
Fターム[5H115TO14]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 電気的変量検出 (4,425) | 電力 (1,085)
Fターム[5H115TO14]の下位に属するFターム
無効電力、力率 (3)
Fターム[5H115TO14]に分類される特許
1 - 20 / 1,082
バッテリの充電制御装置
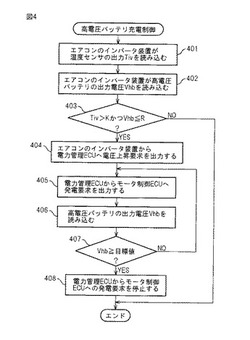
【課題】高電圧バッテリと電動コンプレッサを搭載する車両において、電動コンプレッサの能力を最大限に引き出すことができるバッテリの充電制御装置を提供する。
【解決手段】出力電圧が12Vよりも高い高電圧バッテリとエアコン用の電動コンプレッサとを搭載する車両におけるバッテリの充電制御装置において、エアコンの電動コンプレッサのインバータ装置にある制御装置にインバータ装置の温度Tivを読み込ませると共に、高電圧バッテリの出力電圧Vhbを読み込ませた後に、インバータ装置の温度Tivが所定の閾値Kより大きく、高電圧バッテリの出力電圧Vhbが所定値R以下かどうかを判定させ、Tiv>KかつVhb≦Rの時に、インバータ装置から高電圧バッテリの電圧上昇要求を出力し、車両に搭載された発電機によって高電圧バッテリを充電してその出力電圧を目標値に保持させるようにしたバッテリの充電制御装置である。
(もっと読む)
ハイブリッド自動車

【課題】内燃機関を始動する際の振動の発生を抑制する。
【解決手段】エンジンを始動する際に、クランキングトルクTmbのトルクレートΔTmbが正の閾値A1よりも大きい状態が所定時間以上に亘って継続し且つ制振トルクTmvの位相とトルクレートΔTmbの符号とが共に正で一致しているときや、トルクレートΔTmbが負の閾値B1未満の状態が所定時間以上に亘って継続し且つ制振トルクTmvの位相とトルクレートΔTmbの符号とが共に負で一致しているときには、値0よりも大きく値1よりも小さい補正ゲインGA,GBを乗じて制振トルクTmvを補正し(S140〜S220)、クランキングトルクTmbと制振トルクTmvとの和のトルクをモータMG1から出力すべきトルク指令Tm1*に設定する(S240)。
(もっと読む)
ハイブリッド自動車
【課題】内燃機関の始動制御中に内燃機関の停止が要求されたときでも内燃機関をよりスムーズに停止させる。
【解決手段】エンジンの始動制御を実行している最中にその停止が要求されたときには(S110)、停止制御開始回転数に基づいてレートリミットTlimを設定すると共にエンジンの現在の回転数Neに基づいて停止時基本トルクTsbを設定し、前回のモータMG1のトルク指令(前回Tm1*)からレートリミットTlimを減じたトルクと停止時基本トルクTsbとのうち大きい方をモータMG1から出力すべきトルク指令Tm1*に設定してモータMG1を制御する(S170〜S230)。これにより、エンジンの回転数Neをスムーズに減少させ、ショックを伴うことなくエンジンを目標停止位置により正確に停止させることができる。
(もっと読む)
ハイブリッド自動車
【課題】第1の電動機が値0を含む所定回転数範囲を脱出する制御としての保護制御が作動したときに生じ得るショックを低減する。
【解決手段】モータ回転数Nm1の絶対値が所定回転数以下の状態となるロック状態に至ったときには、モータを所定回転数Nref2または所定回転数Nref2を負の値にした回転数で回転させるようにエンジンの目標回転数Ne*や目標トルクTe*とモータの目標回転数Nm1*とを設定すると共に(S170〜S200)、モータがロック状態に至ってからの経過時間が長いほど大きくなるカウンタCに応じた値kcをモータの回転数フィードバック制御における積分項のゲインk2として用いる(S220)。これにより、ロック状態からの脱出を滑らかに行なうことができ、ロック状態からの脱出の際に生じ得るショックを抑制することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】コンデンサにおける回生電力の蓄電機能を向上させる。
【解決手段】ハイブリッド車両の制御装置(100)は、内燃機関(200)、第1電動機(MG1)及び第2電動機(MG2)と、電源手段(12)と、第1及び第2電動機の各々に対応するインバータ(710,720)及びコンデンサ(c1,c2)とを備えたハイブリッド車両を制御するものであり、回生を行うべき状態であるか否かを判定する回生判定手段(110)と、電源手段の蓄電量又は温度が所定の閾値以上であるか否かを判定する電源状態判定手段(120)と、一方の電動機で回生を行うと共に、他方の電動機の回転数をゼロに近づけるように制御する電動機制御手段(130)と、電源手段から他方の電動機に対応するインバータへの電力供給を遮断し、回生電力を他方の電動機に対応するコンデンサに蓄電させる蓄電制御手段(140)とを備える。
(もっと読む)
ハイブリッド自動車
【課題】減速中に加速要求がなされたときに車両を迅速に加速させる。
【解決手段】減速からの加速と判定したときには、エンジンを始動して必要な回転数にするまでに要する時間に相当する時間などに設定された所定時間が経過するまでは、アクセル変化量ΔAccに係数αを乗じて得られる出力補正量ΔWを基本出力制限Wobaseに加えた値として出力制限Woutを設定する(S110〜S140)。これにより、基本出力制限Wobaseを出力制限Woutとした場合に比して、大きな出力制限Woutを用いてモータのトルク指令を設定して加速することができると共にエンジンを始動して必要な回転数まで上昇させてエンジンからのパワーを加えて加速することができる。この結果、減速中に加速要求がなされたときに車両を迅速に加速させることができる。
(もっと読む)
電力分配支援装置、方法およびプログラム
【課題】電力需要がある地点に効率的に電力を分配する技術を提供すること。
【解決手段】車両が出発地点から目的地点まで走行する場合の消費電力量を取得し、前記車両に搭載されたバッテリの前記出発地点における残電力量を取得し、前記目的地点において前記車両によって運搬された電力の電力需要があるか否かを判定し、前記消費電力量が前記残電力量よりも少なく、かつ、前記目的地点において前記車両によって運搬された電力の前記電力需要があると判定された場合には、前記目的地点に到達するまでの間に前記バッテリへの充電を行うように促す案内を行う。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両の駆動トルクの変動を抑制するように、電動機および発電機のトルクを制御する。
【解決手段】HVECU70は、SMR55をオフするバッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、MG1およびMG2が電力制御トルクを出力したときと、出力しないときとの間での駆動軸32aに出力可能なトルク範囲の差分を算出し、さらに、当該差分の時間軸に対する変化量を制約した値を反映して駆動トルクの上下限範囲を定める。MG1およびMG2のトルク指令値は、当該上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように設定される。
(もっと読む)
車両の制御装置
【課題】クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】伝達トルク容量を発生するクラッチと、クラッチをスリップ制御すると共に、走行モード中に車両停止状態と判定されたときは、指令油圧を初期指令油圧から低下させて、補正後指令油圧を設定する車両停止時伝達トルク容量補正手段と、実トルク変化量に基づいて勾配切換油圧を設定する勾配切換油圧設定手段と、補正後指令油圧を設定する前に、解放判定時指令油圧から所定のトルク発生前半勾配で勾配切換油圧まで指令油圧を上昇させ、勾配切換油圧に到達した後はトルク発生前半勾配よりも小さなトルク発生後半勾配で指令油圧を上昇させる指令油圧上昇手段と、を備えた。
(もっと読む)
ハイブリッド自動車
【課題】発電機用インバータのスイッチングに伴うノイズの変化により運転者に違和感を与えるのを抑制する。
【解決手段】第1モータは車速Vに同期せずに回転する構成であり、車速変化量ΔVと回転数変化量ΔNm1との積が値0より大きいときには(S150)、第1モータの回転数Nm1に同期して変更されるキャリア周波数を用いたPWM制御方式でインバータをスイッチングする同期キャリアPWM制御方式によって第1モータが駆動されるようインバータを制御する(S170)。また、車速変化量ΔVと回転数変化量ΔNm1との積が値0以下のときには、予め固定されたキャリア周波数を用いたPWM制御方式でインバータをスイッチングする固定キャリアPWM制御方式によって第1モータが駆動されるようインバータを制御する(S160)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンの動作点の移動及び機械式変速機構の変速制御を同時に行う過程で、燃費の悪化を抑制しつつ好適な変速を実現する。
【解決手段】エンジン動作点の移動及び自動変速機18の変速制御を同時に行う過程で、3つの回転要素CA0,S0,R0のうちの1つの回転速度が他の回転速度と変化方向が異なる場合には、動力伝達装置11における入力パワー(例えばエンジンパワー)よりも自動変速機18における駆動伝達パワーが大きくされるので、3つの回転要素CA0,S0,R0の回転速度の回転方向に拘わらず変速中のパワー収支を安定させることができる。よって、エンジン動作点の移動及び自動変速機18の変速制御を同時に行う過程で、燃費の悪化を抑制しつつ好適な変速を実現することができる。
(もっと読む)
車両および車両用制御方法
【課題】複数の蓄電装置の各々を保護しつつ、複数の蓄電装置の各々の充放電性能を十分に発揮する。
【解決手段】ECUは、第1バッテリの使用電力WB_aが放電側制限値Wout_a以上であって(S100にてYES)、かつ、指令パワーPcと第1バッテリおよび第2バッテリにおいて許容される入出力電力の上限値Woutfとが乖離している場合(S102にてYES)、Winf側補正量をクリアするステップ(S104)と、Woutf上乗せ処理を実行するステップ(S106)と、第1バッテリの電力WB_aがWout_aよりも小さい場合(S100にてNO)、あるいは、指令パワーPcと上限値Woutfとが乖離していない場合(S102にてNO)、通常Woutf決定処理を実行するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 コースト走行時に安定した減速を達成可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータジェネレータとからなる動力源と、動力源と駆動輪との間に介装され、複数の変速段を達成すると共に、1速をワンウェイクラッチの係合により達成する自動変速機と、自動変速機を変速する変速手段と、コースト走行中の減速の時は、動力源により負トルクである目標コーストトルクを発生させ、変速手段により1速へのダウンシフトが終了する前に、目標コーストトルクを0または正トルクとするコーストトルク制御手段と、を備えた。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
車両用駆動装置の制御装置
【課題】駆動系の耐久性低下に影響を与えないねじり共振を抑制するため駆動力源の出力トルクが低下させられて車両の加速性が低下することを回避することができる車両用駆動装置の制御装置を提供する。
【解決手段】駆動系ねじり共振が発生していると判定された場合には、共振トルクTreを推定し、共振トルクTreのピーク値の増加割合RTを算出し、予め記憶された関係から、その増加割合RTに基づいて、エンジンの出力トルクTeを低下させるか否かを判定するためのトルク低下制御実施判定閾値Tre1(1)を決定し、共振トルクTreがトルク低下制御実施判定閾値Tre1(1)を超える場合には、エンジンの出力トルクTeを低下させることにより駆動系ねじり共振を抑制する。
(もっと読む)
ハイブリッド車両のエンジン停止制御装置
【課題】非走行レンジ選択中に第1クラッチ締結状態でイグニッションスイッチをOFFした時のモータの負トルクが車両の音振性能を悪化させないエンジン停止を実現する。
【解決手段】非走行レンジ選択中に(S15)、第1クラッチ締結状態のまま(S13)、イグニッションスイッチOFFにより(S11)、暖機後アイドル回転数Neidを超えた高回転(S17)でエンジンを停止させる場合、S19でエンジン回転数Neをアイドル回転数Neidへと低下させた後にエンジンを停止させるが、この際、モータの目標回転数tNmを所定の変化割合ΔNmで低下させ、モータ回転数Nmがこの目標tNmに追従するよう目標モータトルクtTmを定めてモータの制御をする。これにより、エンジン回転低下時における目標モータトルクtTmの変化量が、目標モータトルクtTmを音振許容トルク範囲内の値よりも大きくすることのない程度に抑制される。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電気システム内部での過電圧等の電圧異常の発生を防止することによって走行距離を確保することである。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、MG1およびMG2のトルク上下限範囲に基づいて、MG1およびMG2の出力トルクによって発生できる電力線54の電力変化量の上下限範囲を設定するとともに、電力線54の電圧VHを電圧指令値に近付けるために必要な前記電力変化量の指令値を算出する。HVECU70は、さらに、指令値と上下限範囲との比較に基づいて、MG1およびMG2の出力トルクによる電力制御の可否を判定する。
(もっと読む)
制御装置、ハイブリッド自動車および制御方法、並びにプログラム
【課題】エンジン走行中の電動機のフリクションの影響を、SOCを悪化させることなく解消させること。
【解決手段】エンジン10による走行中に、予め設定されているエンジン10の回転速度に応じた電動機13のフリクショントルクを、要求トルクに加算したトルクでエンジン10を動作させると共に、電動機13がフリクショントルクに相応するトルクを発生するように制御するハイブリッドECU18を構成する。
(もっと読む)
車両用制動装置
【課題】ビルドアップ制御を行う車両制動装置において、ビルドアップによる制動力を適切に設定する。
【解決手段】モータ駆動シリンダ8と、ペダルストロークセンサ11aと、ディスクブレーキ3と、制御ユニット6とを有するブレーキ装置であって、ブレーキ液圧を検出する液圧センサ16を有し、制御ユニットが、ブレーキペダル操作量の変化量に応じて、通常マップと、ビルドアップマップとのいずれかを選択し、ブレーキペダル操作量に基づいて選択したマップを参照し、ブレーキ液圧規範値を設定するブレーキ液圧規範値設定部23と、ブレーキ液圧規範値とブレーキ液圧との差に基づいてブレーキ液圧規範値を補正する補正値設定部25および加算器26と、補正されたブレーキ液圧規範値に応じて目標値を設定するストローク目標値設定部28とを有する。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車について、クラッチ操作部材の操作が関連する場合において電動機トルクを積極的に調整して駆動輪に伝達される駆動力を演出すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。通常、モータのトルク(MGトルク)は、アクセル開度に基づいて決定されるMGトルク基準値と、クラッチ戻しストロークに基づいて決定されるMGトルク制限値とのうち小さい方の値(=MGトルク最終基準値)に調整される。運転者によるクラッチペダル操作に関連する所定条件の成立に基づいて、MGトルクが、MGトルク最終基準値に代えてMGトルク最終基準値から変移した値に敢えて調整される。これにより、より適切、又はより一層運転者の意図に沿った駆動力を得ることができる。
(もっと読む)
1 - 20 / 1,082
[ Back to top ]