
Fターム[5H115SF01]の内容
車両の電気的な推進・制動 (204,712) | 車両の制御 (610) | 速度制御 (326)
Fターム[5H115SF01]の下位に属するFターム
地形に応じたもの (84)
天候に応じたもの (7)
パターンを用いるもの (97)
閉塞区間で制限速度が与えられるもの (30)
Fターム[5H115SF01]に分類される特許
1 - 20 / 108
トランスポンダ装置及び車両制御装置
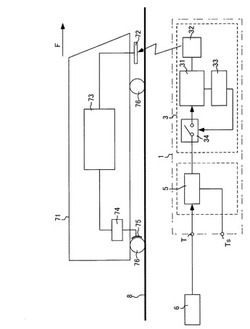
【課題】内部回路の動作状態を監視し、外部に知らせることができ、しかも、符号処理器を必要としない小型、かつ、安価なトランスポンダ装置及びそれを用いた車両制御装置を提供すること。
【解決手段】電文設定送信部31と、監視部5とを含むトラスポンダ装置であって、電文設定送信部31は、電源供給部6から電源の供給を受けて動作し、予め準備された電文信号を送信する。監視部5は、電源供給部6から電文設定送信部31に供給される電流を監視し、その監視結果を出力端子Tsから外部に出力する。
(もっと読む)
電気車制御装置

【課題】インバータ周波数で発生するトルクリップルに起因する騒音を抑制する。
【解決手段】実施形態に係る制御装置は、電気車の主電動機を駆動する可変電圧可変周波数インバータ(VVVFインバータ)を制御する電気車制御装置であって、運転台からのノッチ指令値及び現在の速度に基づいて、前記インバータの第1電流指令値を演算する電流演算部11と、ノッチ指令0が入力された時、前記第1電流指令値を一定の傾きで減少させ、第2電流指令値を提供する電流制御部12と、前記電流制御部12からの前記第2電流指令値に基づいて、インバータゲート指令を生成するベクトル制御部13と、前記ノッチ指令0が入力された時、前記第1電流指令値又は前記インバータの出力電流実際値に基づいて、前記インバータへのゲート指令をオフするまでの時間を演算するオフ時間演算部16と、前記ノッチ指令0が入力された時から、前記オフ時間演算部にて演算された時間経過後、前記インバータへのゲート指令をオフする時間計測部14とを具備する。
(もっと読む)
移動体制御システム
【課題】速度発電機やGPS、加速度センサ、ドップラーレーダーなどの位置推定手法は、列車状態や周辺環境などによって推定精度が常に変化するため、走行前に適切な誤差を想定して安全余裕距離として設定することが難しく、過剰な安全余裕距離が設定され、運行密度が低下する可能性がある。
【解決手段】車上装置1は、位置推定装置11と位置精度評価装置12と送信装置14と受信装置15と停止目標情報を元に列車の走行速度を制御する速度制御装置13とを有し、地上装置2は、各列車からの列車位置情報及び位置精度情報を受信する受信装置21と受信情報を元に各列車の在線確率を算出する在線確率算出装置22と在線確率情報を元に停止目標を算出する停止目標算出装置23と停止目標を送信する送信装置24とを有し、位置推定精度が走行中に変化した場合、その変化に追従して最適な停止目標を算出する。
(もっと読む)
倒立振子型移動体
【課題】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら走行制御が行われる倒立振子型移動体において、搭乗者の意思に基づく操縦モードと、搭乗者の意思に基づかない自動運転モードとを実現することができる倒立振子型移動体を提供する。
【解決手段】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら車体の走行制御が行われる倒立振子型移動体において、制御装置から出力される操作信号に従って搭乗者の重心位置を調節するための重心位置調節手段を備え、制御装置は、搭乗者の意思に基づかないで所定の走行制御を行う自動運転モードへの切り換え指令が生成されたときに、目標となる走行状態が実現される重心位置となるように重心位置調節手段を制御し、重心位置に基づく走行指令に従って車輪駆動手段の制御を行う。
(もっと読む)
列車の定速走行制御方法及び装置
【課題】次の駅間に進入する際の目標速度が、次の駅間距離を運転時分で割った、次の駅間の平均速度になるように目標速度を設定する列車の定速走行制御方法及び装置を提供する。
【解決手段】定速走行制御においては、制限速度信号及び車両の走行速度の入力により定速で走行する指令を車両駆動制御装置に出力し、駅間距離を運転時分で割った平均速度を求めて目標速度とし、その速度で定速走行制御を行うことで定時運転を行う。B駅303通過に際しては、定時でB駅303を通過した場合の次駅間の目標速度310を予め求めておき、現在の列車速度315から加速した場合に、次の駅間に進入するまでに列車速度が次駅間の目標速度310まで加速可能となる地点からの残距離312区間の目標速度314を、先に求めた平均速度(目標速度310)とするので、次駅間での列車速度が早期に目標速度に追従し、列車の定速定時走行を確保することができる。
(もっと読む)
列車制御システム
【課題】車上制御装置と拠点装置とが無線通信を用いて効率よく情報を授受できる列車制御システムを提供する。
【解決手段】列車制御システムは、列車に搭載した車上制御装置21と地上に設置した拠点装置12Aを有する。車上制御装置の第1の送信手段は列車状態情報に列車識別情報を付加した列車側情報をブロードキャストし、第1の受信手段は制御情報を受信する。列車制御手段は、列車識別情報が付与された制御情報に基づいて列車を制御する。拠点装置は、第2の受信手段と記憶手段と生成手段と第2の送信手段とを有する。第2の受信手段は、列車からブロードキャストされる情報を複数の無線通信局13A1〜BXで受信する。記憶手段は、受信した列車側情報を記憶する。生成手段は、受信した列車側情報に含まれる列車状態情報に基づいて列車に対する制御情報を生成する。第2の送信手段は、生成した制御情報に列車識別情報を付加してブロードキャストする。
(もっと読む)
物品搬送装置
【課題】台車ユニットの走行時に、外部からの操作により台車ユニットを停止させることができる物品搬送装置を提供すること。
【解決手段】搬送経路に沿って配設された走行レール3と、走行レール3を走行可能な台車ユニット4と、を備え、物品2を台車ユニット4に積載して搬送経路に沿って搬送する物品搬送装置1において、台車ユニット4は、台車ユニット4を走行させる駆動手段17と、駆動手段17に電力を供給する蓄電手段5と、蓄電手段5から駆動手段17に供給される電力の制御を行う制御回路29と、制御回路29に接続される台車用無線モジュール41と、を有し、台車用無線モジュール41は、受信される操作信号に基づいて、制御回路29の操作を行う。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行などの自動走行に移行する際に、運転者に与える違和感を抑えることを可能とする。
【解決手段】運転者によるステアリングスイッチ28の操作によって定速走行に移行する際に、エンジン停止の処理中若しくはエンジン停止処理に移行したと判定すると、EVモードに移行することなく、エンジンを運転状態に復帰させる処理を行う。
(もっと読む)
トルク制御装置及びトルク制御方法
【課題】適切なトルク低減により、好適な変速を達成する。
【解決手段】エンジン(1)と、モータ/ジェネレータ(5)と、前記エンジンのトルクと前記モータ/ジェネレータのトルクが入力する変速機(3)とを有する車両のアップシフト時のイナーシャフェーズにおいて、前記両方のトルクを制御可能なトルク制御装置であって、前記変速機の入力軸の目標角加速度を設定する角加速度設定手段(20;S3)と、前記エンジンのトルクの低減だけで前記目標角加速度が達成できる場合、前記エンジンのトルクを低減させる第一のトルク低減手段(20;S6)と、前記エンジンのトルクの低減だけで前記目標角加速度が達成できない場合、前記エンジンのトルクとモータ/ジェネレータのトルクを低減させる第二のトルク低減手段(20;S7)と、を備える。
(もっと読む)
定速走行制御装置
【課題】定速走行制御装置では、手動運転における支援的な機能の場合、取り扱いによっては、手動運転と定速走行制御装置における自動制御を切り替える操作が発生するため、車両駆動制御装置の手動運転向けノッチ曲線を、ATO向けに切り替えずに用いて制御する必要がある。
【解決手段】定速走行制御装置において、目標速度204を複数の速度帯304に分割し、車両駆動制御装置の各ノッチの速度−引張力曲線301と、走行抵抗曲線302の交点303に基づいてそれらの速度帯304を設定し、その速度帯1〜5ごとにノッチを算出する制御計算を設定して制御に用いることで、目標速度204に追随して一定の速度で走行できる。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に一時加速してから、再びクルーズ走行に復帰する際の違和感を抑制する。
【解決手段】クルーズ要求トルクTcがアクセル要求トルクTaよりも大きい状態から(S14の判定が“No”)、アクセル要求トルクTaがクルーズ要求トルクTcよりも大きくなり、一時加速した場合には(14Sの判定が“Yes”)、禁止フラグをFNG=1にセットし(S25)、許可フラグはFOK=0にリセットする(S26)。その後、運転者のアクセル操作が解除されても(S35の判定が“Yes”)、自車速がクルーズ要求トルクTcに従ったクルーズ要求車速に戻るまでは(S29の判定が“No”)、禁止フラグがFNG=1、及び許可フラグがFOK=0の状態を保持し、一時加速後のエンジンの停止を禁止する(S37)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 運転者の要求する走行状態を応答よく実現可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 ハイブリッド車両が車速指令値に基づいて走行制御をしているモータ走行モードにおいて、駆動トルク指令値に運転者が所定加速を要求したときの加速用駆動トルクを加算した値がモータ駆動分上限値を越えたときはエンジン併用走行モードを選択することとした。
(もっと読む)
電気車用制御装置
【課題】 1km/h程度の極低速での一定速運転を行い、かつ負荷の変動に対してもダイナミックな応答を提供できる定速制御方法を有する電気車用制御装置を提供することである。
【解決手段】 車軸に取付けられ、車輪を駆動するための駆動力を生成する主電動機
2〜7と、車軸ごとに取り付けられた主電動機2、3、4、5、6、7の個別制御を行う制御ユニット89、10、11、12、13と、目標速度を現在速度に対し比例積分制御を行い、そのうち積分制御を列車制御監視システムの持つ編成共通の速度情報で行い、比例制御を各制御単位の速度センサで行う列車制御監視システム1を有する。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に設定車速が増加し、その設定車速を達成するまでの違和感を抑制する。
【解決手段】モータ2のみを駆動し、EVモードでクルーズ走行している状態で、運転者のスイッチ操作によって設定車速Vsが増加したら(S11、S13、S16の全てが“Yes”)、禁止フラグをFNG=1にセットしてエンジン1の始動を禁止する(S29)。このとき、モータトルク上限値TLを増加補正する(S24、S25)。車速Vが設定車速Vsまで増加し(S28の判定が“No”)、且つクルーズ要求トルクTcが始動判定閾値TONより小さければ(S36の判定が“No”)、加速期間が終了したと判断して、モータトルク上限値TLを増加補正前の通常値に復帰させる(S31)。
(もっと読む)
車両用走行制御装置
【課題】ハイブリッド車両において、実際のエンジントルクの変動に伴うエンジン停止・始動のハンチングを抑える。
【解決手段】目標とする走行状態が予め設定したエンジン停止判定値以下の場合には、エンジンによる駆動輪の駆動を停止する。このとき、目標エンジントルクと実際のエンジントルクとの間の推定される偏差に基づき、上記エンジン停止判定値を補正する。
(もっと読む)
定速走行制御装置
【課題】車両駆動制御装置に出力する定速走行制御装置において、上位の制限速度から下位の制限速度に移行させる際、正確な運行時間を維持した上で不要な加減速を防止して、下位の目標速度に円滑かつ確実に追随させる。
【解決手段】制限速度信号202が、制限速度の高い上位の制限速度信号から、制限速度の低い下位の制限速度信号に切り換わる場合に、上位の制限速度信号に基づく目標速度と下位の制限速度信号に基づく目標速度に基づいて、予め減速するのに必要な距離を算出し、車両がこの距離を走行する間に、車両の速度に応じて、車両のブレーキ量を所定の初期値から解除に到るまでに段階的に切り換えるようにした。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】急な加減速を抑制して芝の損傷を防止することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ペダル(後進アクセルペダル17、前進アクセルペダル18、及びブレーキペダル19)の操作量に応じた走行用の駆動力を発生するモータ41と、車両の速度を検出する速度センサ36と、速度センサ36の検出結果とペダルの操作量とに基づいて目標とすべき車両の加減速度を算出する加減速度算出部38aと、速度センサ36の検出結果に応じて車両の加減速度の上限値及び下限値の少なくとも一方を設定する制限値設定部38bと、加減速度算出部38aの算出結果が上限値又は下限値を超えている場合には、目標とすべき車両の加減速度を上限値又は下限値に制限してモータ41を制御するモータ制御部38cとを備える。
(もっと読む)
内燃機関の出力制御装置
【課題】発電機の発電時に内燃機関の出力を制御する内燃機関の出力制御装置において、内燃機関をエンリッチ領域で運転する機会を減らし、運転効率や燃費性能を向上しつつ、排ガスの悪化を防止すること。
【解決手段】内燃機関により駆動される発電機の発電電力又は駆動用バッテリに貯蓄された電力により車両を推進可能な駆動モータを備えた電動車両にて、内燃機関の運転状態をストイキ運転からエンリッチ運転に移る境界に対応する機関出力判定値(β)を設定し、駆動用バッテリの検知されたSOC値に応じて内燃機関の出力を機関出力判定値(β)以下に制限する。
(もっと読む)
列車制御用信号検出装置および列車制御用信号検出方法
【課題】 地上子と車上子との距離などの状態にかかわらず、安定して信号を検知することのできる列車制御用信号検出装置および列車制御用信号検出方法を提供する。
【解決手段】 列車1に搭載される車上子2を介して入力された検知波形信号のピークレベルを算出するレベル算出部7と、車上子2を介して入力された検知波形信号のうちリミッタ8により一定のリミッタレベル以上の検知波形信号をリミッタレベル以下の検知波形信号に変換するリミッタレベル算出部11と、レベル算出部7から出力される検知波形信号に基づいてピーク周波数を検出してQ値を算出するとともに、リミッタレベル算出部11から出力される検知波形信号およびレベル算出部7から出力される検知波形信号をそれぞれ入力して、所定のしきい値と比較することにより、検知波形信号のレベル判定を行い、Q値およびレベル判定結果から信号の検出を行う信号検出部12と、を備えている。
(もっと読む)
電気車制御装置
【課題】電気車制御装置の定速制御は、速度域により走行抵抗の大きさが異なるため、定速目標速度との差速度に応じたトルクの均衡点が変化し、定速目標速度の精度が悪化する欠点があった。
【解決手段】本発明は以上の点を解決する為、速度域に応じた走行抵抗を加味した複数個の定速制御トルクパターンを予め用意し、定速制御開始時の速度に応じ最適な定速制御トルクパターンを選択する。定速目標速度に対する定速制御速度の精度向上効果がある。
(もっと読む)
1 - 20 / 108
[ Back to top ]