
Fターム[5H180AA27]の内容
Fターム[5H180AA27]に分類される特許
1 - 20 / 39
退出支援装置
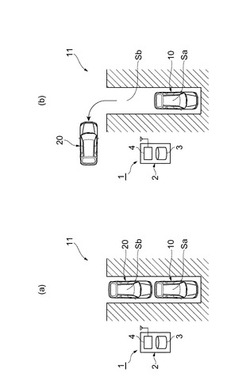
【課題】円滑な交通を確保することができる退出支援装置を提供する。
【解決手段】退出支援装置1は、自車両10の駐車場11からの出庫(退出)を支援するものであり、移動指令部4を有するキー2を備えている。移動指令部4は、他車両20に対して移動指令を送信して他車両20のアクチュエータを適宜動作させ、自動出し入れ機能を実施させる。つまり、退出支援装置1では、他車両20を駐車場11外へ退出させる退出移動指令と、自車両10及び他車両20が駐車場外へ退出した後に他車両20を駐車場11内に再駐車させる再駐車移動指令とが、キー2から他車両20に対して送信される。
(もっと読む)
交通システム

【課題】朝夕の通勤ラッシュ時の駅周辺の道路の渋滞を緩和することができる交通システムを提供する。
【解決手段】鉄道の駅から離れた位置に設けられ、前記鉄道の利用者が使用する移動手段7を保管するパーキングエリア2と、パーキングエリア2と前記鉄道の駅との間をつなぐ道路と、前記道路上を移動して、パーキングエリア2と前記鉄道の駅との間で前記鉄道の前記利用者を輸送する輸送手段4とを備え、パーキングエリア2が、輸送手段4の発着場10と、発着場10の近辺に配置された、移動手段7の保管場所である第1のパーキング11とを有し、パーキングエリア2と前記鉄道の駅との間をつなぐ前記道路の、少なくとも前記鉄道の駅及び発着場10の近辺が、輸送手段4のみが利用できる専用道路である。
(もっと読む)
地図表示システム、端末装置及び地図表示方法
【課題】 いかなる縮尺の地図が表示されていても1回のスクロール操作によってユーザが所望する最適なスクロール量を提供するとともに、複数の表示画面を表示させた場合でも、ユーザが所望する地図情報を見易い態様で表示する。
【解決手段】 端末装置20は、表示画面に地図画像を含む各種画像を表示する表示手段204と、前記地図画像と、前記地図画像よりも広域な範囲を含んだ位置情報の相対的特性を用いた図形画像と、前記図形画像上の前記地図画像に対応する表示範囲を表す枠画像と、を各々異なるレイヤーとして管理し、表示手段204に重ねて表示させる表示制御手段205と、表示手段204に表示する画像に対する操作入力を受け付ける操作入力手段206と、を備え、操作入力手段206による前記図形画像と前記枠画像との相対位置を移動させるスクロール操作に伴い前記地図画像をスクロールさせる。
(もっと読む)
移動体検出方法及び移動体検出システム
【課題】高精度で位置検出ができ、絶対位置が検出できる移動体検出方法及び移動体検出システムを提供する。
【解決手段】移動体1に磁石2を取り付け、互いに直交する2方向の磁界の大きさを検出する磁気センサ3を移動体1の移動経路に臨ませて設置し、磁気センサ3により検出された互いに直交する2方向の磁界の大きさの組み合わせに基づいて磁気センサ3に対する磁石2の位置を検出することにより、移動体1の位置を検出する。
(もっと読む)
移動体の運行管理システム
【課題】無線信号が干渉する等のおそれが少ない状態で、移動体との間での無線通信を行うことを可能にしながら、移動体が走行区間の境界に至ったときに、通信対象である通信用中継装置を切り換えることを適正に行えるようにする。
【解決手段】複数の走行区間毎に無線通信を行う複数の通信用中継装置6のアンテナ部14が、無線信号を二次元方向に伝播して、無線通信可能な通信領域を表面に沿って形成する状態で出力させるシート状のアンテナ本体部15と、接続線13が接続される接続部16とを備えて構成され、アンテナ本体部15が、経路長手方向に沿って長尺状に形成され、且つ、互いに隣接する状態で経路長手方向に沿って並ぶ状態で設置され、移動体1が境界を通過する通過タイミングに至ったときに切り換え判別用条件が満たされたことが判別されるように、アンテナ本体部15における接続部16の接続位置が設定される。
(もっと読む)
車両接地検出装置及びその方法並びに車両
【課題】車両の接地状態を検出することの可能な車両接地検出装置を提供する。
【解決手段】車両の車体と電気的に接続され且つ車両軌道に設置された接地部材に対して接触可能に配置された主導電部材と、前記主導電部材と並列に且つ前記接地部材に対して接触可能に配置された副導電部材と、前記主導電部材及び副導電部材を介して電流が流れるか否かを検出することにより、前記車両の接地状態を検出する電流検出回路とを用いて車両接地検出装置を構成する。
(もっと読む)
新交通システム
【課題】システム全体の低コスト化を図ることが可能な新交通システムを提供する。
【解決手段】車両と地上装置との間で運転制御情報及びコミュニケーション情報の通信を行う新交通システムにおいて、車両及び地上装置は、前記運転制御情報及びコミュニケーション情報の内、前記運転制御情報を優先的に通信するための優先通信手段を設ける。
(もっと読む)
自動搬送装置
【課題】生産工場等で広く使用されている自動搬送装置に関し、騒音や反響の多い場所であっても、自動搬送車の作業状態を作業者等に確実に注意喚起し、安全性に優れる。
【解決手段】所定の搬送路を走行する自動搬送車10と、自動搬送車10の作業状態を示す音声信号を発生する音声装置12と、複数のチャネルを有し当該複数のチャネルから選択する一のチャネルの高周波電波により音声信号を送信する送信機13と、選択された一のチャネルの高周波電波による音声信号を受信して当該音声信号を報知する受信機15a,15b,15cおよび18とを備える。
(もっと読む)
無人航空機のナビゲーションのためのシステム及び方法
【課題】無人航空機(UAV)の航行のためのシステム及び方法を提示する。
【解決手段】好ましい一つの実施形態では、UAVは、少なくとも1つの飛行コリドー及び飛行経路を用いてコンフィギュレーションが行われ、第1のUAV飛行計画が計算される。第1のUAV飛行計画の運行中に、UAVは障害物を視覚的に検出し、この障害物を回避するように第2のUAV飛行計画を計算する。更に、第1又は第2のUAV飛行計画の運行中に、UAVは未知の航空機を音響的に検出し、この未知の航空機を回避するように第3のUAV飛行計画を計算する。加えて、UAVは、地上管制局から受信した情報などのような他の情報に基づいて、新しい飛行計画を計算することもできる。
(もっと読む)
障害物検出装置、及び障害物検出方法
【課題】障害物の誤検出を防止し、障害物の検出精度の向上を図ることができる障害物検出装置及び障害物検出方法を提供することを目的とする。
【解決手段】搬送車両3Aの位置姿勢情報を割り出す位置姿勢情報演算部15bと、搬送車両3Aの周囲環境に関する形状情報を取得する第2レーザスキャナ16と、障害物を検出すべき領域に関する走行ルートSに沿った検出領域情報を記憶する検出領域情報記憶部17aと、形状情報と検出領域情報とから障害物検出領域を割り出す障害物検出領域演算部17bと、その障害物検出領域に基づいて障害物を検出する障害物検出部17cとを備える。この障害物検出装置17Aによれば、非障害物である坑内設備等を障害物として誤検出することが防止され、障害物の検出精度の向上を図ることができる。
(もっと読む)
情報提供システム、情報提供サーバ、情報提供方法、および、コンピュータプログラム
【課題】携帯端末装置において、現在位置取得機能を利用した新たなサービスを提供する。
【解決手段】地図表示システム10は、表示パネル202を有し、複数の利用者にそれぞれ携帯される複数の携帯端末200と、サーバシステム1000を備える。サーバシステム1000は、複数の携帯端末200の現在位置をそれぞれ表す複数の現在位置情報を取得し、複数の現在位置情報に基づいて、複数の携帯端末200を同一の列車単位でグループ化する。サーバシステム1000は、グループに対応する列車の混雑の程度、車両数などのグループ特性情報を生成し、情報対象端末としての携帯端末200に送信する。携帯端末200の表示パネル202には、グループ特性情報が表示される。
(もっと読む)
移動体用測位システム及びGNSS受信装置
【課題】測位精度を向上させること。
【解決手段】GNSS衛星により送信された測位信号に基づいて測位演算を行う移動体用測位システムは、基準局と移動体とを有する。基準局は、固定位置に配置され、該基準局で観測して得られる衛星電波のドップラレンジに基づいて該基準局の速度を測位し、該測位結果に基づいて補正データを生成する手段と、補正データを移動体に送信する手段とを有する。移動体は、基準局から送信される補正データを受信する手段と、該移動体で観測して得られる衛星電波の観測データと、受信した補正データとに基づいて、該移動体の位置を測位する測位手段とを有する。
(もっと読む)
編成搬送台車設備
【課題】複数の独立換向式の車輪装置を有する複数の台車を使用して、大型の運搬物を運搬する。
【解決手段】複数台のうち1台をマスタ台車(MC)とし、残りをスレイブ台車(SC)とし、マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から台車群の編成旋回中心を求め、この編成旋回中心から各車輪装置の編成スレイブ軸目標舵角を演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)とを設け、スレイブ台車(SC)に車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、マスタ台車(MC)からスレイブ台車(SC)の舵角指令部(M20B)に編成目標舵角を送信する伝送ケーブル(43A)を設けた。
(もっと読む)
移動体用測位装置
【課題】本発明は、移動体のリアルタイムの位置を、高精度で測位する移動体用測位装置を提供することを目的とする。
【解決手段】現在時刻における移動体の位置を測位し、所定の出力周期で出力する移動体用測位装置100であって、
前記現在時刻が、GPS演算データ更新時には、GPS演算データ、慣性航法測位手段30、速度検出手段40及び誤差補正手段50を用いて前記移動体の初期位置を算出し、該初期位置算出の際に算出された補正値を用いて、移動体モデル演算手段60が前記現在時刻までの移動体モデルを演算して前記移動体の位置を測位し、
前記現在時刻が、前記GPS演算データ更新時と異なったときには、前記慣性航法測位手段、前記速度検出手段及び前記誤差補正手段を用いて前記移動体の初期位置を算出し、該初期位置算出の際に算出された補正値を用いて、前記移動体モデル演算手段が前記現在時刻までの移動体モデルを演算し、前記移動体を測位することを特徴とする。
(もっと読む)
速度計測装置
【課題】他の移動体へ容易に転用でき、計測した移動体の走行速度から走行ルートにおける移動体の運行状態を特定することができる速度計測装置を提供する。
【解決手段】台車1に、速度検出器3と非接触式速度計4とパーソナルコンピュータ5とバッテリ6で構成する一体型の速度計測装置2を着脱自在に取り付ける。速度検出器3と非接触式速度計4で計測した台車1の走行速度データをパーソナルコンピュータ5に転送する。パーソナルコンピュータ5は、速度データを記録すると共に、走行時間で積分し算出した走行距離データを記録する。また、パーソナルコンピュータ5には、台車1の走行経路図のデータを予め記録しておく。そして、これらのデータに基づいて、台車1の運行状態、例えば、台車1の走行速度が“0”となっている運行停滞場所を特定する。
(もっと読む)
パークアンドライドシステム、当該システムを構成する自動車、および当該システムの制御方法
【課題】自動車から公共車両へのまたは自動車から公共車両への乗り換えをスムーズにすることが可能なパークアンドライドシステムを提供する。
【解決手段】パークアンドライドシステム1は、所望の目的地に行くために自動車から公共車両に乗り継いで移動するためのパークアンドライドシステムであって、当該パークアンドライドシステムの利用者により乗車される自動車20を含んで構成される。自動車20は、パークアンドライドシステムの利用者が公共車両の停留所にて自動車から降車した後に、停留所から駐車場まで自動車を自動的に移動させるパークアンドライド制御部25を備える。
(もっと読む)
運転支援システム
【課題】車両の走行位置に応じた適切な運転支援が行える運転支援システムを提供すること。
【解決手段】運転支援対象である車両に対し運転支援情報を送信して運転支援を行う運転支援システム1であって、運転支援情報として、道路上の位置に対する運転支援の可否情報、道路上の位置における可能な運転支援内容情報、道路上の位置において運転支援に必要な車両装備情報のうち少なくとも一つを含むものを送信する(S10〜S18)。これにより、道路を走行する車両に対して運転支援が行えるか否か、運転支援可能な支援内容、運転支援可能な装備を備えているか否かを認識させることができる。このため、運転支援対象である車両が道路上の位置に応じて運転支援を受けられるか否かを容易に判断することができる。従って、移動体の走行位置に応じた適切な運転支援を行うことができる。
(もっと読む)
移動体用測位装置
【課題】擬似距離の誤差の大きい場合でも精度の良い測位演算を行う。
【解決手段】擬似距離を算出するPSR算出手段と、ADRを算出するADR算出手段と、擬似距離に基づいて移動体の位置を測位する測位手段と、衛星位置を算出する衛星位置算出手段と、前回周期における移動体の位置の測位結果と、前回周期における衛星位置の算出結果との差分ベクトルの大きさに基づいて、前回周期における擬似距離の推定値を算出する前回値PSR推定手段と、推定前回値に、前回周期と今回周期において算出された各ADRの差を足し合わせて、今回周期における擬似距離の推定値を算出するPSR推定手段と、擬似距離の誤差が所定許容範囲を超えたか否かを判定するPSR誤差判定手段とを備え、測位手段は、今回周期において擬似距離の誤差が所定許容範囲を超えたと判定された場合に、該擬似距離に代えて、推定擬似距離に基づいて、今回周期における移動体の位置を測位する。
(もっと読む)
移動体用位置算出装置
【課題】カメラや画像認識装置を用いることなく簡易なアルゴリズムで交差点通過を判定して移動体位置を算出することができる移動体用位置算出装置の提供。
【解決手段】本発明は、移動体に搭載され、該移動体の位置を検出する移動体用位置算出装置において、地球回りを周回する複数の衛星からの電波を受信する受信手段と、前記受信手段における衛星からの電波の受信状態に基づいて、前記移動体が交差点を通過したか否かを判定する交差点判定手段とを備えることを特徴とする。
(もっと読む)
GPS電波遮断物体検出システム
【課題】他の移動経路(14a,14a)の隣接している移動経路(14,14)にGPSアンテナ11が設置されても、高い精度・確度でGPS電波遮断物体(15)を検出する。
【解決手段】GPSアンテナ11と、そのGPS信号を処理して測位結果を出力するGPS受信機12と、その出力Sに基づく電波受信の成否に応じてGPS電波遮断物体の存否を判断する判定装置14と、GPS電波遮断物体の検出に使用するGPS衛星(16)をその方位・仰角・受信レベルと選別用データの方位・仰角・強度閾値との比較に応じて選別する選別手段13cと、その選別結果を一定期間に亘って保持するバッファ手段13dと、移動経路(14,14)に係る進行方向に基づいて選別用データのうち方位の部分を自動設定する方位設定手段13bとを備える。
(もっと読む)
1 - 20 / 39
[ Back to top ]