
Fターム[5H180AA20]の内容
Fターム[5H180AA20]に分類される特許
1 - 20 / 41
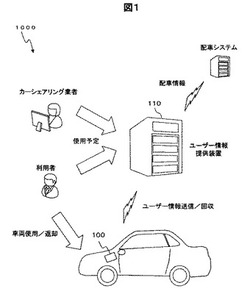
車載装置、ユーザー情報提供装置、車載装置システムおよび情報配信方法
【課題】 本発明の目的は、より簡便にユーザーのカスタマイズされたデータを利用可能とする技術を提供することにある。
【解決手段】
本発明の車載装置は、外部の装置と通信を行う通信手段と、設定情報を含む情報を所定の外部の装置から前記通信手段を介して取得する情報取得手段と、前記設定情報から自装置にて使用する設定情報を取得して適用する設定適用手段と、前記所定の外部の装置からの回収要求を前記通信手段を介して受け付けると、前記適用された設定情報を収集する設定収集手段と、前記設定収集手段により収集した前記設定情報を前記所定の外部の装置に前記通信手段を介して送信する設定情報送信手段と、を備えたことを特徴とする。
(もっと読む)
車両管理運用システム

【課題】 複数の車両の運用管理を行う場合に、各車両の燃費等に関する属性情報を把握すると共に、使用目的に応じて要求される総積載物重量及び走行距離等に関する使用条件に基づいて、所有する複数の車両の中から最適な車両を特定する。
【解決手段】 管理運用する複数の車両について、少なくとも、車両重量に基づく燃費換算データ(重量燃費)を含む属性情報と各車両の識別情報とを紐付けして構成した車両データベース24と、車両の使用予約を行う際に、少なくとも、予約車両に要求される総積載物重量及び走行距離に関する使用条件を取得する使用条件取得手段21と、車両データベース24を参照し、取得した使用条件に基づいて算出される燃費が最もよい車両を、予約車両として特定する予約車両特定手段22と、を備えることにより、管理運用する複数の車両について、各車両の属性に応じて適切な運行管理を行う。
(もっと読む)
事故防止監視制御システム
【課題】オペレータに危険距離に近いことを報知して回避させると共に、最悪の事態(接触事故)が発生した場合でも重大事故に拡大することを防止する事故防止監視制御システムを提供する。
【解決手段】この監視制御装置7は、GPS衛星5からの信号に基づいて得られたクレーン車8に係る位置情報を取得する位置情報取得手段11と、クレーン車8の所定範囲内に位置する送電線に係る情報を格納した送電線情報格納手段12と、クレーン車8に係る位置情報と送電線3に係る位置情報とを照合する照合手段13と、照合手段13による照合結果に基づいてクレーン車8と送電線3との離隔距離を判定する離隔距離判定手段14と、離隔距離判定手段14により判定された離隔距離が所定の安全距離よりも短い場合にクレーン車8に対して警報を発する警報発信手段15と、自動復旧装置の使用の可否を制御する自動復旧装置制御手段18と、を備えて構成されている。
(もっと読む)
複数移動体の行動範囲制限システム
【課題】複数の移動体のうち、あらかじめ設定された行動範囲を逸脱した移動体に対して、設定行動範囲内に帰還するように該子機を制限するシステムを提供する。
【解決手段】本発明による行動範囲制限システムは、乗員によって運転可能な、1つ以上の子機と、前記子機の位置を制御する特定機と、前記子機及び特定機の位置情報を供給する位置測定装置とからなる。特定機202Mは、位置測定装置206から特定機及び子機の現在位置情報を取得し、子機202Sの位置が特定機によってあらかじめ設定された制限領域302を逸脱しているか否かを判断し、逸脱している場合、特定機202Mは、子機202Sに対して、前記制限領域302内の目標帰還位置に移動するように指示情報を送信する。子機202Sは、前記指示情報を受信すると、位置情報に基づいて前記目標帰還位置に移動するように移動動作部5を制御する。
(もっと読む)
コンテナの施錠・解錠システム、その方法及びそのプログラム
【課題】解錠時にGPS衛星からの受信電波を要さず、人力で運搬でき、悪意ある他者からの制御を受けないこと。
【解決手段】セキュリティボックス11の施錠及び解錠を制御し、暗証番号が入力されて施錠された後は、操作パネル5をロックする電子ロック制御部3と、GPS衛星からGPS測位情報を受信するGPS部8と、測位情報から現在位置の情報であるGPS位置情報を生成するGPS制御部1と、GPS位置情報を前記管理用端末に無線通信で送信する通信カード7と、目的地の位置情報である登録位置情報を記憶するフラッシュメモリ6と、GPS位置情報と登録位置情報とを比較し、両者が合致する場合は、操作パネル5のロックを解除させる信号を電子ロック制御部3に送るプロセッサ2と、を備え、プロセッサ2は、GPS位置情報が示す位置と登録位置情報が示す位置との誤差が100m以内であれば、操作パネル5のロックを解除させる。
(もっと読む)
対人距離危険度警告装置
【課題】工事車両周囲に存在する作業員の位置安全を容易に認識できる装置を提供する。
【解決手段】信号を発信するための発信機と、信号を受信するための受信機との組み合わせよりなる装置において、受信機に受信信号処理部と警告発信部および警告表示部を設け、警告表示部において用いる表示パネルに、信号強度に応じて選択的に点灯する表示ランプを設けることにより、受信機と発信機の距離変化を認識できるよう構成したことを特徴とする。
(もっと読む)
車両管理システム
【課題】GPSを利用せずに車両の位置情報を一元的に管理する。
【解決手段】センタ装置Sの車両管理用データベースには、充電設備識別情報と車両識別情報、各充電設備へ電気自動車EVが入庫した時刻及び当該充電設備から電気自動車EVが出庫した時刻、並びに充電設備から電気自動車EVへの充電状況に関する情報が登録されている。すなわち、センタ装置Sが、車両管理用データベースに登録されている車両識別情報と充電設備識別情報との対応関係に基づいて電気自動車EVの位置(電気自動車EVが在る充電設備の場所)を管理することができる。その結果、従来例のようにGPSを利用せずに車両(電気自動車EV)の位置情報を一元的に管理することができる。
(もっと読む)
パークアンドライドシステム、当該システムを構成する自動車、および当該システムの制御方法
【課題】自動車から公共車両へのまたは自動車から公共車両への乗り換えをスムーズにすることが可能なパークアンドライドシステムを提供する。
【解決手段】パークアンドライドシステム1は、所望の目的地に行くために自動車から公共車両に乗り継いで移動するためのパークアンドライドシステムであって、当該パークアンドライドシステムの利用者により乗車される自動車20を含んで構成される。自動車20は、パークアンドライドシステムの利用者が公共車両の停留所にて自動車から降車した後に、停留所から駐車場まで自動車を自動的に移動させるパークアンドライド制御部25を備える。
(もっと読む)
情報制御装置、情報制御方法、情報制御プログラム、および記録媒体
【課題】利用者の車両に対する占有時間を必要最小限に抑えること。
【解決手段】情報制御装置100は、車両の貸し出しをおこなう貸車システムに用いられる。情報制御装置100は、格納部101と、設定部102と、検索部103と、出力部104とを備える。格納部101は、車両の貸し出しまたは返却をおこなう車両基地の位置情報を格納する。設定部102は、利用者からの入力に基づいて目的地を設定する。検索部103は、格納部101に格納されている車両基地の中から、設定部102に設定された目的地近傍の車両基地を検索する。出力部104は、検索部103によって検索された目的地近傍の車両基地の情報を出力する。
(もっと読む)
複数ロボットによる探索監視方法
【課題】イベント情報を活用して、脅威対象物をより効果的に探索することができる複数ロボットによる探索監視方法を得る。
【解決手段】複数のロボットにより脅威対象物を探索監視する複数ロボットによる探索監視方法において、脅威対象物によるイベント発生時に、前記脅威対象物の移動速度を仮定することにより時間とともに拡散する脅威対象物の存在可能性の範囲を算出するステップ(S3)と、脅威対象物の存在可能性の範囲を縮小すべくロボットが移動する目的地を設定するステップ(S4)とを備える。
(もっと読む)
可変構成自動車
【課題】
現在の一般的な乗用車は数人乗車可能で高速走行、長距離走行の能力を有しているが、実際の使い方はその保有能力の一部活用の走行移動が殆どである。例えば一人乗車での走行移動の場合には、他の四人乗車分に関連する車体部分の重量は引き摺って走行していることになり、余分の多くのエネルギーを消費している。
旅客輸送量データからも平均乗車人数が1.358人であり、殆どの走行時において一人が移動するのに、1トン前後の重量を引きずって移動していることになり、エネルギー効率が極めて悪い移動手段である。
【解決手段】
乗用車システムを原点に立ち返って見直し、最小限の乗用車両と走行移動能力付加車両を組み合わせて一体構成が可能な可変構成自動車であって、走行移動方法と乗車人数に応じて最適な必要最小限な車両構成とする。
(もっと読む)
環境認識装置
【課題】対象物を有効に検出して周囲の環境を認識することが可能な環境認識装置を提供する。
【解決手段】環境認識装置1は、一対のカメラ2a、2bで周囲の環境中の対象Vahを撮像して2枚一組の画像TO、TCを出力する撮像手段2と、異なる撮像方法で撮像され、または撮像された2枚一組の画像に対して異なる画像処理方法を施して形成される2枚一組の画像の複数の組に対してステレオマッチング処理を行って各組ごとに距離画像TZ1、TZ2を形成するステレオマッチング手段7a、7bと、各距離画像TZ1、TZ2をそれぞれ複数の区分Dnに分割して各区分Dnごとに代表視差dpn1、dpn2を算出し、対応する区分Dnの各代表視差dpn1、dpn2のうちいずれかの代表視差を選択して当該区分Dnの代表視差dpnとする選択手段11と、各区分Dnの代表視差dpnに基づいて画像TO中に撮像された対象を検出する検出手段12と、を備える。
(もっと読む)
車両警告システム
【課題】一般車両が路面軌道車両に対する危険を回避可能な車両警告システムの提供。
【解決手段】運転車両の車載装置1は、気象情報センタ19より周辺地域の積雪量データを受信する。また、車載装置1は路面車両情報センタ20から路面軌道車両24の位置データを受信する。車載装置1の制御装置2は位置検出器3によって検出された自車両の位置から、自車両の走行地域周辺において所定量以上の積雪が検出され、かつ自車両が路面軌道が敷設された道路を走行していることが検出された場合、運転者に対して路面軌道が敷設された道路を走行していることを警告し、さらに、軌道車両24が自車両に接近していることが検出された時に、運転者に対して軌道車両24の接近を警告する。
(もっと読む)
経路探索システム、経路探索方法、経路探索プログラム、及び自律移動体
【課題】探索空間が広く経路長が長くなる場合においても、少ない記憶容量で最適な経路探索を実行可能な経路探索システム、経路探索方法、経路探索プログラム、及び自律移動体を提供すること。
【解決手段】本発明にかかる経路探索システムは、移動領域内の移動始点から移動終点に到達する経路を探索する経路探索システムであって、移動領域を複数の領域に分割する領域分割部と、予め順序が決められた、評価値を表現する複数の符号からなる符号セットを用いて、領域分割部により分割された複数の領域のそれぞれの評価値を算出する評価値算出部と、評価値算出部により算出された評価値に基づいて経路を決定する経路決定部とを備え、評価値算出部は、複数の領域のそれぞれに対して、符号セットに含まれる各符号を、予め決められた規則に従って割り当てると共に、当該符号セットを繰り返して用いるものである。
(もっと読む)
車両用充電量制御装置
【課題】無線通信装置に電力を供給する二次電池の充電量を適切に制御することが可能な車両用充電量制御装置を提供すること。
【解決手段】無線通信装置に電力を供給する二次電池を充電する充電手段(30、32)と、自車両の進行先における電波状態を取得する電波状態取得手段(42B、46)と、電波状態取得手段により取得された電波状態が悪くなるのに応じて、二次電池の充電を促進するように充電手段を制御する制御手段(50)と、を備える車両用充電量制御装置(1)。
(もっと読む)
車番特定装置、車番特定システム、コンピュータプログラム及び車番特定方法
【課題】車両の通過地点及び通過時点に基づいて該車両の車番を特定することができる車番特定装置、車番特定システム、コンピュータプログラム及び車番特定方法を提供する。
【解決手段】センタ装置40は、対象車両の通過地点P及び通過時刻を取得し、収集した走行軌跡データに基づいて、対象車両が地点Pを通過した時刻に一致する時刻に地点Pを通過した車両の識別番号を選定する。センタ装置40は、選定した識別番号の走行軌跡に基づいて、所定の撮像地点A1に到達した到達時刻を特定し、特定した撮像時刻に撮像された撮像画像に基づいて、車番を特定する。
(もっと読む)
暗証番号制限解除システム及び駐輪管理システム
【課題】 利用者が暗証番号を失念した場合であっても、係員がわざわざ出向いて本人確認する必要がなく、利用者自身の操作で暗証番号を思い出させてその入力を可能にした暗証番号制限解除システムと、この解除システムを利用した駐輪管理システムを提供する。
【解決手段】 登録済み暗証番号21Yの検索操作が行われると、検索者が操作している駐輪料金精算装置20の画面に対して、登録済みの真正な暗証番号21Yと、複数の偽の暗証番号21Vから成る暗証番号検索候補データを表示させて、検査者がこのデータの中から真正な暗証番号21Yを選択した場合に限って、次の操作又はそれ以降の操作へ進むことを可能にする。
(もっと読む)
移動体管理装置、移動体監視システム、および燃料フィルタの異常検出方法
【課題】偽造燃料フィルタや粗悪燃料の使用を、移動体の動作環境によらずに精度よく検出することが可能な移動体管理装置、移動体監視システム、および燃料フィルタの異常検出方法を提供する。
【解決手段】移動体と通信され、燃料フィルタの純正品に対する圧力データの履歴情報(正規履歴情報)を記憶する移動体管理装置が、移動体から受信した圧力データの履歴情報(移動体履歴情報)を生成し、この移動体履歴情報と正規履歴情報とを比較し、両者に相関がない場合には、移動体履歴情報の初期値と変化量を参照して燃料フィルタの異常を検出する。
(もっと読む)
位置同定システム
【課題】位置の情報が書き込まれたタグ等のランドマークを走行路の床面に設けなくても移動体の位置を把握することができる位置同定システムを提供することを課題とする。
【解決手段】送信器1により外部に超音波が送信され、この超音波の周波数は時間に比例して上昇される。送信器1から送信された超音波は周辺の障害物により反射されて受信器2で受信され、混合器3はこの反射波とそのときの送信器1の超音波とを互いに混合してビートを発生させる。混合器3の出力は、ローパスフィルタ4及びA/D変換器5を介して高速フーリエ変換部6で周波数スペクトルに変換され、相関値算出部7は、記憶部9に予め記憶されている基準の周波数スペクトルと、高速フーリエ変換部6から入力された現在の周波数スペクトルとの相関値を算出し、位置判定部8はその相関値に基づいて移動体Mの位置の判定を行う。
(もっと読む)
作業機搭載車両の周辺監視装置
【課題】作業機を設置させる場合に運転席から降りなくても、運転席から周辺を確実に確認できる作業機搭載車両の周辺監視支援装置を提供する。
【解決手段】作業機搭載車両に、作業機搭載車両の周辺を撮影する監視カメラ10,11と、運転席に配置され該カメラで撮影した画像を表示する表示装置12とを備え、前記監視カメラは同一画面に作業機搭載車両の周辺の他に作業機の可動部状態も撮影する位置に取付けられ、監視カメラからの撮影画像信号は表示装置に画像処理装置13を介して送られるようにし、画像処理装置に作業機の可動部状態位置情報を記憶する可動部状態位置情報記憶部14と監視カメラで撮影した撮影画像に可動部状態位置情報画像を重畳させる合成処理部15とを備え、作業機の前記可動部を可動させていない状態で作業機搭載車両の周辺を前記監視カメラで撮影した画像に作業機の可動部状態位置情報画像を重畳させて表示装置に表示させる。
(もっと読む)
1 - 20 / 41
[ Back to top ]