
Fターム[5H115SL00]の内容
車両の電気的な推進・制動 (204,712) | 伝送 (1,442)
Fターム[5H115SL00]の下位に属するFターム
地上、車上間で伝送するもの (552)
連結車両間で伝送するもの (121)
他列車間で伝送するもの (16)
伝送情報 (491)
伝送形態 (251)
Fターム[5H115SL00]に分類される特許
1 - 11 / 11
走行支援装置、走行支援方法及びコンピュータプログラム
【課題】走行予定経路の周辺環境に配慮した走行を行わせること可能とした走行支援装置、走行支援方法及びコンピュータプログラムを提供する。
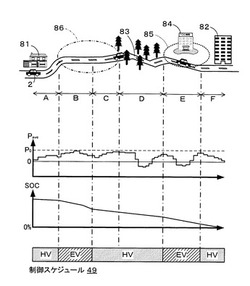
【解決手段】車両2の走行予定経路の経路情報と車両情報を取得し、取得した走行予定経路の経路情報及び車両情報に基づいて、走行予定経路を走行する場合に必要な車両2の駆動力を区間毎に推定し、推定された区間毎の車両2の駆動力が閾値以上となる区間があるか否か判定し、推定された区間毎の車両2の駆動力が閾値以上となる区間が無いと判定された場合に、走行予定経路において走行予定経路の周辺環境から駆動モータ5を駆動源とする走行を推奨するモータ走行推奨区間を特定し、特定されたモータ走行推奨区間に基づいて制御スケジュール49を生成するように構成する。
(もっと読む)
走行支援装置、走行支援方法及びコンピュータプログラム

【課題】追従走行中及び追従走行後の適切な制御スケジュールを生成することができるとともに、制御部の処理負担についても軽減することが可能な走行支援装置、走行支援方法及びコンピュータプログラムを提供する。
【解決手段】ACCシステムにより追従走行制御が実行されている場合に、追従対象となる前方車両の走行予定経路と走行情報を取得し(S25)、車両2の走行予定経路と前方車両の走行予定経路とを比較することにより追従走行区間を特定し(S27)、追従走行区間の前方車両の推定車速及び推定加速度から追従走行区間を走行する車両2の車速及び加速度を推定し(S28)、追従走行区間での追従走行制御を考慮した制御スケジュールを新たに生成する(S30)ように構成する。
(もっと読む)
車群走行支援装置
【課題】エネルギー効率の優れた車群走行を実現させることができる車群走行支援装置を提供する。
【解決手段】回生制動可能に構成された車両を有する車群の走行を支援する車群走行制御部1であって、車群内の走行順位ごとの走行計画及び車両の回生能力に基づいて回生可能な回生エネルギーを走行順位ごとに算出し、回生エネルギーに基づいて車群全体のエネルギー効率を車群内の車両の並び方ごとに算出するエネルギー効率算出部12と、エネルギー効率に基づいて車群内の車両の並び方を決定し走行を支援する走行支援部13と、を備えることで、走行順位による走行計画の違い、及び各車両の回生能力の違いを加味して車両の並び方ごとに車群全体のエネルギー効率を算出することができるので、車群全体としてエネルギー効率の良い車両の並び方を決定することが可能となる。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】蓄電装置からの電力によって車両駆動力を出力する電動機とを備えたハイブリッド車両において、排ガス出力車両を課金対象とするロードプライシングエリアの通過に備えた適切な車両準備を行なう。
【解決手段】ECUは、上記ロードプライシングエリアの通過が予測されると(S100のYES判定時)、蓄電装置の現在のSOCに基づいてEV走行に使用可能な蓄積エネルギ量を算出する(S120)とともに、EV走行によってロードプライシングエリアを通過するための必要エネルギ量を推定する(S130〜S150)。さらに、ECUは、必要エネルギに対する蓄積エネルギ量の不足分ΔWを算出し(S160)、ΔW>0のとき(S170のYES判定時)には、不足エネルギ量ΔWに対応してロードプライシングエリアの通過に備えた車両状況を準備するための車両制御を実行する(S180)。
(もっと読む)
車輌制御装置
【課題】倒立制御車輌において常に同じ制動、発進、加減速タイミング、或いは制動、発進、加減速フィーリングでの車輌操作を可能とする車輌制御装置を提供する。
【解決手段】本発明は、倒立制御車輌の車体傾斜角の角速度の制御を行う車輌制御装置であって、目標姿勢角を算出する目標姿勢角算出手段(ステップS305)と、目標姿勢角に応じた標準移動時間tCを算出する標準移動時間算出手段(ステップS306)と、目標姿勢角と現在の姿勢角との角度差ΔθCを算出する角度差算出手段(ステップS307)と、車体傾斜角速度[θ1*]を [θ1*]=ΔθC/tCによって算出する車体傾斜角速度算出手段(ステップS308)と、を有することを特徴とする。
(もっと読む)
車両
【課題】外部からの蓄電装置への充電が速やかに効率よく開始できる車両を提供する。
【解決手段】車両1は、充放電可能な蓄電装置であるバッテリBと、バッテリBから電力の供給を受けて車両を駆動する車両駆動部として動作する昇圧ユニット32、インバータ36およびモータジェネレータMG1,MG2と、バッテリBに車両外部から充電を行なうために車両と外部電源とを結合する結合部37と、バッテリBに関連する制御を行なう制御装置14とを備える。制御装置14は、目的地がバッテリBに車両外部から充電を行なうことができる充電可能地であるか否かの判断を行ない、目的地が充電可能地である場合には、目的地に到着時にバッテリBの温度が充電効率の良い温度となるようにバッテリBに関連する制御を行なう。
(もっと読む)
エネルギー蓄積器のセル結合体内の少なくとも1つのセルグループの電圧を監視する及び/又は制御又は調整する方法
特に自動車両・搭載電源機構内のエネルギー蓄積器であるエネルギー蓄積器のセル結合体内の少なくとも1つのセルグループの電圧を監視する及び/又は制御又は調整するために、本発明に従い、セントラルロジックとセルグループロジックの間のデータ通信がこれらを接続するレールラインを介して実行され、この際、最大電圧レベルに至るまではセルグループロジックがセルグループの充電又は放電のためにレールラインとエネルギーを交換するという最大電圧レベルにある又はこの最大電圧レベルより高いところにあるアイドルレベルと、このアイドルレベルより高いところにあるデータレベルとの間における電圧レベルを用いてデータ通信が実行される。 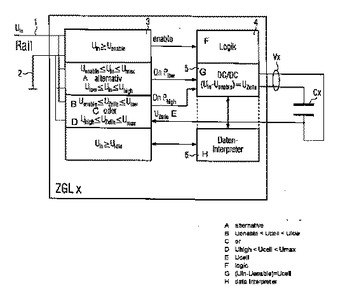 (もっと読む)
(もっと読む)
車載用電動機制御装置
【課題】
従来検討がなされていなかった車載用電動機制御装置を構成する個々の部品の劣化に起因する自動車のシステムとしてみた場合の有意な性能の低下を検知、自己診断する。
【解決手段】
電力変換器と電動機制御ユニットとからなる車載用電動機制御装置において、上記電動機制御ユニットは、制御演算部と、電動機制御装置としての最低限の機能を満たさなくなる異常を検知する異常検知手段と、所定の劣化判定基準値に基づいて車載電動機制御装置の構成部品の劣化を判定する劣化判定手段と、上記異常検出手段と劣化判定手段の出力情報に基づき、当該車載用電動機制御装置を構成する部品の異常ならびに当該車載用電動機制御装置が組みつけられた自動車が所定の性能範囲内での動作を維持できない状態を自己診断し、劣化異常状態情報を伝送する自己診断部とを備えている。
(もっと読む)
電気車駆動装置
【課題】本発明は、当該電気車駆動装置から漏れるノイズの軽減、VVVFインバータと
主電動機間の配線の容易化、更に電気車の機器の搭載スペースを有効に利用することの出
来る電気車駆動装置を提供することを目的とする。
【解決手段】直流電力を交流電力に変換するインバータと、前記インバータから供給され
る交流電力により駆動される主電動機とを有し、前記インバータは、前記主電動機の近傍
に配置されたことを特徴とする電気車駆動装置。
(もっと読む)
走行支援装置
【課題】渋滞走行時にはなるべく長くモーターによる走行を実現させるなどして、排気
ガスの減少や燃費の向上をより一層良好なものとするための、ハイブリッド電気自動車に
対する走行支援装置を提供すること。
【解決手段】ハイブリッド電気自動車に対する走行支援装置において、渋滞情報に基づ
いて、自車両の先の進路に渋滞が存在する、又は先の進路で渋滞が発生すると判断した場
合、モーター3による走行を抑制する走行抑制手段を装備する。
(もっと読む)
通知システムおよびそのシステムに用いられる車両の制御装置
【課題】 安全かつ速やかに修理作業を行なうために、コンデンサの放電状態を作業者に通知する。
【解決手段】 ECUは、診断ツールが接続されると(S1000にてYES)、異常検出ルーチンを実行するステップ(S1100)と、IGスイッチがオンでかつエンジンがオフであると(S1200にてYES)、電圧を検知するステップ(S1400)と、ダイアグコードを診断ツールに送信するステップ(S1500)とを含む、プログラムを実行する。診断ツールの制御回路は、ダイアグコードを受信して(S2100にてYES)、コンデンサの蓄電状態に基づいて、作業が可能であると(S2400にてYES)、作業可能を表示するステップ(S2500)と、作業が可能でないと(S2400にてNO)、作業待ちを表示するステップ(S2600)とを含む、プログラムを実行する。
(もっと読む)
1 - 11 / 11
[ Back to top ]