
Fターム[5H180CC01]の内容
Fターム[5H180CC01]の下位に属するFターム
赤外線を利用するもの (581)
レーザ光を利用するもの (1,001)
撮像手段を利用するもの (5,550)
レンズ、プリズム系を使用するもの (83)
オンオフ式検出を行うもの (37)
Fターム[5H180CC01]に分類される特許
61 - 80 / 120
車両間情報伝達システム
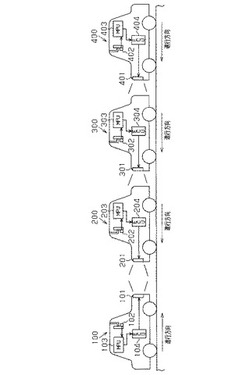
【課題】周囲に存在する車両に対し自車両の視界不良を改善するための情報を適切に伝達することができる車両間情報伝達システムを提供する。
【解決手段】走行する各車両100,200,300,400において前照灯101,201,301,401の光として車両固有の周波数で点滅させる。車両100においてイメージセンサ102を用いて車両200,300,400の前照灯201,301,401が配光不良であるか否かを判定し、配光不良であると、光の周波数から配光不良である車両300を特定し、前照灯101からこの特定した車両300に固有の周波数で点滅する光を発する。車両200,300,400においてイメージセンサ202,302,402を用いて特定した車両300に固有の周波数で点滅する光の周波数から前照灯が配光不良であると検知する。
(もっと読む)
通信システム、車載機、車両及び送信機

【課題】自車の走行位置を精度良く特定することができ、自車の進行方向前方の所定位置までの距離を精度良く求めることができる通信システム、該通信システムを構成する車載機及び送信機並びに該車載機を備える車両を提供する。
【解決手段】車載機20で自車が光ビーコン10との通信可能な領域Aに存在すると判定した場合、車載機20が記憶している領域Aの位置情報、送信機30、40の位置情報、領域Aの上流端から停止線Pまでの距離、送信機30、40から送信された各信号の到達時間差に基づいて、領域Aにおける自車の位置を高精度に特定するとともに、停止線Pまでの距離を高精度に算出する。
(もっと読む)
衝突警報システム
【課題】
電気自動車は静粛ゆえにヒトの衝突の潜在的危険性があり、実際にゴルフ場のカート等で衝突事故が多発している。衝突事故を未然に防止する電気自動車接近警告システムを提供する。
【解決手段】
走行方向にエネルギーEを放射するエネルギー放射手段Rを具備した電気自動車Cと、該放射エネルギーの受信センサーDおよび受信をトリガとして電気自動車Cの接近警報を出力する手段Aを具備した衝突警報デバイスとの組合せによる衝突警報システムであって、衝突警報デバイスが、電気自動車走行エリア管理者が該エリア利用者に貸与する器具・用品に組込み固着されているものである衝突警報システム。
(もっと読む)
道路標示読取装置
【課題】路面に描かれた文字等の道路標示を簡易な構成で正確に読み取ることができる道路標示読取装置を提供する。
【解決手段】検出装置10は、複数の検出ユニット1からなり、車両の床下に設けられる。検出ユニット1は、光源(LED)11とこれに対応する光検出器(センサ)12とからなる。検出ユニット1の各々が車両の幅方向に配置される。光源11の各々が、読取制御部6の制御に従って、所定の周期で、道路に向けて光を照射する。光検出器12の各々が、対応する光源11から所定の周期で照射された光が道路で反射した光を検出して、検出信号として出力する。道路標示認識手段(7)が、光源11からの複数回の光の照射により得られた光検出器12からの検出信号に基づいて、道路標示を認識する。
(もっと読む)
路車間通信の判定システム及び方法とこれに用いる判定装置及び車載機
【課題】 路車間通信の異常を自動的に把握できるようにして、システム管理者やドライバが光ビーコンや車載機のメンテナンスの要否を容易に判断することができる路車間通信の判定システムを提供する。
【解決手段】 本発明の路車間通信の判定システムは、道路Rを走行する車両Cの車載機2と、道路Rの所定範囲に通信領域Aが設定された投受光器16を有し、車載機2との間で路車間通信を行う光ビーコン4と、路車間通信の通信状態を判定する判定装置3とを備えている。車載機2は、通信領域の車両進行方向における通信範囲(ダウンリンク情報44を車載機2が実際に受信できた車両進行方向の範囲)に関する実測情報36を生成する車載制御機28と、その実測情報36を判定装置3に送信するための通信部29とを有する。判定装置3は、受信した実測情報36に基づいて路車間通信の適否を判定する判定部10を有する。
(もっと読む)
路車間通信システム及び方法とこれに用いる光ビーコン、車載機及び車両
【課題】 ドライバに対する安全運転支援や、道路が複数車線である場合のドライバに対する車線通知を精度よく行うことができる路車間通信システムを提供する。
【解決手段】 本発明の路車間通信システムは、道路Rを走行する車両Cの車載機2と、道路Rの所定範囲に通信領域Aが設定された投受光器8を有する光ビーコン4とを備えており、車載機2と光ビーコン4の投受光器8との間で光信号による双方向通信を行う。通信領域A内の所定位置を感知領域Kとする車両感知器5が設けられ、アップリンク情報の受信の有無と車両感知器5からの感知信号s1の受信の有無とに基づいてダウンリンクの切り替えを行うか否かを判定する通信制御部7が光ビーコン4に設けられている。
(もっと読む)
安全運転支援システム及び方法、これに用いる車両及び車載機
【課題】路車間通信が不完全な状態で安全運転支援が続行されるのを未然に防止することができる安全運転支援システムを提供する。
【解決手段】道路を走行する車両Cの運転室に設けられる投受光器20を有する車載機2と、道路の所定範囲にダウンリンク領域が設定された投受光器8を有する光ビーコン4とを備えている。車載機2と光ビーコン3との間で光信号による双方向通信を行い、車両C側において、受信したダウンリンク情報に含まれる支援情報に基づいてドライバに対して安全運転支援を行う。車載コンピュータ19は、前記支援情報に基づいてドライバに対する安全運転支援の制御を行う。さらに、車両Cのワイパ14の運転を検出し、この検出信号に基づいて安全運転支援を停止させることができる。
(もっと読む)
微小回折監視照明装置
能動的な赤外線監視照明装置は、発光ダイオード(LED)列に被せられた、統計学的に一方向性を有する微小回折材料を利用して、LEDからの光を目標物の画像上に屈折させる。同装置は、エネルギー分布プロファイルを、現在の広角目標物と広角カメラ監視システムのアスペクト比に一致する距離まで送り届ける。屈折光の分布は楕円形である。この分布は、LED列内のLEDの様々な個数、明度、及び角度に関連して異なる回折材料を使用することによって変化させることができる。この照明様式を用いると、照明装置の有効範囲が大幅に拡大する。赤外線(IR)放射を垂直方向に10度の窓に制限することによって、広大な地上レベルの光景に対しより多くの有効電力を提供できるようになり、IR照明を監視撮影に更に有効に活用することができ、特に、多車線での車両ナンバープレートの捕捉が可能になる。 (もっと読む)
方向検出装置および移動体位置特定装置
【課題】屋外の外乱光による影響を避けて屋外に設けられた投光機器の方向を正確に検出できるようにした方向検出装置を提供することにあり、光通信方式を適用して移動体の位置を正確に特定できるようにした移動体位置特定装置を提供する
【解決手段】複数のフォトダイオードが、互いに異なる指向性特性を有するように配設されており、当該フォトダイオードが受光した受光信号に含まれるデータ信号成分の大小に応じて路上通信機2の方向(路上通信機2からの受光方向)を検出する。
(もっと読む)
飛行場灯火監視制御システム
【課題】停止線灯や航空機センサを飛行場に設けることなく誘導路走行に関する走行方向ルート指示や安全ルート指示の情報を得ることができ、誘導路を走行する航空機へのより正確な視覚航行援助を行える飛行場灯火監視制御システムを提供することである。
【解決手段】飛行場の誘導路11に設けられた誘導路中心線灯12と、誘導路11近傍に位置する航空機13の位置を検出する航空機位置検出装置14と、航空機13の前方の誘導路中心線灯12と、航空機12の後方の所定の範囲の誘導路中心線灯13との明るさを異ならせて点灯制御する灯火制御装置15とを備える。
(もっと読む)
空港誘導灯制御システム
【課題】空港の誘導路を航空機が安全かつ効率的に走行できる。
【解決手段】滑走路1と駐機位置7とを接続する誘導路3を移動する航空機11の移動位置を検出可能とし、誘導路における中心線に沿って一定間隔で設けられた複数の中心線灯17を設けている。
そして、発着する航空機11の誘導路3内の移動経路22を定め、航空機11が誘導路3に進入すると、誘導路3内の移動経路22に相当する領域の各中心線灯17を点灯する。さらに、移動経路22のうちの航空機11が通行済みの部分22aの中心線灯17を消灯又は暗くする。
(もっと読む)
航空機情報検知システム
【課題】視界悪化時や電波状態が悪い場合であっても、飛行場内を走行する航空機または車両の位置等を検知することを可能とする。
【解決手段】通信器21は、航空機(走行体)1を識別する便情報(走行体識別情報)を航空機1から受信する。通信器識別情報格納部22は、通信器21を識別する通信器識別情報(通信器ID)を予め格納する。情報収集部31は、便情報と共に通信器IDを収集する。灯器座標情報格納部33は、通信器IDに対応付けて当該通信器IDによって示される通信器が設けられている位置を示す座標情報を予め格納する。座標判定部35は、情報収集部31によって収集された通信器IDに対応付けて灯器座標情報格納部33に格納されている座標情報を便情報によって示される航空機1の位置を示す位置情報として取得する。位置情報表示部39は、座標判定部35によって取得された位置情報を表示する。
(もっと読む)
車両の走行ダイナミクスを局所的および時間的に評価および予測するためのドライバアシスタンスシステム
本発明は、交通システム内で車両の走行ダイナミクスを局所的および時間的に評価および予測し、得られた情報を隣接する車両に伝送するためのドライバアシスタンスシステムに関する。本発明では、評価される車両において相互に依存せずに生成されたデータが評価ユニットに収集されて評価され、該データから直後の走行状況に関する予測が生成され、該走行状況は、該走行状況に関与する周辺の車両に伝送される。 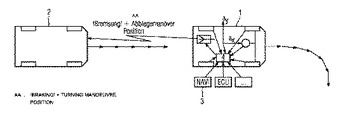 (もっと読む)
(もっと読む)
合流支援装置
【課題】2本の道路が合流する合流部における、事故や渋滞の発生が十分に抑えられる合流支援をドライバに対して行う合流支援装置を提供する。
【解決手段】本線側車両検出部2が本線側における車両の位置を検出し、点灯制御部4が検出された位置に応じて、合流車線側に車両の走行方向に沿って配置された複数のランプ32の点灯状態を制御する。また、合流車線側車両検出部3が合流車線側における車両の位置を検出し、点灯制御部4が検出された位置に応じて、本線側に車両の走行方向に沿って配置された複数のランプ31の点灯状態を制御する。
(もっと読む)
操舵制御システム及び操舵制御装置
【課題】移動体に搭載する太陽電池モジュールの用途を拡大し、太陽電池モジュールの付加価値を向上させる。
【解決手段】操舵制御システムは、車庫の天井など車両の外部に設けられる光源と、この光源から照射される光を受けて車両の操舵制御を行う操舵制御装置15とにより構成される。操舵制御装置15は、車両の天板に縦横に配列された複数の太陽電池セル5により構成される太陽電池モジュール4と、操舵を行うパワステモーター回転制御部10の操舵制御を行う操舵角制御部11とを備えている。この操舵角制御部11は、光源から照射される光を受光している受光太陽電池セル5により形成される受光線と、予め設定された基準線とのズレを算出し、このズレに基づき車両の操舵角を導き出して操舵制御を行う。
(もっと読む)
車体底部の突起物の検知方法及び検知装置
【課題】車両の泥除け等、設定された車両最低地上高を下回るが入庫に何ら支障を生じない突起物の判別を、正確かつ迅速に行う。
【解決手段】突起物検知センサ36による検知信号S36が、車輪38の検知による一度目のON(ON1)となり、続いて、車輪検知センサ34の検知信号がOFFとなった後、突起物検知センサ36による検知信号S36が、一時的にOFF、二度目のON(ON2)、再度のOFFの順序で検知されたとき、突起物検知センサ36の検知信号S36の最初のON時間t1を、突起物検知センサ36の検知信号の一時的なOFF時間t2、及び、二度目のON時間t3の双方と比較する。この比較結果に基づき、一時的にOFFとなる検知信号が車輪38と泥除け46との隙間によるものであり、かつ、二度目のONとなる検知信号が、泥除け46を検知したことによるものであると判断する。
(もっと読む)
画像認識装置、画像認識方法および車両制御装置
【課題】画像から検出された判別の候補となる物体が歩行者以外の所定の動物(例えば、犬や猫などの四足動物)を判別して、歩行者であるか、歩行者以外の動物であるかを明確に区別することを課題とする。
【解決手段】画像から検出された判別の候補となる大きさ50cm未満の物体の輪郭および大きさと、犬や猫などの尻尾のパターンの形状および大きさとを比較して、その一致度を示す判定出力値(例えば、A)が、所定の閾値(例えば、I)を超えている場合(例えば、A≧Iである場合)には、判別の候補となる物体について歩行者以外の所定の動物の特徴である尻尾が確認されたことから、判別の候補となる物体が歩行者以外の所定の動物であると判別する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】自車両に起因する様々なリスクを区別して運転者に分かりやく伝達する車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両を要因とする複数の異なるリスクについてリスクポテンシャルをそれぞれ算出する。自車両の運動エネルギに起因するリスクポテンシャルは、リスクポテンシャルが増大するに従って徐々に増加する反力をアクセルペダルから発生させることによって、運転者に伝達する。自車両の走行規則に起因するリスクポテンシャルは、そのリスクが発生したときに不連続に変化する付加反力をアクセルペダルに付加することによって運転者に伝達する。
(もっと読む)
機械式駐車装置における車両の車輪判別方法及び車輪判別装置
【課題】車種判別エリアを車両が斜めに進入するような場合であっても、車両の車輪判別を正確かつ迅速に行い、車種の判別精度を高める。
【解決手段】車輪検知センサのON、OFF、ON、OFFの順序の検知信号が、2セット検知され(1セット目はステップ(20)及び(30)、2セット目はステップ(50)及び(70)である。)、なおかつ、各セットにおいて、先のON信号の検知開始時間と、後のON信号の検知開始時間との時間差を、先のON信号の検知時間長で除した値が、基準値未満であり(ステップ(40)及び(80))、更に、1セット目の検知で得られる、車輪検知センサを先に通過する車輪の検知時間長と、2セット目の検知で得られる、車輪検知センサを先に通過する車輪の検知時間長との比が、所定範囲内にあるとき(ステップ(60))に限り、車輪配置OK(ステップ(100))と判定する。
(もっと読む)
情報処理装置
【課題】ETC端末として簡単に設定することができるようにする。
【解決手段】本発明に係る情報処理装置に適用可能なカメラ付ディジタル携帯電話機においては、車両情報取得要求生成部122は、車両内のパーソナルコンピュータなどから車両情報の取得を要求する車両情報取得要求を生成し、車両情報無線通信部118は車両情報取得要求をパーソナルコンピュータなどに送信するとともに、パーソナルコンピュータなどから車両情報を受信する。車両情報取得部123は車両情報を取得し、補助記憶部124は取得された車両情報を記憶する。固有情報生成部125は、カメラ付ディジタル携帯電話機の固有情報を生成し、車両情報無線通信部118はカメラ付ディジタル携帯電話機の固有情報をパーソナルコンピュータなどに送信する。ETC処理実行制御部126は、ETC処理の実行を制御する。
(もっと読む)
61 - 80 / 120
[ Back to top ]