
Fターム[5H180AA02]の内容
Fターム[5H180AA02]に分類される特許
1 - 20 / 44
カーナビゲーションシステム
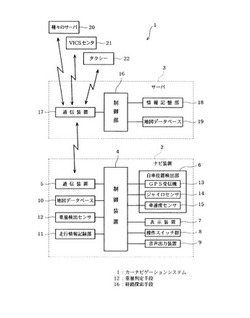
【課題】省燃費の観点から十分に効果的な経路を探索する。
【解決手段】ナビゲーション装置2は、車両の現在地及び目的地、並びに車体重量のデータを、サーバ3(通信装置17)に対し送信する。サーバ3の制御部6は、ダイクストラ法を用いて、出発地から目的地までのコストが最小となる省燃費を図り得る経路を探索する。このとき、信号頻度が大きい、急カーブの数が多いといった車両が加速(発進)、減速(停止)を行う度合が大きくなる特定道路は、それ以外の普通道路(基準値)に比べてコストが大きく、且つ、車体重量が大きいほどコストが大きくなるよう変更される。
(もっと読む)
信号制御装置及びジレンマ感応制御方法

【課題】 車両5ごとに正確なジレンマ判定を実行して、隣接交差点との系統制御に及ぶ悪影響を低減する。
【解決手段】 本発明は、交差点Jへの流入道路を走行する車両5が、現サイクルの黄信号開始時において危険ゾーンの走行区間Z1,Z2に存在する場合に、流入道路に通行権を与えている現サイクルの青信号を継続し、存在しない場合に、当該青信号を打ち切るジレンマ感応制御を行う信号制御装置2である。この装置2は、車両5の速度及び位置を取得し、車両5に対応する危険ゾーンを当該車両5ごとに設定し、取得された車両5の速度及び位置と設定された危険ゾーンとに基づいて、車両5がこれに対応する危険ゾーンの走行区間Z1,Z2に存在するか否かを判定する。
(もっと読む)
車両検出装置及び通行料課金システム
【課題】車両検出装置の製造・設置・保守管理にかかる費用を抑える。
【解決手段】センサ装置110a及びセンサ装置110bは、所定の放射基点から所定の放射方向へ向けて放射光を放射し、放射した放射光が反射物体に反射した反射光を受光することにより、放射光を反射した反射物体までの距離を算出する。センサ装置110aの放射基点は、通行路801を横断する通行路横断方向において、通行路801から離れた位置にある。センサ装置110bの放射基点は、通行路801を横断する通行路横断方向において、センサ装置110aの放射基点とは反対側に通行路801から離れた位置にあり、車両が進行する車両進行方向において、センサ装置110aの放射基点から離れた位置にある。
(もっと読む)
車両の衝突回避支援装置
【課題】車両の衝突回避支援装置に関し、最大高さが変化する車両の最高部位が障害物に衝突することを回避もしくは衝突速度を低減できるようにする。
【解決手段】最大高さが変化する車両に装備され、車両前方に位置する障害物Oとの衝突を回避するための衝突回避支援装置において、車両3の最大高さHを検知する最大高さ検知手段11と、車両前方で前記最大高さHと同一高さに位置する障害物Oを検知する障害物検知手段12と、前記最大高さH以下に障害物Oがあることを車両3のドライバに警報する警報手段13とを備えた。
(もっと読む)
無線装置
【課題】精度の高い位置情報を取得可能な無線装置を提供する。
【解決手段】車両CA1に搭載された無線装置10は、車両CA2に搭載された無線装置10と共通して受信できるGPS信号を送信するGSP衛星R1,R3〜R6から受信したGPS信号に基づいて、車両CA1とGSP衛星R1,R3〜R6との擬似距離P1を演算し、車両CA2とGSP衛星R1,R3〜R6との擬似距離P2を車両CA2に搭載された無線装置10から受信する。また、車両CA1に搭載された無線装置10は、擬似距離P1と擬似距離P2との差である擬似距離差を演算し、車両CA1と車両CA2との高度差を3次元電子地図を用いて検出する。そして、車両CA1に搭載された無線装置10は、擬似距離差と、高度差とに基づいて、車両CA1と車両CA2との相対位置を演算する。
(もっと読む)
大型車両用安全運転支援装置
【課題】被牽引車を牽引する牽引車が回頭する場合に、巻き込み事故の発生を防止する大型車両用安全運転支援装置を提供すること。
【解決手段】本発明の大型車両用安全運転支援装置は、車両の周囲の障害物30を検出する複数の障害物検出手段12C、12R、12L、14R、14L等と、検出された障害物30の位置情報等から危険度を判定する危険度判定手段と、危険度判定結果を運転者に報知する報知手段と、を備え、障害物検出手段12C等として、牽引車10の側面側に配置され、一定値以上の舵角で牽引車10が回頭した場合、回頭方向側において被牽引車10の側面側かつ被牽引車20の斜め後方の領域L2(L)に存在する障害物30の存在を検出する回頭時障害物検出手段14R、14Lを備える。
(もっと読む)
情報提示装置および情報提示方法
【課題】運転者の運転負荷に応じて、情報を運転者に適切に提示できる情報提示装置を提供する。
【解決手段】運転者の運転負荷を推定する推定手段と、複数の構成情報からなる提示情報を取得する取得手段と、推定した運転者の運転負荷に基づいて提示情報の提示態様を決定する提示態様決定手段と、提示情報を運転者に対して提示する提示手段500と、運転者の運転負荷に応じた優先度を設定する優先度設定手段と、を備える、提示態様決定手段は、推定した運転者の運転負荷が所定値以上の場合には、推定した運転負荷に応じた優先度に基づいて、運転者に提示する構成情報の量を少なく設定し、また、提示情報を提示している際に、推定した運転者の運転負荷が所定値未満に変化した場合、変化後の運転者の運転負荷に応じた優先度に基づいて、運転者に提示する構成情報の量を増加するように提示態様を変更する。
(もっと読む)
信号制御装置
【課題】交差点での信号待ち先頭車両が大型車両になるのを抑制することで、交差点における交通流率の低下を防止する信号制御装置を提供する。
【解決手段】信号制御装置1は、感知器11の出力である車両感知信号を用いて、流入リンクにおける車両の平均速度や、その車両が大型車両であるかどうかを判定する。また、信号制御装置1は、感知器11の感知位置を通過した大型車両が、交差点での信号待ち先頭車両になるかどうかを判定し、先頭車両になると判定した場合に、現サイクルの主現示を延長し、この大型車両を交差点で停止させずに通過させる。これにより、トラックやバス等の大型車両が、交差点での信号待ち停止車両の先頭になるのを抑制する。
(もっと読む)
車両検知装置、車両検知システム、車両検知装置の車両検知方法および車両検知プログラム
【課題】画像センサから見て他の車両に隠れている車両を検知できるようにすることを目的とする。
【解決手段】第1画像センサ110は交差点付近に道路の進行方向と逆向きに設置され、走行車両を正面から撮像する。第2画像センサ111は交差点付近の道路脇に道路に向けて設置され、走行車両を側方から撮像する。画像センサデータ処理部210は撮像された道路画像119を入力し、入力した道路画像119に基づいて車両情報211を生成する。座標地図部310は車両情報211に基づいて車両情報テーブル391を更新し、道路画像119に基づいて車両をプロットしたメッシュ地図データ392を更新する。追尾処理部320は車両情報211と旧車両情報テーブルとに基づいて検知漏れした車両と撮像範囲を通過した車両とを検出する。追尾処理部320は検知漏れ車両と通過車両とについて車両情報テーブル391とメッシュ地図データ392とを更新する。
(もっと読む)
車載用ナビゲーション装置
【課題】他車両や道路等を起因として運転者が走行中に受けるストレスを従来よりも低減して、快適な運転ができる車載用ナビゲーション装置を提供する。
【解決手段】本装置は、経路探索部31と、車両案内部32とを備える。更に、自車両が走行しているときに、所定の検知対象を検知するセンサ11,12,…と、センサ11,12,…によって検出したデータに基づいて、所定の検知対象に関する対象情報を取得する情報取得部33と、情報取得部33によって取得した対象情報と、自車両が走行している道路を特定する道路情報とを関連付けて蓄積する情報蓄積部34とを有し、経路探索部31は、情報蓄積部34によって蓄積された対象情報及び道路情報に基づいて運転者が受ける圧迫感に関する指標を求め、当該圧迫感に関する指標が低い経路を優先的に提示する。
(もっと読む)
保険料査定方法、保険料査定システム、情報処理装置、および端末
【課題】実際の事故発生率を反映した走行履歴による保険料査定を可能とする。
【解決手段】保険契約者車両の走行経路の履歴データを通信手段107を介して他端末より受信し、この履歴データが示す地図上の位置情報を事故情報蓄積テーブル126に照合して、前記保険契約者の車両が走行した経路中に含まれる事故発生地点のデータを事故現場通過情報として特定し、保険契約者に対応付けて記憶手段101に格納する通過現場特定手段110と、各保険契約者の事故現場通過情報を記憶手段101から読み出し、保険契約者毎の事故現場通過頻度をカウントし、事故現場通過頻度が所定基準値以下である保険契約者を特定し前記保険料テーブル128における該当保険契約者の保険料を所定値だけ低減する保険料低減手段111とを備えた情報処理装置100から保険料査定システム10を構成する。
(もっと読む)
地図表示装置
【課題】操作性を向上する。
【解決手段】地図データに基づいて地図表示画面上にジャンプ移動する移動先を示すジャンプボタンを表示させ(S110)、ジャンプボタンが選択操作されたことを判定すると、ジャンプボタンにより示される移動先へジャンプ移動するように地図表示領域を変更する(S114)。
(もっと読む)
駐車支援装置
【課題】より適切に運転者の駐車操作を支援することができる駐車支援装置を提供する。
【解決手段】駐車支援装置は、目標駐車位置と自車両が所定の相対位置関係にある一旦停止位置において当該目標駐車位置を認識する認識手段と、目標駐車位置に基づいて駐車運転時の操舵操作を支援する支援手段と、一旦停止位置に自車両を運転者が停止させるにあたって、目標駐車位置の特徴箇所と前記自車両との相対位置関係を三次元的に当該運転者が視認することを補助するための自車両の車両用ミラーに設けられた車幅方向外側に延びる部材により構成される駐車補助手段22とを備える。
(もっと読む)
車両周辺表示装置
【課題】指標線を認識しやすい周辺表示装置を提供する。
【解決手段】車両に設けられた撮影装置により撮影された車両の周辺画像を取得する画像取得部と、車室内に設けられ周辺画像を表示する表示装置と、運転者による運転操作の際に、運転者の指標となる指標線50aを、指標線50aの撮影装置に近い側に影部50cを付して周辺画像に重畳表示させる指標線出力部とを備えた。
(もっと読む)
運転誘導装置および運転誘導方法
【課題】道路走行において運転者の個人差を考慮した適切な操舵タイミングの報知を実現し得る運転誘導装置および運転誘導方法を提供する。
【解決手段】車両状態検出装置111、撮像装置112、顔向き検出装置113および頭部/車体ヨー時間差演算部114により、運転者の頭部挙動および車両挙動を検出して両者の時間差を演算し、ナビゲーション装置115によりコーナーの曲率、並びに該コーナーに対する車両位置を検出し、駆動タイミング演算部117により操舵を開始すべき理想操舵開始位置を算出し、運転者の頭部挙動および車両挙動の時間差、並びに理想操舵開始位置に応じて、運転者に操舵を開始するタイミングを触覚による乗車用シート118を介して報知する。
(もっと読む)
交通流計測装置及びプログラム
【課題】
混雑した道路でも大型車両と普通車両を問わず個別の車両の末尾を精度よく検出し、台数と速度を高い精度で計測する。
【解決手段】
路上に設置したカメラで道路を俯瞰した動画像を取得し、該取得画像を画像処理装置で車両の位置を検出する交通流計測装置において、車両の形状を直方体モデルであらわし車幅に相当した水平エッジを直方体モデルの末尾の辺と仮定したときに、直方体の背面上と屋根前の2辺に相当する水平エッジのペアが車両の車幅,車高,車長の分布と末尾の候補の幅に応じて設定した範囲から検出されることを条件に車両を検知することを特徴とする交通流計測装置およびプログラム。
(もっと読む)
橋梁通過車両監視システム、橋梁通過車両監視方法、およびコンピュータプログラム
【課題】1個のひずみ計でも、軸間距離、車速、車種、および軸重を特定できる、橋梁通過車両監視システムを提供する。
【解決手段】1測定位置ごとに1個のひずみ計104を配置する。また大型車両の軸間距離のデータを軸間距離データベース32に登録すると共に、1トンの基準軸重ひずみ波形33を記憶しておく。そして、ひずみ計104で計測したひずみ波形から車軸の通過タイミングを検出し、車両の軸間比率を算出する。そして、通過タイミングから算出した軸間比率と、軸間距離データベース32に登録された軸間距離から算出される軸間比率とを比較し、車両の軸間距離、車速および車種を特定する。また、車軸の通過タイミングに合わせて、基準軸重ひずみ波形を時間軸上に配置したひずみ波形を生成し、該基準軸重ひずみ波形と、実際に計測された車両一台分のひずみ波形とを比較し、各軸の軸重を算出する。
(もっと読む)
ドライブレコーダ
【課題】安価な構成で車両後方の状況を示す画像データも記録できるドライブレコーダを提供する。
【解決手段】各種状態表示システム用の、車両の後方を監視するために車両の後方を撮像する後方カメラ22と、後方カメラ22で撮像された画像データを表示するためのモニタ21とが接続され、後方カメラ22で撮像された画像データを分配する分配器20を備える。分配器20に、車両走行時の車両の前方を撮像する周囲撮像ユニット10、11と、撮像データ記録部12とを接続し、撮像データ記録部12によって、周囲撮像ユニット10、11で撮像された画像データおよび後方カメラ22で撮像された画像データを記録する。
(もっと読む)
コンテナ車両危険度検査装置
【課題】通路に設置されたカメラによりコンテナ車両を撮影した画像から、コンテナ車両が走行する際の危険度を検査する、コンテナ車両危険度検査装置を提供することである。
【解決手段】コンテナ挙動データ作成部32がコンテナ画像解析部31で解析されたデータであるコンテナの傾き角度の時系列データを作り、コンテナ挙動データとしてまとめ、コンテナ挙動データベース36が様々な状態のコンテナ挙動データを予め保管しており、コンテナ挙動照合部33がコンテナ挙動データ作成部32によりまとめられたコンテナ挙動データとコンテナ挙動データベース36に保管されているコンテナ挙動データとの照合を行い、どのコンテナ挙動データと類似しているかを調べ、走行危険度判断部34がコンテナ挙動照合部33よる照合結果からコンテナ車両の状態を推測し、そのコンテナ車両の走行時の危険度を判断する。
(もっと読む)
隊列走行システム
【課題】隊列の全体の消費エネルギーを小さくすることができるようにする。
【解決手段】自車情報を取得する自車情報取得処理手段と、周辺車両11についての周辺車両情報を取得する周辺車両情報取得処理手段と、自車情報及び周辺車両情報に基づいて、隊列走行に移行するかどうかを判断する隊列走行判定処理手段と、隊列走行に移行する場合に、自車情報及び周辺車両情報に基づいて、隊列の全体の消費エネルギーが小さくなるように隊列を編成する隊列編成処理手段と、編成された隊列で隊列走行を行う隊列走行処理手段と、隊列走行が開始された後に、隊列の全体の効率に基づいて隊列の編成を判定し、現在の編成を維持するべきかどうかを判断する編成判定処理手段とを有する。隊列の全体の効率に基づいて隊列の編成が判定されるので、隊列の全体の消費エネルギーを小さくすることができる。
(もっと読む)
1 - 20 / 44
[ Back to top ]