部511の内壁および第2筒部333の外壁に接続するよう設けられる摩擦係合要素52、および、摩擦係合要素52に押し付けられることで摩擦係合要素52を係合させることが可能な環状の押付部材53を有している。押付部材53は、筒部511の内壁との間に環状の第1隙間531を形成している。押付部材53の摩擦係合要素52とは反対側には、油圧空間56が形成されている。油圧空間56に作動油が供給されることで押付部53材が摩擦係合要素52に押し付けられることにより摩擦係合要素52が係合し、エンジン11の出力軸112とロータシャフト33とが連結する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンの動作点の移動及び機械式変速機構の変速制御を同時に行う過程で、燃費の悪化を抑制しつつ好適な変速を実現する。
【解決手段】エンジン動作点の移動及び自動変速機18の変速制御を同時に行う過程で、3つの回転要素CA0,S0,R0のうちの1つの回転速度が他の回転速度と変化方向が異なる場合には、動力伝達装置11における入力パワー(例えばエンジンパワー)よりも自動変速機18における駆動伝達パワーが大きくされるので、3つの回転要素CA0,S0,R0の回転速度の回転方向に拘わらず変速中のパワー収支を安定させることができる。よって、エンジン動作点の移動及び自動変速機18の変速制御を同時に行う過程で、燃費の悪化を抑制しつつ好適な変速を実現することができる。
(もっと読む)
車両用駆動操舵アクチュエータ
【課題】1つの電動モータにより駆動力と操舵力を自在に制御することができ、しかも、電力消費が少ない車両用駆動操舵アクチュエータを提供する。
【解決手段】車輪駆動ユニット200は、電動モータ11の回転を減速して車輪12へ伝達する第1の遊星ギヤ機構13を備え、操舵機構210は、操舵に応じて作動され、電動モータの回転を増減速する無段変速機15と、電動モータの回転動力が直接入力される第1入力部、電動モータの回転動力が無段変速機を介して入力される第2入力部および操舵ユニットを操舵する操舵部材に連結された出力部を有する第2の遊星ギヤ機構17とを備えている。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車にて、実際のクラッチトルク特性の変化によってクラッチ操作部材の操作に対する「駆動輪に伝達される駆動トルク」の推移に変化が発生することの抑制。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。クラッチトルク基準特性(マップ)にクラッチ戻しストローク検出値を適用してクラッチトルク基準値が決定される。このクラッチトルク基準値と「EGの出力軸の駆動トルク検出値」とのうちで小さい方の値が「CT通過後基準EGトルク」として決定される。MGトルクは、CT通過後基準EGトルクから、M/Tの入力軸の駆動トルク検出値(CT通過後実EGトルク)を減じた値に調整される。これにより、CT通過後EGトルクの誤差が補償され得る。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、ワンウェイクラッチが係合ロック状態のときクラッチスリップを維持しつつ、ワンウェイクラッチが係合ロック解除状態から再び係合ロック状態に移行した際に車両挙動の急変を防止すること。
【解決手段】ハイブリッド車両はエンジンおよびモータジェネレータ、第2クラッチおよびワンウェイクラッチを備え、制御装置は目標CL2トルク容量演算部404を有するクラッチ動作制御手段、を備え、目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、ワンウェイクラッチが係合ロック解除状態であると検出されたとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施を停止する。
(もっと読む)
トルク立上り予測方法およびエンジン始動方法
【課題】油浴状態で配設される油圧式摩擦係合装置の伝達トルクの立上り変化を高い精度で予測できるようにする。
【解決手段】K0クラッチを係合させてエンジンをクランキングする際に、そのK0クラッチの伝達トルクTK0が立ち上がる前の所定の積分時間TiA内に油圧シリンダに加えられるK0クラッチ油圧PK0の積分値Ipk0を算出し、そのK0クラッチ油圧積分値Ipk0および油温Toに基づいて伝達トルクTK0の立上り変化(応答時間tdおよび立上り勾配φ)を予測する。これにより、ピストンの動作遅れや油膜圧の存在に拘らず伝達トルクTK0の立上り変化を高い精度で予測でき、その伝達トルクTK0の立上り変化に伴う駆動力変動をモータジェネレータによって適切に抑制することができる。
(もっと読む)
車両の発進制御装置
【課題】 車両発進時のクラッチジャダーを抑制できる車両の発進制御装置を提供する。
【解決手段】 車両の発進時、モータジェネレータMGと左右後輪RL,RRとの間に介装した第2クラッチCL2をスリップ締結状態からロックアップ締結状態へと移行させる車両の発進制御装置において、クラッチジャダーの発生が予測または検出された場合には、予測または検出されない場合よりもスリップ締結状態からロックアップ締結状態への移行時間を短くする。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保すること。
【解決手段】ハイブリッド車両の制御装置は、エンジンおよびモータジェネレータと、第2クラッチと、目標CL2トルク容量演算部404を有するクラッチ動作制御手段と、を備える。目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を停止する。
(もっと読む)
電気自動車の制御装置
【課題】モータと変速機を備えた電気自動車において、クラッチを不要にして構成を簡易にすると共に、重量やコストの増加を抑制するようにした電気自動車の制御装置を提供する。
【解決手段】少なくとも運転者に操作されるアクセルペダルの開度に応じて車両に搭載されるモータの出力を制御するモータ出力制御手段と、変速指示がなされたとき、複数個の変速段ギヤを切り替える噛み合い式クラッチを有する変速機と、車両を制動可能な機械的なブレーキの動作を制御するブレーキ制御手段とを備えた電気自動車の制御装置において、モータ出力制御手段は、モータを回生させている間に変速指示がなされたとき(S10,S12,S18)、噛み合い式クラッチが複数個の変速段ギヤを切り替える前にモータの出力を零あるいはその近傍からなる所定値に制御すると共に(S22)、ブレーキ制御手段にブレーキを作動させる(S20)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ノーマル運転パターンと判定される通常運転中でも、運転者が高応答運転モードを選択すると、ハイブリッド走行領域を拡大する。
【解決手段】高応答運転モードModehr選択中であって、動力性能重視運転パターンPat(PWR)および燃費重視運転パターンPat(ECO)の中間的なノーマル運転パターンPat(NOR)である場合、エンジン始動線として中間用エンジン始動線を選択し、Modehr選択中にノーマル運転パターンPat(NOR)である場合のハイブリッド走行領域を、燃費重視運転パターンPat(ECO)でのハイブリッド走行領域よりも拡大させる。このため、Pat(NOR)と判定される通常運転中でも、運転者がModehrを選択すると、エンジン動力を用いたハイブリッド走行が行われ易くなる。
(もっと読む)
ハイブリッド車両用電動モータ駆動装置及び該装置を備えたハイブリッド車両
【課題】 簡単かつ安価で軽量コンパクトな構成でありながら、既存の自動二輪車等の車両の動力伝達系に対して変更を伴うことなく、良好に電動モータの出力を駆動力として作用させることができるハイブリッド車両を提供する。
【解決手段】 本発明に係るハイブリッド車両は、内燃機関2と電動モータ20とを動力源として備えるハイブリッド車両1であって、電動モータ20により車輪11に駆動力を付与する電動モータ駆動装置10が、車輪11の車軸と略平行な回転軸廻りに回転可能に構成され、少なくとも1つの車輪11の外周付近に当接する駆動ローラ15と、駆動ローラ15を駆動する電動モータ20と、を含んで構成されることを特徴とする。
(もっと読む)
ハイブリッド自動車
【課題】こもり音の発生を回避しつつ、運転者や乗員に違和感を与えるのを抑制する。
【解決手段】車速Vが閾値Vref未満の低車速走行時にエンジンを燃費最適動作ラインで運転して車両要求パワーPe*を出力するとエンジンの運転ポイントがこもり音領域内となるときには、エアコン要求パワーPa*より小さな値の補正用パワーPalimをエアコン要求パワーPa*の代わりに用いて車両要求パワーPe*が小さくなるよう再設定(補正)し(S150)、この再設定(補正)した車両要求パワーPe*と燃費最適動作ラインからこもり音領域を回避して得られる実行用動作ラインを用いてエンジンの目標回転数Ne*や目標トルクTe*を設定すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*を設定してエンジンやモータMG1,MG2を駆動制御する(S160〜S210)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】運転者の意思等に応じて、NVの抑制と応答性の向上とを調整可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える場合、クラッチを係合してからエンジンを始動させる。そして、制御手段は、騒音又は/及び振動の抑制を優先すべき状態では、エンジン回転数を略0にしてから、クラッチを係合状態にし、エンジンを始動させる。
(もっと読む)
ハイブリッド自動車
【課題】リバース走行する際に第1の電動機にロック故障が生じていないことを確かめた上でリバース走行を許可し、第1の電動機にロック故障が生じているときにリバース走行することによって内燃機関が逆回転して破損するのを防止する。
【解決手段】運転者がシフトレバーをリバース走行用のポジション(Rポジション)に変更したときにモータMG1からエンジンをクランキングする方向のトルクを出力し(S110)、所定時間が経過するまでにモータMG1の回転数Nm1が閾値Nref以上に至ったときにはモータMG1にロック故障が生じていないと判断してリバース走行を許可し(S160)、所定時間が経過するまでにモータMG1の回転数Nm1が閾値Nref以上に至らないときにはモータMG1にロック故障が生じていると判断してリバース走行を禁止する(190)。
(もっと読む)
動力伝達装置
【課題】ダンパ機構の偏心荷重が入力軸に加わった場合に、中空支持部および環状支持部が変形するのを抑制して、遊星歯車機構の噛み合いの悪化によるNV性能および耐久性の悪化を防止することができる動力伝達装置を提供すること。
【解決手段】トランスアクスルは、インプットシャフト28をケース25の中空支持部25cに支持するニードルベアリング55と、中空支持部25cの外周部に形成されたケース25の環状支持部25bにリングギヤ23Rの内周部を支持するボールベアリング53との回転中心軸を、インプットシャフト28の軸線方向に離隔させるとともに、ニードルベアリング55を回転中心軸の軸線方向中央部をケース25の壁部25dの軸線上に位置させたものから構成される。
(もっと読む)
ハイブリッド自動車
【課題】停車中に押し当てトルクの出力と出力の解除とが頻繁に繰り返されるのを抑制する。
【解決手段】エンジンの回転数Neが値0より大きい場合には(S110)、バッテリの出力制限Woutが閾値Wref以上のときに押し当てトルクTpに所定トルクTsetを設定して押し当て制御を実行し(S140,150)、押し当て制御の実行中に出力制限Woutが閾値Wref未満となったときに押し当て制御を解除して実行を制限し(S160〜180)、実行制限した以降所定時間Trefが経過するまでは出力制限Woutが閾値(Wref+α)以上となったときに押し当てトルクTpに所定トルクTsetを再設定して押し当て制御を再実行するから(S190〜210)、押し当て制御の実行と解除とが頻繁に繰り返されるのを抑制することができる。
(もっと読む)
トルク異常検知装置および輸送機器
【課題】動力源に掛かる負荷トルクの異常を検知可能なトルク異常検知装置および輸送機器を提供することである。
【解決手段】トルク異常検知装置10は、動力源に掛かる負荷トルクを推定する負荷トルク推定手段12と、動力伝達手段30,30a,50,55によってシステム外部60との動力の伝達を切断する状態で、負荷トルク推定手段12によって推定される負荷トルクに基づいて動力源に掛かる負荷トルクの異常を検知する負荷トルク異常検知手段13とを有する。システム外部60との間で動力の伝達が切断されるので、システム外部60の変動や変化等による影響を受けない。よって、負荷トルクを精度良く推定でき、負荷トルク異常検知手段13は何らかの故障等が起きたことを的確に検知できる。
(もっと読む)
1 - 20 / 1,025
[ Back to top ]