
Fターム[5H115SF11]の内容
車両の電気的な推進・制動 (204,712) | 車両の制御 (610) | 定位置停止制御 (118)
Fターム[5H115SF11]の下位に属するFターム
パターンによるもの (65)
扉と乗車位置の位置ぎめ (3)
Fターム[5H115SF11]に分類される特許
1 - 20 / 50
移動体制御システム
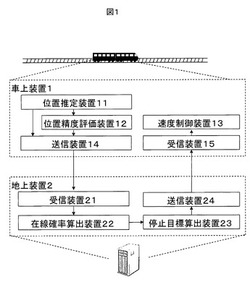
【課題】速度発電機やGPS、加速度センサ、ドップラーレーダーなどの位置推定手法は、列車状態や周辺環境などによって推定精度が常に変化するため、走行前に適切な誤差を想定して安全余裕距離として設定することが難しく、過剰な安全余裕距離が設定され、運行密度が低下する可能性がある。
【解決手段】車上装置1は、位置推定装置11と位置精度評価装置12と送信装置14と受信装置15と停止目標情報を元に列車の走行速度を制御する速度制御装置13とを有し、地上装置2は、各列車からの列車位置情報及び位置精度情報を受信する受信装置21と受信情報を元に各列車の在線確率を算出する在線確率算出装置22と在線確率情報を元に停止目標を算出する停止目標算出装置23と停止目標を送信する送信装置24とを有し、位置推定精度が走行中に変化した場合、その変化に追従して最適な停止目標を算出する。
(もっと読む)
自動列車停止装置および自動列車停止方法

【課題】変周式およびトランスポンダ式の両方式に対応したATS車上装置の更なる小型化を図ることが可能な自動列車停止装置および自動列車停止方法を得る。
【解決手段】列車で検出された速度情報20を速度照査パターンに照査して列車速度を制御するATS車上装置1を備えた自動列車停止装置であって、ATS車上装置1には、トランスポンダ式地上子からの電文を受信する車上子13と、変周式地上子の周波数に応じて変周された変周信号を検出する車上子14とが設置されており、ATS車上装置1は、車上子14から勾配補正を示す変周信号が出力された場合、この変周信号を出力した2つの変周式地上子間の距離を計測し、計測された距離に対応した勾配値で速度照査パターンを補正する。
(もっと読む)
車両停止制御装置
【課題】車両停止時において効率的な停止を行うことのできる車両停止制御装置を提供することにある。
【解決手段】車両1が惰性走行中であり(S1)、前方の信号機の表示が赤または黄である場合(S2)、当該信号機に対応する停止線までの距離(信号機距離)と、惰性走行により到達する到達距離とを比較し(S3、S4)、到達距離が信号機距離を超えるときには各種ブレーキを作動し(S5)、到達距離が信号機距離に達しない場合は駆動力を発生させるよう制御する。
(もっと読む)
共鳴型非接触受電装置の位置決め支援装置および共鳴型非接触受電装置の位置決め方法
【課題】ワイヤレスでの受電状態の良好さの程度を精度良く検出し、位置決めすることが可能な共鳴型非接触受電装置の位置決め支援装置を提供する。
【解決手段】制御装置180は、自己共振コイル112の位置の検出開始後の初期段階に、位相検波器116で測定した測定値をメモリ181に記録し、メモリ181に記録した測定値に対して現在位相検波器116で測定した測定値の符号が反転するまで初期段階よりも自己共振コイルの位置を目標方向に移動させるための制御を実行し、位相検波器116で測定した測定値の符号が反転してから受電電圧センサ190で測定した受電電圧VRに基づいて自己共振コイル112の位置合わせを行なうための制御を実行する。
(もっと読む)
車両用非接触受電装置
【課題】ワイヤレスでの受電状態の良好さの程度を精度良く検出することが可能な車両用非接触受電装置を提供する。
【解決手段】車両用非接触受電装置は、一方端と他方端を有する導電材が巻回されて形成される自己共振コイル112と、自己共振コイル112を収容する収容部600と、収容部600の内壁に設けられ、自己共振コイル112の共鳴状態を検出するための電極115とを備える。電極115は、内壁のうち、自己共振コイル112の導電材に沿ういずれかの位置であって、導電材の一方端、他方端、および一方端と他方端の中点を避けた位置に配置される。
(もっと読む)
地上子情報読取装置
【課題】フェールセーフ性能が向上された地上子情報読取装置の提供。
【解決手段】第1クロック信号に基づき送信信号および第1参照信号を出力する第1発振部と、第2クロック信号に基づき第2参照信号を出力する第2発振部と、第1クロック信号および第2クロック信号に基づいて、第1参照信号と第2参照信号とを同期させる同期手段と、第1参照信号に基づき、車上子の2次コイルが出力する検知信号を検波し、当該検波の結果に基づいて、地上子が発した地上子情報を示すデータを第1地上子情報として出力する第1受信部と、第2参照信号に基づき、検知信号を検波し、当該検波の結果に基づいて、地上子情報を示すデータを第2地上子情報として出力する第2受信部と、第1地上子情報および第2地上子情報を照合することによって、第1発振部および第2発振部の少なくともいずれか一方の故障を検知する照合監視部と、を有する地上子情報読取装置。
(もっと読む)
車両
【課題】電磁場の共鳴を利用して、車両外部に設けられた送電コイルから電力を受電可能な受電コイルが底面に配置された車両において、送電コイルに受電コイルを簡単に位置あわせすることができる車両を提供する。
【解決手段】電動車両100は、外部に設けられた送電ユニット220から非接触で電力を受電する車両であって、底面102に配置され、電磁場の共鳴により送電ユニット220から電力を受電可能な受電ユニット110、外部を撮像するカメラ120と、カメラ120が撮像した車両の外部を表示する表示部とを備え、受電ユニット110は、車両の前後方向における底面の中央部から撮像装置が設けられた周面側にずれた位置に配置される。
(もっと読む)
車両の駐車支援装置およびそれを備える車両
【課題】車両の駐車位置の位置ずれを小さく抑えることができる車両の駐車支援装置およびそれを備える車両を提供する。
【解決手段】車両の駐車支援装置は、カメラ120と、カメラ120から得られる画像で車外の送電ユニット220の位置を認識して送電ユニット220に向けて車両100を誘導するための第1の車両誘導部と、送電ユニット220から非接触状態で電力の受電を行なう受電ユニット110と、受電ユニット110の受電した電力に基づいて車両100を誘導するための第2の車両誘導部とを備える。制御部は、第1の車両誘導部が画像では送電ユニット220の位置を検出できなくなってから車両駆動部に所定距離を超えて車両を移動させても受電ユニット110が送電ユニット220から受電する電力が第1の条件を満たさない場合には、車両100の移動を停止させるための処理を行なう。
(もっと読む)
運転支援装置、方法およびプログラム
【課題】車両の後進を防止しながらエネルギー回収率を高める技術の提供。
【解決手段】車両の前方の目標位置および当該目標位置における目標車速を特定し、前記車両の現在車速を取得し、前記現在車速が所定の閾値より大きい場合に前記車両に搭載された発電機を制御して回生ブレーキのみを発生させることにより前記車両を減速させ、前記現在車速が前記所定の閾値以下である場合に前記発電機を制御して回生ブレーキを発生させ、かつ、前記車両に搭載された摩擦制動部を制御して当該回生ブレーキよりも大きい制動力の摩擦ブレーキを発生させることによって前記目標位置における車速が前記目標車速となるように前記車両を減速させる。
(もっと読む)
車両の定位置停止制御装置および定位置停止支援装置
【課題】
乗り心地を悪化させることなく、車両を目標とする停止位置に精度良く停止させる車両の定位置停止制御装置を提供すること。
【解決手段】
制御指令決定手段7は、速度・位置算出手段6の車両速度及び車両位置に基づき、最低位のブレーキ制御指令を出力したときの車両停止位置を予測し、目標停止位置に対して許容範囲を超えて手前に停止すると予測された場合に、所定時間ブレーキオフした後に最低位のブレーキ制御指令を出力したときの停止位置予測を行う。その結果、当該予測停止位置が目標停止位置に対して許容範囲に入っている場合にブレーキをオフすることを決定し、制御指令出力手段8を介して制動駆動制御装置2に対し、ブレーキオフしてから最低位のブレーキ制御指令を出力する。
(もっと読む)
車上情報集約型の高度安全列車制御システム
【課題】 知能化した車上制御装置を搭載することにより、車上にて迅速にして的確な制御を実施することができる車上情報集約型の高度安全列車制御システムを提供する。
【解決手段】 車上情報集約型の高度安全列車制御システムは、線路内障害物情報を検知する線路内障害物検出装置4と、自らの列車状態を検知する自列車状態検知装置5と、線路沿線に関する情報を収集する線路沿線に関する情報収集装置6と、先行列車13からの情報を収集する先行列車からの情報収集装置7とを取り込み処理する車上制御装置3を搭載する後続列車2で構成される。前記線路内障害物情報と前記自列車状態情報と前記線路沿線に関する情報と先行列車13からの情報とを用いて前記後続列車2の車上制御装置3が主体となり高度な安全列車制御を行う。
(もっと読む)
変周式ATS車上受信装置、変周式ATS車上装置、および変周式ATS車上受信装置の健全性診断方法
【課題】フィルタ回路の健全性を確認することができる変周式ATS車上受信装置、変周式ATS車上装置、および変周式ATS車上受信装置の健全性診断方法を得ること。
【解決手段】変周式ATS車上装置は、電源投入時に照査信号11を生成し送出する照査信号部1と、照査信号11または通常の常時発振信号のいずれかを選択する選択器2と、増幅器3と、帰還回路を形成する車上子4と、増幅器5と、増幅器5の出力信号の位相を制御する位相制御部6と、位相制御部6の出力信号の振幅を制御する振幅制御部7と、各所定周波数の信号成分を通過させるフィルタ回路8と、前記信号成分のレベルを検出するレベル検出部9と、前記レベルから信号の周波数を判別する信号判別部10と、信号判別部10による判別結果と共振周波数とを比較してフィルタ回路8の健全性を確認する制御部と、を備える。
(もっと読む)
自動列車制御装置および列車制御方法
【課題】地上装置あるいは車上装置の無線機能がシステムダウンした場合であっても、通常運転への移行時間を短縮することが可能な自動列車制御装置および列車制御方法を得る。
【解決手段】停止目標位置を演算する演算部9を有する地上装置7と、地上装置7から送信された停止目標位置を受信し速度制御パタ−ン16を演算して列車速度を制御する車上装置11、21と、を備えた自動列車制御装置であって、列車A、Bには車上装置11、21から送出された列車識別情報を送出する車上子12、22が設置され、路線には車上子12、22から送出された列車識別情報を受信する受信機能を有する地上子19、29が設置され、地上装置7は、地上子19、29が受信した列車識別情報と、地上子19、29の設置間隔に対応する列車B在線区間17および列車A在線区間27を管理する在線区間管理部10を有する。
(もっと読む)
列車総括制御システム
【課題】 列車に装備された各機器間あるいは各機能間の動作を調整し、矛盾なく統制のとれた制御を実行できる列車制御システムを提供する。
【解決手段】 自動列車運転手段44、駆動力及びブレーキ力の配分手段47、エネルギー蓄積手段、空調等の補機手段のうち、複数の手段を有する列車の制御システムであって、前記複数の手段に関する情報及び列車の外的な状況に基づいて、複数の編成指標を求め、該複数の編成指標に基づき、編成としての運転計画を決定する制御手段24を具備する。この制御手段24は、前記決定された運転計画に従い、前記複数の手段を制御する。
(もっと読む)
車上装置
【課題】 ATSシステムとATS−Pシステムとを共用する場合であっても、特別な制御が不要であり、各システムの設置スペースを小さくすることのできる車上装置を提供する。
【解決手段】 トランスポンダ式車上子4と変周式車上子3とを重ねて配置するとともに、トランスポンダ式車上子4と変周式車上子3とは、これらトランスポンダ式車上子4と変周式車上子3との電磁結合が最大となる状態の約1/100以下の電磁結合状態となる位置に設置されている。
(もっと読む)
ATSシステムの登録データ検証装置
【課題】机上又はシミュレータによらないで、現実的な妥当性検証を行うことができるATSシステムの登録データ検証装置10を提供すること。
【解決手段】検証装置10は、列車を実際の運行条件で検証対象線路を走行させ、サンプリング測位地点情報をGPS受信器から取得し記憶部に記憶する。検証装置10は、速度照査パターン発生地点などの登録位置対応情報もGPS受信器から取得し記憶部に記憶する。検証装置は、前記サンプリング測位地点情報と登録位置対応情報を表示画面上にプロット表示する。
(もっと読む)
編成車両制御装置
【課題】マスコンを操作するだけで最適速度での運転操作が容易に行え、駅ホームでの定位置停止を容易に行える編成車両制御装置を提供することである。
【解決手段】複数台の車両が連結された編成車両の速度指令を出力するマスコン13と、マスコン13からの速度指令値と編成車両の実速度との速度差の大きさに応じた加減速度を演算する加減速度演算手段18と、編成車両の荷重と加減速度演算手段18で演算された加減速度とに基づいてトルク指令を出力するトルク指令演算手段19と、トルク指令演算手段19で演算されたトルク指令に基づきブレーキ力を発生するブレーキ制御装置16と、トルク指令演算手段19で演算されたトルク指令に基づきけん引力を発生する主電動機制御装置17とを備え、電気車の速度が指令速度に到達したところで定速運転を行う。
(もっと読む)
車両制御装置
【課題】電気ブレーキから空気ブレーキへの切替によってブレーキ力が急変するような場合であっても、空気ブレーキへの切替後にブレーキの効き具合を迅速に検知することができ、その結果として停止位置の精度を向上させることができる定位置停止制御装置1を提供する。
【解決手段】定位置停止制御装置1は、電気ブレーキから空気ブレーキへの切替速度域において、ブレーキ指令決定手段25によるブレーキ指令を保持する。これにより、定位置停止制御装置1は、空気ブレーキの立ち上がり完了時に、前記ブレーキ指令に対して整定状態となる制御するとともに、空気ブレーキの立ち上がり完了後に短時間で空気ブレーキの効き具合を検知できるように制御する。
(もっと読む)
列車制御装置
【課題】車両特性モデルを使用して列車の定位置停止制御を行う場合、車両特性モデルを実際の車両特性に収束するようにそのモデルを調整する制御を行うことにより、制御性能を向上することにある。
【解決手段】車両特性モデルのパラメータをとして短期用と長期用の二種類を備え、列車の走行制御中に車両特性推定手段により推定された実際の減速度に基づいて短期用パラメータを調整し、停止時に次駅間の長期用パラメータを前駅間の短期用パラメータの調整結果に基づいて調整する。これら短期用及び長期用パラメータの双方に基づいて制御に供する車両特性モデルを調整し、これにより車両特性モデルが実際の車両特性に収束する方向に調整される。これを通じて、車両特性の短期的変動及び長期的変化の両方を考慮したモデルの調整がなされる。また、長期用パラメータを更に経過用と駅間用と分けた構成では、乗車率などその駅間特有の車両特性が車両特性モデルの調整に顕著に反映される。
(もっと読む)
停止制御装置
【課題】電気ブレーキと空気ブレーキとの切り替わったタイミングを正確に推定し、駅定点停止制御において使用すべきブレーキモデルを誤判断無く適切に選択して精度のよい駅定点停止制御を行う停止制御装置を提供する。
【解決手段】ブレーキモデル選択情報に基づき列車を目標とする地点に停車させるための停止制御に必要なブレーキノッチ指令を生成して出力する駅定点停止ノッチ制御部6とを備え、ブレーキモデル判断部20は、列車の速度を検出する列車走行速度検出部1と、速度を微分することにより減速度を算出する減速度演算部2と、減速度の波形を微分することによりジャーク波形を算出するジャーク演算部3aと、ジャーク波形に基づき電気ブレーキと空気ブレーキとの切替が発生したか否かを判断する電気ブレーキ/空気ブレーキ切替発生判断部4と、切替の判断結果に基づきブレーキモデルを選択するブレーキモデル選択部5とを有する。
(もっと読む)
1 - 20 / 50
[ Back to top ]