
Fターム[5H115TO21]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | アクセル操作量 (2,927)
Fターム[5H115TO21]の下位に属するFターム
アクセル操作の変化量 (487)
Fターム[5H115TO21]に分類される特許
1 - 20 / 2,440
電動機装置および電気自動車
【課題】電動機をより適正に制御する。
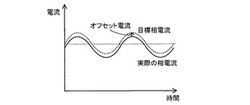
【解決手段】同期数Nsが変更されてから時間t1の間は前回Ios*から設定した仮オフセット電流Iostmpに向かって変化量kの範囲内で変化するようようオフセット電流Iosを設定し(S100,S130,S140)、時間t1から時間t2の間は同期数Nsを用いてオフセット電流Iosを設定し(S100,S110,S150)、オフセット電流Iosを制御用目標電流に加えたものを目標相電流に設定し、d軸,q軸に流れる電流が目標相電流となるようにするためのフィードバック制御によりd軸,q軸に印加すべき目標電圧を設定し、設定した目標電圧を2相−3相変換して目標相電圧を設定し、設定された目標相電圧が各相に印加されるようインバータをスイッチング制御する。こうした制御により、モータをより適正に制御することができる。
(もっと読む)
四輪駆動車の駆動力配分装置

【課題】コスト低減、電力損失の低減を図ることが可能であり、イグニッションOFF状態でもカップリング装置を制御する制御装置を作動させることが可能な四輪駆動車の駆動力配分装置を提供する。
【解決手段】駆動源からの駆動力が直接伝達される前輪14,14と、駆動源からの駆動力が電子制御カップリング30を介して伝達される後輪19,19とを備え、電子制御カップリング30の係合状態を変化させることで、前輪14,14と後輪19,19の駆動力配分を変更するように構成された四輪駆動車の駆動力配分装置100において、電子制御カップリング30には、発電機80およびキャパシタ90が備えられている。
(もっと読む)
車両の姿勢制御装置
【課題】走行面の凹凸、横風、急旋回動作等によって生じるロール振動を抑制することができる技術を提供する。
【解決手段】 この車両10は、車体20の左右に回転可能に取付けられている2つの駆動輪12a,12bを異なる駆動トルクで駆動可能となっている。この車両は、車体20のロール振動を抑制する姿勢制御装置32を備えている。姿勢制御装置32は、車体20のロール角を検出するロール角検出手段30と、ロール角検出手段で検出されるロール角の微分値に基づいて、左右の駆動輪に駆動トルク差が生じるように各駆動輪を駆動する制御部を有している。
(もっと読む)
電気自動車
【課題】 モータコイルの短絡異常を早期に検知し、車両走行上の問題を回避し得る電気自動車を提供する。
【解決手段】 電気自動車において、車輪2を駆動するモータ6は、3相の各モータコイルの一端が中性点で接続されるスター結線により結線された同期モータであり、モータコイルの短絡異常を検出する短絡異常監視手段95と、この短絡異常監視手段95で短絡異常が検出されると、前記中性点P1から各モータコイルを電気的に切断する異常時切断手段Esを設けた。
(もっと読む)
電気自動車
【課題】 モータが制御系のノイズ等で誤動作した場合に、瞬時にこれを判断して安全処置を採ることができる電気自動車を提供する。
【解決手段】 ECU21の出力するトルク指令と、モータ6またはこのモータ6で駆動される車輪2,3の回転信号、回転方向信号、およびモータ電流のいずれかとを常時監視し、この監視した情報を基に、定められた規則に従ってモータ6の誤動作を検出する誤動作検出手段37を設ける。この誤動作検出手段37で誤動作が検出されると前記モータ6への駆動電流の停止、および機械式ブレーキ9,10による制動のいずれかまたは両方を行わせる誤動作対応制御手段38を設ける。
(もっと読む)
電気自動車
【課題】 電気制御式の操舵機構の異常や、左右の駆動輪のモータ駆動系の異常に対し、操舵機構と左右個別のモータとによる旋回走行の相互補完機能を利用し、上記異常の発生時に、ドライバーの意図した方向に進めるように制御できる電気自動車を提供する。
【解決手段】 左右の駆動輪2,2を駆動する独立したモータ6,6と、転舵機構11に機械的に連結されていないステアリングホイール14により操舵する操舵機構12を備える電気自動車に適用する。異常時補完手段37として、操舵系の異常の検出によって、その異常による転舵不足を補うように、左右駆動輪2,2のトルク指令の配分を変更する異常対応トルク配分変更部39を設ける。また、車輪駆動系の異常検出によって、その異常による左右両駆動輪2,2の駆動バランスの変化量を補うように、操舵機構12の転舵用モータ13の回転量を変更する異常対応転舵量変更部38を設ける。
(もっと読む)
電気自動車
【課題】 モータがトルク制御不能となった場合に、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、ECU21と、インバータ装置22とを備えている。インバータ装置22におけるモータコントロール部29に回転数制御する回転数制御手段37を設け、前記モータコントロール部29によるトルク制御の異常を検出するトルク制御異常検出手段38と、この手段38によりトルク制御の異常の判定出力に応答して前記モータコントロール部29を前記回転数制御手段37による回転数制御に切り替える制御方式切替手段39とを設けた。
(もっと読む)
電気自動車
【課題】 車両の運転を急激に妨げることなく、モータを温度管理し、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、このモータ6を制御する制御装置とを備えている。前記モータ6のモータコイルに、このモータコイルの温度Tcを検出する温度センサSaを設け、この温度センサSaで検出される温度Tcが閾値を超えたとき、この温度Tcを時間tで微分したdTc/dtが0以下になるまでモータ6の電流値を低減するモータ電流低減手段95を設けた。
(もっと読む)
電気自動車
【課題】 モータの永久磁石における減磁等の性能劣化が生じた場合に、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、異常対応モータ駆動制御手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、推定された磁力が設定許容範囲内であるか否かを判定する。異常対応モータ駆動制御手段40は、判定手段39による異常であるとの判定結果に応じて、インバータ装置22によるモータ駆動に制限を与える。
(もっと読む)
電気自動車
【課題】 車輪用軸受、モータ、減速機等の異常に対して、適切な車両の駆動が行えて、車輪用軸受、モータ、減速機等の信頼性確保が行える電気自動車を提供する。
【解決手段】 ECU21およびインバータ装置22を備えた電気自動車において、トルク変動量推定手段37をインバータ装置22に設ける。トルク変動量推定手段37は、車輪回転数を検出する回転センサ24もしくはモータ6の角度センサ36から得られる回転数の変動量、荷重センサ41が検出する路面・タイヤ間の車両進行方向の荷重の変動量、またはモータ電流の変動量から、車輪用軸受4、モータ6、または減速機7に起因するトルク変動を含むトルク変動量を、定められた規則により推定する。
(もっと読む)
電気自動車
【課題】 車両の運転を急激に妨げることなく、インバータの過熱による特性変化および損傷を防止し、モータ駆動の制御特性の変化や、モータ駆動の不能を防止することができ、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、ECU21と、直流電力をモータ6の駆動に用いる交流電力に変換するインバータ31を含むパワー回路部28およびECU21の制御に従って少なくともパワー回路部28を制御するモータコントロール部29を有するインバータ装置22とを備えている。インバータ31に、このインバータ31の温度Tcを検出する温度センサSaを設け、温度センサSaで検出される温度Tcが閾値を超えたとき、温度Tcを時間tで微分したdTc/dtが0以下になるまでインバータ31に与える電流指令に制限を加えるインバータ制限手段95を設けた。
(もっと読む)
電気自動車
【課題】ドライバビリティの悪化を抑制する。
【解決手段】モータの指令トルクTm*は、上限トルクTmaxと指令トルクTm*との差が所定差dTthを超えているときには要求トルクTr*に向けて大きなレートで比較的迅速に増加し、差が所定差dTth以内となったときには要求トルクTr*に向けて小さいレートで緩やかに変化するよう設定される。このように指令トルクTm*を設定することにより、モータからのトルクが上限トルクTmaxで制限されるのが抑制されるから、ドライバビリティの悪化を抑制することができる。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】要求制動トルクをモータジェネレータによる制動トルクおよび機械式ブレーキによる制動トルクの両方で分担する場合に、エンジンを始動する際の駆動力変動をモータジェネレータによって適切に抑制できるようにする。
【解決手段】エンジン12を始動する際に、予め駆動系制動トルクの分担量上限値が制限され、それに伴ってモータジェネレータMGによる制動トルクの分担が低減される一方、その制動トルクの低下を補完するように油圧ブレーキ62による制動トルクの分担が大きくされる。このため、制動トルク制御とエンジン12の始動制御とが重なった場合でも、要求制動トルクに応じた制動トルクを発生させつつモータジェネレータMGによる制動トルクに余裕を残すことができ、そのモータジェネレータMGによる制動トルクの制御でエンジン12の初爆トルクを適切に吸収して駆動力変動を抑制することができる。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車について、後進−前進切り換え時において、車両のショックの発生の抑制、並びに車速の応答性の向上を達成すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。通常、モータのトルク(MGトルク)は、アクセル開度に基づいて決定されるMGトルク基準値と、クラッチ戻しストロークに基づいて決定されるMGトルク制限値とのうち小さい方(=MGトルク最終基準値)に調整される。シフト位置が「リバース」であり且つMGトルク最終基準値の減少勾配が所定値を超えたとき、MGトルクの減少勾配が前記所定値に制限される。シフト位置が「1速」であり且つクラッチが完全分断状態にあり且つアクセルペダルの操作が開始されたとき、MGトルクがMGトルク最終基準値より大きくされる。
(もっと読む)
電気自動車の駆動制御装置
【課題】運転者の判断による操作を行うことなく、降雨による濡れ等の路面状況に応じた安定した走行が行える電気自動車の駆動制御装置を提供する。
【解決手段】アクセル開度に応じたモータ指令トルクTrを出力するトルク指令手段23と、インバータ装置22とを有する電気自動車の駆動制御装置に適用する。車両の走行中の路面の状況を検出する路面状況センサまたは降雨を検出するレインセンサ32を設ける。前記トルク指令手段23に、アクセル開度とモータ指令トルクTrとの関係を示すアクセル特性曲線a〜dを複数設定したアクセル特性曲線設定部28を設ける。また、路面状況センサ等の検出信号に応じて、アクセル特性曲線a〜dを切り換えるアクセル特性切換部29を設ける。
(もっと読む)
電気自動車
【課題】要求駆動力で走行しながら昇降圧コンバータの共振を抑制する。
【解決手段】昇圧異常が生じたときには、車速が値0以上車速A未満の範囲ではLoギヤに設定し、車速が車速A以上車速B未満の範囲ではHiギヤに設定し、車速が車速B以上車速C未満の範囲ではLoギヤに設定し、車速が車速以上ではHiギヤに設定する昇圧異常時変速関係と車速とに基づいて目標変速段を設定し、モータを駆動するインバータを選択した制御モードで制御すると共に変速段が目標変速段になるよう変速機を制御する。これにより、走行に要求トルクで走行しながらモータの回転数が共振帯域に入るのを抑制することができ、昇降圧コンバータの共振を抑制することができる。
(もっと読む)
手動変速機
【課題】HV−MT車用の手動変速機であってコンパクトなものを提供すること。
【解決手段】 この変速機は、内燃機関から動力が入力される入力軸Aiと、電動機から動力が入力される出力軸Aoとを備える。この変速機は、動力伝達系統がAi−Ao間で確立されない(ニュートラルとは異なる)EV走行用の変速段(EV)と、動力伝達系統がAi−Ao間で確立されるHV走行用の複数の変速段(2速〜5速)とを有する。変速段の選択・確立を行うための複数のスリーブS1〜S3のうちの1つ(特定スリーブS1)が、「EV」と「2速」の確立のために割り当てられる。シフトレバーSLをN位置から「2速のシフト完了位置」に移動する場合、特定スリーブS1が「中立位置」から「2速位置」に移動して「2速」が確立される。一方、シフトレバーSLをN位置から「EVのシフト完了位置」に移動する場合、特定スリーブS1が「中立位置」から移動しない。
(もっと読む)
ハイブリッド自動車およびその制御方法
【課題】二次電池の連続放電に起因した劣化を抑制しながら、車両に要求される駆動力をより適正に確保する。
【解決手段】本発明のハイブリッド自動車20では、バッテリ50の放電が継続されるほど許容放電電力としての出力制限Woutが放電電力として小さく制限されるように当該出力制限Woutが補正される。そして、出力制限Woutの制限が開始されると、その後に少なくともバッテリ50の放電が停止されるように充放電要求パワーPb*が補正される(ステップS130およびS140)。
(もっと読む)
回生制動制御装置
【課題】回生式制動装置を備える車両において回生効率を向上させる。
【解決手段】回生制動制御装置24は、車両の前輪に回生制動力を伝達可能な第1回生制動手段56f、及び車両の後輪に回生制動力を伝達可能な第2回生制動手段56rの各々を制御する回生制動制御装置であって、第1回生制動手段及び第2回生制動手段の各々に要求される回生制動力の合計値である要求回生制動力を算出する要求回生制動力算出手段と、要求回生制動力を、第1回生制動手段及び第2回生制動手段で配分して実現する場合のエネルギ損失が、最も小さくなる配分比を算出する配分比算出手段と、算出された配分比で要求回生制動力を実現するように、第1回生制動手段及び第2回生制動手段を夫々制御する制御手段とを備える。
(もっと読む)
車両用駆動システム
【課題】少ない電力損失で、複数ある蓄電装置のそれぞれに入出する電力を、各蓄電装置の状態に応じて制御する。
【解決手段】駆動源としてモータ2を備えた電動車両用の駆動システム1は、モータ2を駆動させるインバータ6a,6bと、インバータ6a,6bに接続された蓄電装置7a,7bと、をそれぞれ有する複数の電源回路3a,3bを有している。これら複数の電源回路3a,3bの内、各電源回路3a,3bに設けられたインバータ6a,6bを制御する制御装置5は、電源回路3a,3bのそれぞれに入出する電力の配分を、各電源回路3a,3bの蓄電装置7a,7bの状態に基づいて調整する。
(もっと読む)
1 - 20 / 2,440
[ Back to top ]