
Fターム[5H115TO06]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 車間検出 (30)
Fターム[5H115TO06]に分類される特許
1 - 20 / 30
車両停止制御装置
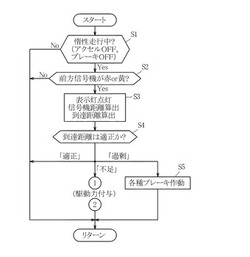
【課題】車両停止時において効率的な停止を行うことのできる車両停止制御装置を提供することにある。
【解決手段】車両1が惰性走行中であり(S1)、前方の信号機の表示が赤または黄である場合(S2)、当該信号機に対応する停止線までの距離(信号機距離)と、惰性走行により到達する到達距離とを比較し(S3、S4)、到達距離が信号機距離を超えるときには各種ブレーキを作動し(S5)、到達距離が信号機距離に達しない場合は駆動力を発生させるよう制御する。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法

【課題】定速走行制御時における頻繁なエンジンの始動・停止が行われるのを防ぐこと。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両において、走行速度をステアリングスイッチで設定された目標速度を維持するように自動調整する定速走行制御を行っているとき、エンジン1の始動後モータジェネレータ2の駆動源であるバッテリが設定したクルーズ時SOC停止判定値に充電されるまでの間、エンジン1の停止を禁止する制御を行う。
(もっと読む)
車両制御システム
【課題】車両間における制御を適切に実行させること。
【解決手段】他車の情報を車外から受信する通信装置20と、周辺の夫々の車両が共有する自車と他車の情報を用いて当該各車両間での走行制御を行う制御装置10と、を各車両に備える。そして、その制御装置には、実行中の前記走行制御に係る状況又は当該走行制御を実行中の車両の状況に応じて当該走行制御の制御形態を変更させること。例えば、その制御装置10には、走行制御の制御目標値と当該制御目標値での走行制御実行に伴う実測値とのずれに基づいて当該走行制御の制御形態を変更させる。
(もっと読む)
併合支援システムおよび併合支援方法
【課題】併合作業の効率を向上させる。
【解決手段】被併合車Bに搭載され測距機能を有するミリ波無線伝送装置4bと、併合車Aに搭載され測距機能を有しミリ波無線伝送装置4bから出力される信号に基づいて車間距離情報10Dを出力するミリ波無線伝送装置4aと、少なくとも併合車Aに搭載され力行指令18Dまたはブレーキ指令17Dを各車両に送信する列車情報管理装置6aと、車間距離情報7Dと併合車Aの速度信号15Dに基づいて残走距離を演算し残走距離に基づいて併合車Aの目標速度を算出し目標速度に追従するように力行指令5Dまたはブレーキ指令6Dを制御し列車情報管理装置6aに出力する併合支援装置とを備える。
(もっと読む)
発電所によりモーターに電力を供給し自動車を牽引する長距離移動システム
【課題】発電所によりモーターに電力を供給し自動車を牽引する長距離移動システムの提供。
【解決手段】高速道路或いは道路に軽軌道線路を敷設し、金属車輪を備えるトレーラーに軌道上を走行させ、発電所の電力を帯電レールとトレーラーに設けた集電シューを通してトレーラーに設けた変電装置に導入し、モーターでトレーラーを駆動し(普通の都市部の鉄レール輸送システム)、トレーラーの後方に自動車、ハイブリッド電気自動車、或いは電気自動車を接続し、軽軌道線路上を走行させることができ、ゆえに、走行間に自動車エンジンを停止させることができ、これにより、燃料油を必要とせずに、自動車、ハイブリッド電気自動車、或いは電気自動車を長距離移動させられるシステムを達成し、並びに牽引の過程でトレーラーの変電装置によりハイブリッド電気自動車、或いは電気自動車の電力装置に対して充電が行えるようにした。
(もっと読む)
倒立振子型移動体
【課題】他の移動体との連携動作が可能な倒立振子型移動体を提供すること。
【解決手段】通信部701(情報取得手段)により、他移動体の現在の状態(姿勢)を表す状態情報を取得する。姿勢制御演算部80(移動制御手段)は、前記状態情報に基づき、前記他移動体の現在の状態(姿勢)に対する自移動体(倒立振子型移動体)の状態(姿勢)が前記自移動体と前記他移動体とを連携動作させるために規定された所定の条件を満たすように、前記自移動体の移動を制御する。
(もっと読む)
倒立振子型移動体
【課題】 倒立振子型移動体の周囲にいる通行人等に倒立振子型移動体の走行方向を報知し注意喚起する。
【解決手段】 倒立振子型移動体1であって、フレーム2と、フレームに設けられ、任意の方向に走行させる走行ユニット3と、走行方向および走行速度を操作するための走行方向および走行速度に関する操作入力信号(傾斜角)を生じさせる傾斜センサ7と、操作入力信号に応じて走行ユニットの走行方向および走行速度に関する目標値を設定し、走行方向および走行速度を目標値の走行方向および走行速度に一致させるように走行ユニットの駆動制御を行う倒立振子制御ユニット5と、フレームに設けられたランプユニット400とを有し、制御ユニットは、走行方向に関する操作入力信号または目標値に基づいてランプユニット400の作動制御を行うことを特徴とする。
(もっと読む)
車両
【課題】車両において、最適な回生制動方法を選択しエネルギ効率を向上させる。
【解決手段】減速モードとして、ブレーキペダル操作により減速する第1の減速モードと、アクセルペダルおよびブレーキペダルの両者をオフした惰性走行状態により減速する第2の減速モードとを有する車両100であって、回転電機MG1,MG2と、蓄電装置16と、制御装置30とを備え、制御装置30は、車両100の運転状態および走行状態に基づいて、第1の減速モードにおける第1の回生電力と、第2の減速モードにおける第2の回生電力とを予測し、上記の第1および第2の回生電力の比較に基づいて、第1および第2の減速モードのいずれか一方の選択を促すように車両乗員に通知する。
(もっと読む)
燃料電池車両用冷却装置
【課題】燃料電池車両の衝突時の冷却液による絶縁抵抗低下を防止する技術を提供する。
【解決手段】冷却液循環路12は、車両に搭載されたFCスタック10を冷却する冷却液の循環路である。遮断手段20a,20bは、冷却液循環路12を電気的に遮断可能である。ECU40は、車両に設けられた各種のセンサから取得した検出値に基づいて、車両が衝突することを予測した場合に、遮断手段20a,20bにより冷却液循環路12を電気的に遮断する制御を行う。
(もっと読む)
燃料電池車輌の表示装置
【課題】燃料電池駆動の車輌においてその動力源の状態を表示するのに好適な表示装置を提供する。
【解決手段】燃料電池スタックを構成する各要素の出力をモニタして、その結果を運転席表示部に表示する。そのため、モータに対して燃料電池スタックと並列に接続されて充放電する補助出力源と、補助出力源の充放電状態を検出する第1の検出手段と、検出結果に基づいて、補助出力源からモータに対して放電状態であるか、又はモータから補助電源に対して充電状態であるかを切換えて表示する手段と、を備える。
(もっと読む)
乗り心地改善型列車制御システム
【課題】朝ラッシュ等の列車密度が高い時間帯においても、列車の遅れを発生することなく、良好な乗り心地を実現する。
【解決手段】先行列車位置推定部12は、自列車位置検知部10により検知した自列車位置に基づき、制限速度情報保持部11に保持された情報から区間の始端位置と終端位置を検索して、自列車の在線区間を特定する。先行列車位置推定部12は、地上装置3からの制限速度と予告信号に基づき、制限速度情報保持部11に保持された情報を参照して、先行列車の位置情報を推定する。先行列車情報通知部13は、先行列車位置推定部12で推定した先行列車の位置情報を運転士4に通知する。
(もっと読む)
車両用減速制御装置および車両用減速制御方法
【課題】減速燃料カット時に回生制動を行った場合に、極小踏み込みが行われると、燃料カットが終了して、燃費が悪化する。
【解決手段】車両が減速状態で、かつ、燃料供給が停止状態である減速燃料カット時に、許容減速度の範囲内で回生制動を行う装置において、オルタネータ2の回生による回生制動中に、所定開度以下のアクセルペダルの踏み込みが所定時間以下行われる極小踏み込みが行われたことを検出すると、許容減速度を小さくする。
(もっと読む)
車両
【課題】先行車両に対して安定した並走追従走行をすること。
【解決手段】追従車両3は、前後方向の制御と左右方向の制御を行うことにより、先行車両2に対して並走追従走行を行う。前後方向の制御は、フィードバック制御と、フィードフォワード制御を行う。フィードフォワード制御では、先行車両2から送信されてくる目標車速を、先行車両2が旋回する際に、追従車両3が先行車両2の内外周を走行することによる速度の増減で補正した値を用いる。左右方向の制御では、方位角φと相対角θを収束させる。この際に、追従車両3は、自車両の代表点7から先行車両2に対する目標点5までの目標点距離Δmを用いて、φとθの何れを優先的に制御するかを判断する。更に、目標点距離Δmが小さい場合、即ち、追従車両3と先行車両2が近接している場合には、φを制御する際のゲインを小さくする。
(もっと読む)
走行支援装置、走行支援方法及びコンピュータプログラム
【課題】追従走行中及び追従走行後の適切な制御スケジュールを生成することができるとともに、制御部の処理負担についても軽減することが可能な走行支援装置、走行支援方法及びコンピュータプログラムを提供する。
【解決手段】ACCシステムにより追従走行制御が実行されている場合に、追従対象となる前方車両の走行予定経路と走行情報を取得し(S25)、車両2の走行予定経路と前方車両の走行予定経路とを比較することにより追従走行区間を特定し(S27)、追従走行区間の前方車両の推定車速及び推定加速度から追従走行区間を走行する車両2の車速及び加速度を推定し(S28)、追従走行区間での追従走行制御を考慮した制御スケジュールを新たに生成する(S30)ように構成する。
(もっと読む)
車群走行支援装置
【課題】エネルギー効率の優れた車群走行を実現させることができる車群走行支援装置を提供する。
【解決手段】回生制動可能に構成された車両を有する車群の走行を支援する車群走行制御部1であって、車群内の走行順位ごとの走行計画及び車両の回生能力に基づいて回生可能な回生エネルギーを走行順位ごとに算出し、回生エネルギーに基づいて車群全体のエネルギー効率を車群内の車両の並び方ごとに算出するエネルギー効率算出部12と、エネルギー効率に基づいて車群内の車両の並び方を決定し走行を支援する走行支援部13と、を備えることで、走行順位による走行計画の違い、及び各車両の回生能力の違いを加味して車両の並び方ごとに車群全体のエネルギー効率を算出することができるので、車群全体としてエネルギー効率の良い車両の並び方を決定することが可能となる。
(もっと読む)
発電所によりモーターに電力を供給し自動車を牽引する長距離移動システム
【課題】 発電所によりモーターに電力を供給し自動車を牽引する長距離移動システムの提供。
【解決手段】発電所によりモーターに電力を供給し自動車を牽引する長距離移動システムは、金属車輪7を備えるトレーラー1がレールを使用できるよう、高速道路中央に1本の軽軌道線路3を敷設し、発電所の電力は(都市の鉄道輸送システムのように)、軽軌道線路3を経て、トレーラー1上のモーター5に伝えられ、モーター5はトレーラー1を動かし、トレーラー1を後方の被牽引自動車2に連結し、軽軌道線路3上で走行し、これにより走行中は、自動車2のエンジンを停止し、アクセルを閉じた状態でもスピーディーに前進が可能である。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席8の座面に加わる力に応じた計測信号を出力する力センサ9と、搭乗席8の座面8aの角度を変えるように、前記搭乗席を駆動する駆動部5と、駆動部5の駆動量と搭乗席8の平衡位置姿勢と力センサ9からの計測信号とに基づいて、車輪6及び駆動部5を駆動するための指令値を算出する制御計算部51と、を備えるものである。
(もっと読む)
自動車およびその制御方法
【課題】先行車両に追従する定速走行中の制御時における車両のエネルギ効率の向上を図る。
【解決手段】レーダクルーズコントロール制御によって車両に比較的大きな制動力が要求されているときには、運転者によってブレーキペダルが踏み込まれたときより小さな速度V2を置き換え車速Vchに設定し(S230)、車速Vが置き換え車速Vch以上のときには、要求制動トルクTr*の範囲内でモータを回生制御し(S150〜S170)、車速Vが置き換え車速Vch未満のときには、モータによる制動トルク(回生トルク)を油圧ブレーキによる制動力にスムーズに置き換える(S180,S190)。これにより、レーダクルーズコントロール制御中の車両のエネルギ効率を向上させることができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】自車両の減速挙動に運転者の減速意思を適切に反映させ、燃費を向上させる。
【解決手段】ハイブリッド車両の制御装置10は、運転者によるブレーキペダルおよびアクセルペダルの踏み込み操作が無く、エンジンブレーキによる自車両の減速状態での燃料供給の停止時には、電動機Mの運転状態(つまり、回生量および駆動量)を変更することで、自車両の実減速度が目標減速度G_reqに一致するように、または、先行車両に対する車間距離が目標車間距離DIST_reqに一致するようにして、単独減速制御または追従減速制御を実行し、単独減速制御または追従減速制御の実行時に運転者によるブレーキペダルまたはアクセルペダルの踏み込み操作が有る場合には、単独減速制御または追従減速制御の実行を停止して、目標減速度G_reqまたは目標車間距離DIST_reqを補正する。
(もっと読む)
駆動力制御装置
【課題】運転者のアクセル操作意識を正確に把握して、車両駆動力の制御を的確に行うことが可能な、駆動力制御装置1を提供する。
【解決手段】AP操作のパワースペクトルを算出する周波数分析部14と、運転者のAP操作意識に応じた標準パワースペクトルが記録されている巡航時データベース36とを備え、AP操作意識判断部50は、周波数分析部14により算出されたパワースペクトルと、巡航時データベース36に記録されている標準パワースペクトルとを照合して、運転者のアクセルペダル操作意識を判断し、駆動力制御部52は、運転者のAP操作意識に応じてAP開度を補正する。
(もっと読む)
1 - 20 / 30
[ Back to top ]