
Fターム[5H180BB04]の内容
交通制御システム (133,182) | システム、装置の構成 (16,212) | 信号伝送手段、信号伝送方法の限定 (10,726) | 電波の利用 (5,632)
Fターム[5H180BB04]に分類される特許
1 - 20 / 5,632
車載用ナビゲーション装置及び交通情報表示方法
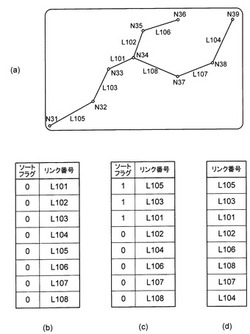
【課題】TMC情報を受信して渋滞情報を高速に表示することが可能な「車載用ナビゲーション装置及び交通情報表示方法」を提供すること。
【解決手段】車載用ナビゲーション装置は、表示手段と、交通情報をTMC放送により受信する通信手段と、交通情報及び道路を複数のTMCリンクに抽象化したネットワーク情報を格納する交通情報記憶手段と、通信手段を介して取得した交通情報を基に渋滞区間を検出する制御手段と、を有する。制御手段は、複数のTMCリンクのうち、ソートされていないTMCリンクを抽出してソートするとともに予めソートされているTMCリンクと結合し、渋滞区間を示すTMCリンクを他のTMCリンクとは異なる態様で表示手段の画面に表示させる。制御手段はTMCリンクのうち一列に接続可能なTMCリンクを抽出してソートするとともに、ソート済みTMCリンクであることを示す識別情報を付与する。
(もっと読む)
運転支援方法及び運転支援装置

【課題】運転支援方法及び運転支援装置において、適切な衝突予想時間を算出してサービス提供の遅れを軽減することにある。
【解決手段】自車両(1a)の位置(Pa)と他車両(1b)の位置(Pb)との間の直線距離(L)と、自車両(1a)の位置(Pa)と他車両(1b)の位置(Pb)とを結ぶ直線(S)と他車両(1b)の位置(Pb)から他車両(1b)の進行方位(Db)へ伸ばした直線(S2)とがなす角度(γ)とを用いて、他車両(1b)の位置(Pb)から他車両(1b)の進行方位(Db)へ伸ばした直線(S2)上に位置し且つ自車両(1a)の位置(Pa)と最短となる点(C)を求め、この点(C)から他車両(1b)の位置(Pb)までの距離(L3)と他車両(1b)の速度(Vb)とを用いて他車両(1b)と自車両(1a)とが衝突するまでの衝突予想時間(TTC)を算出している。
(もっと読む)
共用車両管理装置
【課題】共用車両が所定の駐車領域に返却されたか否かを確実に判定することができる技術を提供する。
【解決手段】単眼カメラ3の撮影画像Fに基づいて認識された所定の駐車領域界隈の基準構成物が記憶手段102に記憶されており、共用車両1が駐車されたときに、単眼カメラ3の撮影画像に基づいて認識された共用車両1が駐車された駐車領域界隈の構成物と、記憶手段102に記憶された基準構成物とが照合手段104により照合され、照合手段104による照合結果に基づいて共用車両1が所定の駐車領域に返却されているか否かが判定手段105により判定されて、所定の駐車領域に駐車される共用車両の貸出状況が管理されるため、従来のようにGPS5などにより取得される車両位置に関する情報を用いなくとも、共用車両1が所定の駐車領域に返却されたか否かを確実に判定することができる。
(もっと読む)
車両経路案内装置
【課題】電力消費地域の供給電力の過不足を緩和する車両経路案内装置を提供する。
【解決手段】車両経路案内装置においては、ECUにより、電力余剰地域で車両の車載バッテリーの充電をおこなう経路、電力不足地域で車両の車載バッテリーの放電をおこなう経路、電力余剰地域で車両の車載バッテリーの充電をおこなうとともに電力不足地域で車両の車載バッテリーの放電をおこなう経路のいずれかの経路で車両10を案内することで、車載バッテリーへの充電により車両が電力余剰地域から電力を受け取り、車載バッテリーからの放電により車両が電力不足地域へ電力を提供する。そのため、電力線網の状況によらずに、車両の車載バッテリーを利用して、複数地区の間の供給電力の過不足を緩和することができる。
(もっと読む)
渋滞判定装置及びコンピュータプログラム
【課題】交差点付近を走行する車両による渋滞要因を判定することができる渋滞判定装置及び該渋滞判定装置を実現するためのコンピュータプログラムを提供する。
【解決手段】通信部12は、車両の走行状態に関する車両情報を取得する。車両判定部13は、車両情報に基づいて、交差点に向かって走行する車両が左折車両か否かを判定する。渋滞判定部14は、車両判定部13で判定した左折車両の歩行者青信号(歩行者青点滅信号を含んでもよい)での速度が、歩行者赤信号での速度より遅い場合、左折車両と歩行者との交錯による左折渋滞と判定する。
(もっと読む)
制御装置及び運転安全性保護方法
【課題】運転者の保護者が、運転者(保護対象者)の運転動作の制限を自ら設定し、また、この運転動作の制限に応じて運転動作の制御を行えるようにする。
【解決手段】車両を使用する使用者を識別する情報又は使用者が分類されるカテゴリを識別する情報と、使用者の行為又は使用者の運転時の車両状態と、その行為又は車両状態が検出された場合の動作制御方法とを規定した制御情報を制御情報格納部130に格納する。ある運転者が車両を実際に運転する際には、使用者認証部140において特定された運転者に対応する制御情報を参照して、車載検出部から供給される検出結果情報に対応する動作制御方法を特定し、動作制御部150が、その動作制御方法に基づいて車載装置の動作制御(駆動制御、警告報知、保護者への通報)などを行う。
(もっと読む)
道路交通情報提供システム及び方法
【課題】道路上を移動している車両に対して、することができる道路交通情報提供システムを実現することにある。
【解決手段】道路交通情報提供システム10は、道路上を走行する車両30に搭載された車載装置31との間で無線通信により情報の交換を行なう複数の路側装置20及びサーバ12を有する。サーバ12は、各路側装置20を介して収集した車両の移動速度に基づいて、配信する道路交通情報の伝送データを分割して各路側装置20に割り当てる。
(もっと読む)
車載端末および車車間通信システム
【課題】車両のユーザが車車間通信システムの通信エリアを認識できるようにするための技術を提供する。
【解決手段】自車両の位置データを取得する位置データ取得部と、他の車両と通信を行い、当該他の車両の位置データを取得する通信部と、前記通信部が他の車両と通信可能な範囲である通信エリアを取得する通信エリア取得部と、取得した他の車両の位置データおよび通信エリアを、地図上に重ね合わせて表示する表示部とを有する車載端末を用いる。
(もっと読む)
渋滞判定装置及びコンピュータプログラム
【課題】交差点付近を走行する車両による渋滞要因を判定することができる渋滞判定装置及び該渋滞判定装置を実現するためのコンピュータプログラムを提供する。
【解決手段】通信部12は、車両の走行状態に関する車両情報を取得する。車両判定部13は、車両情報に基づいて、交差点に向かって走行する車両が右折車両か直進車両かの別を判定する。渋滞判定部14は、右折車両の停止位置が右折専用車線より上流側にあって、直進車両の右折専用車線より上流側での速度が、右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定する。
(もっと読む)
駐車支援方法及びシステム
【課題】車両のタイヤとボディを識別することにより、車両のタイヤ位置や向き、ホイールベース、最小回転半径などを推定して、車両への指示方法をより正確にする。
【解決手段】被誘導者が操作する被誘導車両に対して、駐車開始位置から駐車終了位置まで誘導する。被誘導車両の外部に駐車誘導装置を備え、車両仕様として、車両全長及び車両全幅に加えて少なくともホイールベースをセンシングにより取得し、かつ、車両状態として、車両の現在の位置、向き、及び操舵角を取得する。駐車誘導装置は、取得した車両仕様及び車両状態に基づき車両理想軌道及び理想的な運転操作を算出して、被誘導者に対して音声指示をし、被誘導者は、駐車誘導装置からの音声指示に基づき車両操作を行う。
(もっと読む)
移動体接近通知システムおよびその方法
【課題】音が静かな電気自動車10の接近を通行人に通知する。
【解決手段】接近信号送信装置2は、移動中に騒音が小さくて、通行人にその接近が気づかれにくい電気自動車に設けられ、その接近を示す接近情報を含む接近信号を、例えば、微弱電波として扱われる電力で送信する。接近通知装置3は、通行人により携行され、その受信部は、電気自動車からの接近信号を受信して、その接近信号から接近情報を得て、その通知部は、接近信号が得られたときに、電気自動車が接近したことを、音などで、この接近通知装置を携行する通行人に通知する。
(もっと読む)
車載通信装置および通信方法
【課題】複数の無線方式により運転支援情報が提供される場合に、車両等に状況に応じて適切な運転支援情報を取得することができる車載通信装置を得ること。
【解決手段】地図情報を保持する地図情報提供部6と、自車両の現在位置を含む位置情報を取得する位置取得部7と、自車両の走行速度を含む走行情報を取得する走行情報取得部8と、現在位置の周辺の地図情報を前記地図情報提供部6から取得し、位置情報と周辺情報と走行情報と、に基づいて、使用する無線通信処理手段とアンテナの組み合わせを選択し、選択した組み合わせを指示する無線制御部5と、無線制御部5の指示に基づいて無線通信処理部3−1〜3−nとアンテナ1−1,1−2,2を接続するアンテナ切り替え部4と、を備える。
(もっと読む)
安全運転促進システム
【課題】運転者の危機感を喚起し、重大な被害をもたらす、衝突の危険度の高い、運転行動は、自粛しよう、という運転者の意識を高められるようにする。
【解決手段】前記車間距離と前記停止距離とから自車両がターゲットと衝突する可能性を示す指標として衝突可能性指数を求める手段21と、前記自車両と前記ターゲットとの衝突によって生じると予測される被害度を示す指標として衝突直前の自車両の運動エネルギを求める手段22と、前記衝突可能性指数および前記運動エネルギ値に基づいて衝突のリスクおよび衝突時に予測される被害を自車両の運転室に警報する手段(23,12)と、を備える。
(もっと読む)
TIS−B装置及び情報配信方法
【課題】TIS−Bを利用する場合、二次監視レーダや航空機に悪影響を与えることなく信号を配信する。
【解決手段】二次監視レーダからの質問信号に応答して航空機から送信された応答信号を入力し、当該応答信号に含まれる航空機の位置情報から二次監視レーダのアンテナの向きを予測するアンテナ予測手段213と、アンテナ予測手段213が予測した向きが所定範囲のとき、信号の配信を制限する送信制御手段214とを備える。
(もっと読む)
車群走行制御装置
【課題】通信エラーが生じている期間も追従車が先導車に追従する走行制御を行うことができる車群走行制御装置を提供する。
【解決手段】先導車は、先導車走行計画決定部104で、今後の自車両の走行制御値を示す先導車走行計画を決定し、走行計画送信処理部106では、その先導車走行計画を無線機30から送信する。これにより、先導車は、今後の自車両の走行制御値を事前に送信することになる。追従車はこの先導車走行計画を受信する。追従車は、通信エラーにより先導車走行計画が一時的に受信できない場合が生じても、その通信エラーが生じた時点において先導車が行う走行制御値を事前に受信している。そのため、通信エラーが生じている期間も追従車は先導車に追従する走行制御を行うことができる。
(もっと読む)
車群形成判定装置および車群形成判定システム
【課題】車群走行を行う際に車群を形成するか否かを判定する構成において車載装置が自律的に車群を形成するか否かを判定できるようにする。
【解決手段】車載装置は、車載機受信処理にて、自車両の外部から車群走行すべきか否かを判断するために必要な情報を表す判断情報を取得する(S360)。そして、判断情報を利用して、自車両が他車両との車群を形成するか否かを判定し(S370)、この判定結果を出力する(S380)。このような車載装置によれば、自車両にて判断情報を利用して車群を形成するか否かを判断することができる。つまり、自車両が自律的に車群を形成するか否かを決定することができる。
(もっと読む)
信号制御装置及びジレンマ感応制御方法
【課題】 車両5ごとに正確なジレンマ判定を実行して、隣接交差点との系統制御に及ぶ悪影響を低減する。
【解決手段】 本発明は、交差点Jへの流入道路を走行する車両5が、現サイクルの黄信号開始時において危険ゾーンの走行区間Z1,Z2に存在する場合に、流入道路に通行権を与えている現サイクルの青信号を継続し、存在しない場合に、当該青信号を打ち切るジレンマ感応制御を行う信号制御装置2である。この装置2は、車両5の速度及び位置を取得し、車両5に対応する危険ゾーンを当該車両5ごとに設定し、取得された車両5の速度及び位置と設定された危険ゾーンとに基づいて、車両5がこれに対応する危険ゾーンの走行区間Z1,Z2に存在するか否かを判定する。
(もっと読む)
走行支援装置、方法およびプログラム
【課題】走行安定性を低下させることなく目標位置において目標車速以下となるように走行支援を行うこと。
【解決手段】車両の前方に存在する目標位置および当該目標位置における目標車速を示す情報を取得し、前記車両の前方に存在する路面の摩擦度合が所定の基準より小さい低摩擦区間の長さを示す情報を取得し、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在する場合、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在しない場合に前記目標位置において車速を前記目標車速以下にさせる走行支援を行う際の走行支援開始位置よりも、前記低摩擦区間の長さだけ車両側の位置から前記走行支援を開始するとともに、前記低摩擦区間においては前記走行支援を中断する。
(もっと読む)
車載器
【課題】FM多重放送によって送信される道路交通情報の受信ができない場合に、ユーザにとっての快適性および利便性をより向上させることを可能にする車載器を提供する。
【解決手段】FM多重放送が受信可能な受信エリアの情報および受信エリアごとの停波時間帯の情報を外部メモリ18に予め可能しておく。続いて、外部メモリ18に格納されている受信エリアの情報と位置検出器11で検出した自車両の現在位置の情報とをもとに、自車両が受信エリア内にいるか否かを判定するとともに、外部メモリ18に格納されている停波時間帯の情報とGPS受信機15で検出した現在時刻の情報とをもとに、現在が当該受信エリアの停波時間帯であるか否かを判定し、これらの判定結果に基づいて、交通情報を受信できていない原因を判断する。そして、判断した原因を表示装置19や音声出力装置20によって提示する。
(もっと読む)
運転支援装置
【課題】自車両を車線変更させる場合において、車線変更先の交通流への影響を少なくする。
【解決手段】運転支援装置1は、自車両の車線変更の際に運転を支援する装置であって、車車間通信装置10または車両センサ11により車線変更先の車線における交通状況が取得され、制御ECU20は、取得された交通状況に基づき、自車両の車線変更が、車線変更後における自車両の後続車両に与える影響を予測し、自車両の後続車両に与えられた影響が、車線変更先の交通流に与える影響を予測し、車線変更先の交通流への影響の予測に基づき、自車両の車線変更可否を判定する。これにより、車線変更先の交通流への影響が考慮された上で、自車両の車線変更可否が判断されることとなる。従って、自車両を車線変更させる場合において、車線変更先の交通流への影響を少なくすることが可能となる。
(もっと読む)
1 - 20 / 5,632
[ Back to top ]