
Fターム[5H180AA01]の内容
Fターム[5H180AA01]の下位に属するFターム
大形車両 (44)
中・小型、普通車 (33)
二・三輪車、オートバイ、車椅子 (177)
バス (168)
トラック、ミキサ車等の作業車両 (146)
緊急車両(パトカー、消防車等) (52)
危険物運搬用車両 (3)
タクシー、ハイヤ、送迎車 (205)
巡回車、集・配送車 (114)
時刻表により運行される車両、路線バス (140)
レース(競技)用の車両 (3)
その他の車両 (41)
Fターム[5H180AA01]に分類される特許
221 - 240 / 12,590
走行支援装置
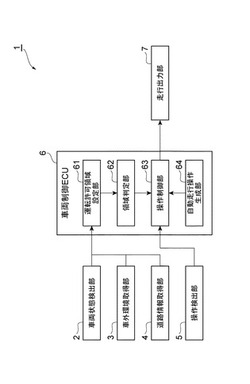
【課題】自動走行モードから、ドライバの運転操作に基づいて走行を行う手動走行モードへの切換を適切に行うことが可能な走行支援装置を提供する。
【解決手段】走行支援装置1は、自動走行モードから手動走行モードへの切り換えを許可することができる領域である運転許可領域Aを設定する運転許可領域設定部61を備えている。運転許可領域設定部61は、自車両11の進路候補R1〜Rnと自車両11周辺の障害物12との干渉が想定されない領域である安全領域Aを算出し、算出された安全領域Aに基づいて運転許可領域Aを設定する。
(もっと読む)
衝突予測装置

【課題】従来に比して衝突の誤判定を低減した衝突予測装置を提供する。
【解決手段】車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、車両の周囲に電磁波を送信し、物体から反射された当該電磁波の反射波を受信することによって当該物体を検出する物体検出手段と、物体検出手段によって検出された物体が車両に衝突する可能性のある障害物であるか否か判定する障害物判定手段と、物体が障害物であると判定された場合、車両と当該障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、車両の車体が上下方向に振動しているか否かを判定する振動判定手段と、車両の車体が上下方向に振動していると判定された場合、衝突判定手段による衝突の危険性が高いとする判定を車両の車体が上下方向に振動していないと判定された場合に比べて抑制する判定抑制手段とを備える、衝突予測装置である。
(もっと読む)
エコドライブ運転による燃費意識管理システム
【課題】エコドライブ運転における燃費意識を管理して燃費改善を図り、これにより環境負荷軽減の実現に寄与すること。
【解決手段】上記課題解決のため、運転操作内容から燃費改善に寄与した運転操作を解析し、その解析結果を運転記録カードに記録する一方、表示画面上にはその解析結果を表示することで、燃費改善意識を管理しかつ燃費を改善できる運転操作を学習可能としたシステムを提供する。
(もっと読む)
電気自動車における車内環境設定システム
【課題】電池充電無しで走行したり、あるいは電池充電後に走行するかを容易に判断することができ、電気自動車をより便利に運転することができるようになる
【解決手段】上記課題解決のため、本車内環境設定システムは、車内環境設定システム5と、この車内環境設定システム5からの設定情報を表示する表示器6とを含み、この車内環境設定システム5は、メモリカード9から読み込む運転者情報と電池残り容量とに基づいて走行可能距離と電池充電の必要度合いを演算すると共に、該演算にかかる走行可能距離と電池充電必要状態とを上記表示器6に表示するようにしたシステムである。
(もっと読む)
車載装置
【課題】公共交通機関の利用を促進することができる車載装置を提供する。
【解決手段】車両に搭載される車載装置20であって、出発地点から目的地点までの車両を利用した経路をユーザに案内する車両経路案内部と、出発地点から目的地点までの公共交通機関を利用した経路を探索する公共交通機関経路探索部208と、公共交通機関経路探索部208によって探索された経路が、予め定められた条件を満たすか否かを判定する条件判定部207と、条件判定部が、公共交通機関経路探索部208によって探索された経路が予め定められた条件を満たすと判定した場合に、公共交通機関経路探索部208によって探索された経路をユーザに案内する公共交通機関経路案内部206とを備える。
(もっと読む)
車両制御装置
【課題】衝突安全制御による車両の動作を体験できる車両制御装置を提供すること。
【解決手段】車両制御装置20は、自車両と障害物との間の距離および相対速度に基づいて自車両が障害物と衝突する可能性があるか否かを判断し、衝突の可能性がある場合には自車両の走行速度を減速させる衝突安全制御を行う車両制御装置20であって、衝突を回避できるか否かを判断し、衝突回避不可と判断した場合に衝突安全制御を行う通常走行処理手段251と、予め設定された体験走行実行条件を満たすか否かを判断し、体験走行実行条件を満たす場合には、通常走行処理手段251に代えて、衝突安全制御を行う体験走行処理手段252を有する。
(もっと読む)
仮想白線設定方法、仮想白線設定装置及びそれを用いた針路変更支援装置
【課題】車両の乗員に不快感や不安を与えないようにする仮想白線設定技術を提供する。
【解決手段】前方カメラ10により、自車両の走行車線の白線及び走行車線上の自車両の走行を妨げる対象物を検出し、対象物が検出されたときに、車載レーダ30で検出した対象物と自車両との間の距離及び対象物の速度及び速度計40で検出した自車両の速度に基づき、下記式1及び式2で示す式にしたがって仮想白線を設定する。仮想白線位置=検出した白線位置+仮想白線曲げ量・・・式1、対象物の白線からのはみ出し距離をXr、回避マージンをXm、衝突時間をttc、仮想白線曲げ開始時間をttcstart、仮想白線曲げ終了時間をttcend、自車両位置より先の仮想白線を演算するための係数をαとした場合、前記式1における仮想白線曲げ量は、
とする。
(もっと読む)
運転アシストシステム
【課題】より広範な視点からの予測に基づいて、衝突回避などのための的確な運転アシスト動作を行う。
【解決手段】車両に搭載され車両の運転をアシストする運転アシスト装置700を複数含む運転アシストシステムであって、自車両周辺に存在する他車両の画像データを取得するステレオカメラユニット420と、他車両の運転アシスト装置700のID情報を取得するID情報取得手段と、前記ステレオカメラユニット420によって取得された画像データに基づいて、他車両が衝突する可能性を算出する衝突可能性算出手段と、前記衝突可能性算出手段によって算出された衝突可能性が所定値以上である車両が搭載する運転アシスト装置700のID情報を抽出するID抽出手段と、前記ID抽出手段によって抽出されたID情報の運転アシスト装置700に対して、運転アシスト動作要求を行う。
(もっと読む)
交通情報システム、交通管理装置、リンク演算装置、交通情報推定のためのコンピュータプログラム、交通情報処理方法及び情報処理システム
【課題】道路リンクが多く存在していたり各道路リンクの特性が頻繁に変化したりしても、それぞれに応じた処理を実行可能とする。
【解決手段】他の道路リンクの交通情報及び推定用パラメータを用いて推定対象の道路リンクの交通情報を推定する推定システム11、及び、前記推定用パラメータを最適化する学習システム12を有するリンクエージェント1と、リンクエージェント1を管理する管理エージェント10とを備えている。管理エージェント10は、リンクエージェント1が実行する処理の候補となる複数の道路リンク処理を、道路リンクの特性と対応付けて記憶するノウハウ管理データベース22を有しており、道路リンクの特性が取得されると当該特性に基づいて前記データベース22から、当該特性が取得された道路リンクについて処理を実行するために用いられる道路リンク処理を選択する。
(もっと読む)
案内装置、案内方法、及び案内プログラム
【課題】センサの検出範囲外から自車両に接近する他車両が存在する可能性を考慮した案内を行うことができる、案内装置、案内方法、及び案内プログラムを提供すること。
【解決手段】案内装置50は、自車両に搭載される案内装置50であって、検出範囲内の他車両を検出する他車両検出部51と、他車両検出部51によって他車両が検出されない場合に、検出範囲外に存在し、且つ対象車線に存在する仮想車両の車速を推定する車速推定部52aと、自車両の車速と車速推定部52aが推定した仮想車両の車速とに基づき、対象車線に関する案内情報を出力する出力部52bとを備える。
(もっと読む)
車両周辺監視装置
【課題】レーダーとカメラの座標のマッチング不良により、物体の種別判別ができなくなることを抑制した車両周辺監視装置を提供する。
【解決手段】レーザーレーダー8により検出された物体と車両との相対位置に基づいて、撮像画像内に、該物体の実空間における位置及び大きさに対応した位置及びサイズの画像処理対象領域53bを設定する画像処理対象領域設定手段20と、画像処理対象領域53b内又は画像処理対象領域53bの周辺に存在する水平エッジを探索する水平エッジ探索手段21と、水平エッジ60線が探知されたときに、画像処理対象領域53bの位置を変更する画像処理領域変更手段22とを備える。
(もっと読む)
車両の報知装置
【課題】カーナビゲーションシステムを搭載していない車両であっても方向指示器の出し忘れを予防することができる車両の報知装置を提供する。
【解決手段】車両の方向指示器の作動を検出する作動検出手段11と、車両の速度を検出する車速検出手段12と、車両のステアリングの操舵角を検出する操舵角検出手段13と、少なくとも速度検出手段12及び操舵角検出手段13の検出結果に基づいて車両の走行状態を判別すると共にその判別結果と作動検出手段11による検出結果とに基づいて方向指示器が車両の走行状態に応じて適切に作動しているか否かの判定を行う適切作動判定手段21と、適切作動判定手段21によって方向指示器が車両の走行状態に適切に作動していないと判定された場合に、運転者に対して方向指示器の適切な作動を促す報知を行う報知手段22と、を備える構成とする。
(もっと読む)
情報提供システム
【課題】ナビゲーション装置を要することなく、後続車両運転者に対する経路案内を行うことが可能な情報提供システムを提供する。
【解決手段】本発明の情報提供システムは、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータを送信する送信手段と、前記送信手段から送信された案内ポイントデータを受信する第1受信手段と、前記第1受信手段によって受信された案内ポイントデータを記憶する記憶手段と、前記記憶手段に記憶される案内ポイントデータを再送信する再送信手段と、前記再送信手段から再送信された案内ポイントデータを受信する第2受信手段と、前第2記受信手段によって受信された案内ポイントデータを提示する提示手段と、からなることを特徴とする。
(もっと読む)
運転記録装置および地図作成システム
【課題】ヒヤリハット事例が発生した場合の対象や事象を解析するための情報を取得することが可能な運転記録装置およびヒヤリハット地図を作成する地図作成システムを提供する。
【解決手段】時系列の画像データから2次元オプティカルフローを算出する3次元計測部1と、2次元オプティカルフローに基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部2と、障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域に写し出されている物体とが衝突するか否かを判定し、衝突までの時間が、回避可能時間に比較して余裕がない場合にはトリガ信号を発する衝突可能性判定部3と、トリガ信号のタイミングで、画像データを記録する記録部4と、画像データが記録された時点での位置情報を記録部4に与える位置情報取得部5とを備えている。
(もっと読む)
車両用画像表示装置及び車両用画像表示方法
【課題】カメラ画像を用いて障害物の検出を行い、死角が発生する可能性が高いときのみ、カメラ画像に切り替えて表示する車両用画像表示装置を提供する。
【解決手段】車両周囲の映像を夫々撮影する複数のカメラを含む撮像部と、複数のカメラのうち車両の進行先の映像を撮影する少なくとも2つのカメラで撮影した画像を比較し、比較画像の一致度に応じて障害物の有無を判定する障害物判定部と、車両の情報及び車両の進行を案内するナビゲーション情報を生成する車両情報生成部と、障害物判定部による障害物の判定結果と、車両情報生成部から入手した車両の進行先の状況を示す情報をもとに、ナビゲーション画像又は進行先周辺の映像を撮影したカメラ画像を切り替えて出力する表示切替部と、表示切替部から出力された画像を表示可能な表示部と、を具備する。
(もっと読む)
車載器利用サービスの基盤システム
【課題】車載器に格納された固有情報に基づいて認証等の基盤処理を行うシステムに関し、車載器の不正使用を防止できる基盤システムを提供すること。
【解決手段】車両5が駐車場に進入すると、路側サーバ4は、DSRC通信部44で車載器6から受信した機器番号を変換部42で利用車番号に変換し、センターサーバ2に送信する。センターサーバ2は、認証部22でデータベース25の利用車番号格納部251を検索し、ユーザの利用車番号の存在を確認すると、検証成功の情報を路側サーバ4に送信する。ユーザが携帯電話7を通して即時停止の指令をウェブサーバ3に送信すると、ウェブサーバ3からの制御信号を受け、センターサーバ2の利用制御部21が、利用車番号格納部251のユーザの利用車番号に対応する利用制御フラグを「動作」から「停止」に書き換える。
(もっと読む)
車載撮像装置
【課題】撮像手段を車両に搭載した状態のまま、撮像手段の設定を簡単に且つ正確に確認、変更することができる車載撮像装置を提供することを目的とする。
【解決手段】車両に搭載される撮像手段2と、撮像手段2の出力画像信号の処理を行う処理手段15と、車両の機器制御装置からデータ伝送路を介して車両本体の情報を受信する通信手段10とを有し、処理手段15は、撮像手2段の現在の設定が、通信手段10で受信した車両本体の情報に対応しているか否かを判断する車載撮像装置を提供する。
(もっと読む)
運転支援装置
【課題】自車両の前方を走行する車両の挙動に応じて車間距離を自動的に延長できる機能性を向上させた運転支援装置を提供すること。
【解決手段】自車両が交差点に近づくと、交差点位置判断部11は先行車両の速度と加速度とをレーダ装置1により検出する。さらに先行車両と先先行車両との間の車間距離に応じた補正係数を読み出す。また交差点から自車両までの距離を算出し、先行車両の速度、交差点から自車両までの距離、先行車両の加速度をもとに延長車間距離特性データを参照し、自車両が交差点に接近したときの延長車間距離を読み出し補正係数により補正する。この結果、補正された延長車間距離は先行車両の加速度、先行車両と先先行車両との間の車間距離、交差点からの距離などの先行車両、先先行車両の挙動に応じて延長されたものとなる。
(もっと読む)
駐車支援装置
【課題】駐車支援装置において、撮像された自車両の後方画像から駐車枠の白線と白線端点とを検出して画像表示の切換タイミングの精度を向上する。
【解決手段】制御手段9は、撮像された自車両の後方画像の歪みを補正して歪み補正画像にする歪み補正手段9Aと、撮像された自車両の後方画像を俯瞰画像に変換する画像変換手段9Bと、変換された俯瞰画像から駐車枠2の白線を検出する白線検出手段9Cと、検出された白線の白線端点を検出する白線端点検出手段9Dと、検出された白線端点と自車両との距離に基づいて表示手段8に表示する画像を歪み補正画像と俯瞰画像とのいずれかに切り換える表示切換制御手段9Eとを備える。
(もっと読む)
車両の自動ブレーキ制御装置
【課題】本発明は、交差点内或いは交差点付近において誤作動を低減することのできる車両の自動ブレーキ制御装置を提供する。
【解決手段】ミリ波レーダで検出された障害物の位置情報及びGPSで検出された自車の位置情報から障害物位置判定部にて障害物の位置が交差点内或いは交差点付近であるか否かを判定し(S16〜S22)、判定結果をブレーキ制御部へ供給し、ブレーキ制御部では、障害物が静止物である場合には静止物用ブレーキ制御、障害物が移動物で且つ自車或いは障害物の位置が交差点内或いは交差点付近である場合には静止物用ブレーキ制御を行い(S26)、障害物が移動物で且つ自車或いは障害物の位置が前述以外の場合には移動物用ブレーキ制御を行い(S28)、警告灯、スピーカ及びブレーキ装置の作動タイミングを制御する。
(もっと読む)
221 - 240 / 12,590
[ Back to top ]