
Fターム[5H180CC03]の内容
Fターム[5H180CC03]に分類される特許
1 - 20 / 1,001
危険判定装置及びプログラム
【課題】可動物の数が増えても計算時間の増大を抑制して、衝突の危険性を判定することができるようにする。
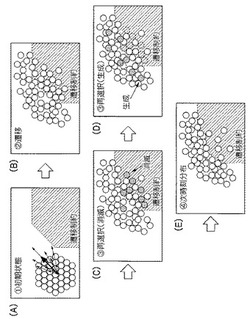
【解決手段】可動物進入可能性マップのブロックに格納された可動物粒子の移動状態を、ランダムデータに基づいて変更して、各可動物粒子が格納されるブロックを移動させることを繰り返し行う。各可動物粒子の移動により、遷移制約を受ける領域のブロックに格納された場合、可動物粒子を消滅させると共に、同じ可動物の可動物粒子を複製して、同じ可動物の他の可動物粒子が格納されたブロック又はその周辺のブロックに、複製された可動物粒子を格納する。他の可動物の可動物粒子と重複したことにより消滅した可動物粒子の組み合わせの消滅位置を示す消滅情報を記録する。記録された消滅情報の消滅位置に基づいて、可動物同士が衝突する危険性がある位置を判定する。
(もっと読む)
追突警報装置および追突警報方法

【課題】
自車両と先行車の衝突を防止するための警報を発する際に、自車両の走行状況に応じて警報を発するタイミングを調整し、運転者の不快感を和らげる追突警報装置および追突警報方法を提供すること。
【解決手段】
S20にて先行車が車線変更を行っていると判定された場合、S21にて自車両が先行車の追越しを行っていると判定された場合、または、S22にて自車両が減速を伴いながら先行車に接近していると判定された場合は、警報を発するタイミングを調節することで不要な警報を発することが防止される。これによって、運転者の不快感が和らげられる。
(もっと読む)
運転支援装置及びプログラム
【課題】他の走行体視点の状況も考慮した精度の高い衝突判定を行う。
【解決手段】環境認識部32で、レーザレーダ12、撮像装置14、GPS装置16、車両センサ18の各データ、及び地図情報を用いて、自車両の現在の状況及び自車両を基準とした他の走行体の状況を示す自車両ベクトルと、他の走行体の現在の状況及び他の走行体を基準とした自車両及びその他の他の走行体の状況を示す走行体ベクトルを算出する。行動予測部40で、算出された自車両ベクトル及び走行体ベクトルと、変化モデル記憶部38に記憶された自車両及び他の走行体の行動状態の変化を予測するための自車両変化モデル及び走行体変化モデルとを照合して、自車両及び他の走行体の行動状態の変化を予測し、衝突判定部42で、予測結果に基づいて、自車両と他の走行体との相対距離を算出して、自車両と他の走行体との衝突の可能性を判定する。
(もっと読む)
前方状況予測装置
【課題】信号サイクル情報を用いることなく、前方の信号交差点の交通流状況を予測することが可能な前方状況予測装置を提供する。
【解決手段】本発明の一実施形態に係る前方状況予測装置80は、周辺車両の走行状態情報を取得する情報取得手段81と、信号交差点のための車両の速度変化パターンを予め記憶する記憶手段83と、情報取得手段81によって取得した少なくとも1台の前方車両の走行状態情報と記憶手段83に記憶した速度変化パターンとを比較し、前方車両の減速要因又は停止要因を予測することによって、前方の交通流状況を予測する減速停止要因予測手段84と、を備える。
(もっと読む)
移動体位置検出装置
【課題】位置情報精度を高めることができると共に、常時、その高い位置情報精度を維持できる移動体位置検出装置を提供する。
【解決手段】レーザレーダ3の検出データに基づく周辺物の複数の節点sと、地図データ上の当該周辺物の複数の節点mとを対応付け、その対応付けられた各組の節点s、mを用いて、座標変換式に基づき誤差θ、qx、qyを算出し、その誤差θ、qx、qyに基づきGPSにより検出された自車1位置を補正する。これにより、ありふれて存在する周辺物に関する複数の節点に基づき誤差算出を可能とし、誤差算出精度を高めると共に、位置補正頻度を高める。
(もっと読む)
通行物体管理システム
【課題】通行する物体を正確に管理する。
【解決手段】三次元形状測定装置100aが、通行路の入口を通過する物体の三次元形状と進行方向とを測定する。三次元形状測定装置100bが、通行路の出口を通過する物体の三次元形状と進行方向とを測定する。物体が通行路内に進入した場合、三次元形状測定装置100aが測定した三次元形状を、通路内物体形状記憶部220が記憶する。物体が通行路外へ退出した場合、三次元形状測定装置100bが測定した三次元形状と、通路内物体形状記憶部220が記憶した三次元形状とを、通過物体判定分240が比較して、同一物体であるか否かを判定する。
(もっと読む)
車両周辺監視装置
【課題】グレースケール画像に対して微分フィルタによるフィルタ処理を実施してから、2値画像を生成したときに、対象物の画像の欠損が生じることを抑制した車両周辺監視装置を提供する。
【解決手段】レーザーレーダー8により検出された物体と車両との相対位置に基づいて、微分フィルタによるフィルタ処理が実施されたフィルタ処理後画像Im2内に、該物体の実空間における位置及び大きさに対応した位置及び大きさの処理対象領域を設定する処理対象領域設定部15と、フィルタ処理後画像Im2に対して、前記処理対象領域を、前記処理対象領域の設定対象となった物体と前記車両との距離が短いほど低い輝度値に設定された2値化閾値により2値化する処理を行って、2値画像を生成する2値画像生成部14とを備える。
(もっと読む)
物体認識装置
【課題】車両と認識対象である物体との距離が変化しても、車載レーダの反射の検出パターンから車両、モータバイク、人(歩行者)等を区別して精度よく認識することができる技術を提供する。
【解決手段】探査対象となる物体とレーザレーダ2との距離に応じて変化するレーザレーダ2の反射の検出パターンが、距離ごとの特徴パターンとして物体の種類別に記憶部7に記憶されており、レーザレーダ2の反射の検出パターンと、記憶部7に記憶された特徴パターンとが認識処理部4により照合されて検出パターンの物体の種類が識別されるため、車両と認識対象である物体との距離が変化しても、レーザレーダ2の反射の検出パターンから車両、モータバイク、自転車、歩行者(人)等を区別して精度よく認識することができる。
(もっと読む)
車両判定システム及び通行物体管理システム
【課題】通行する物体が車両であるか否かを正確に判定する。
【解決手段】三次元形状記憶部211は、車両である物体と車両でない物体とを含む複数の物体の三次元形状を記憶する。三次元形状照合部212は、三次元形状測定装置が測定した物体の三次元形状と、三次元形状記憶部211が記憶した三次元形状とを比較して、最も近い三次元形状を判定する。種別判定部213は、三次元形状照合部212の判定結果に基づいて、三次元形状測定装置が三次元形状を測定した物体が、車両であるか否かを判定する。
(もっと読む)
車両制御装置
【課題】自車両と前方物標との間の衝突を防止するための運転支援を、衝突の危険性の度合に応じて行うことができる車両制御装置を提供する。
【解決手段】判定ユニットにより、少なくとも自車両と前方物標との間の相対速度に基づいた第1の値と、前記自車両と前記前方物標との間の相対加速度に基づいた第2の値の算出および前記第1の値、前記第2の値が閾値を超えたか否かの判定を行い、前記判定ユニットにより前記第1の値、前記第2の値が閾値を超えたと判定され、運転支援ユニットが前記自車両の運転支援を行う際、前記第1の値及び前記第2の値の双方が閾値を超えた場合は、前記第1の値もしくは前記第2の値の一方が閾値を超えた場合よりも、前記運転支援の介入量を多くする。これにより、自車両と前方物標との間の衝突を防止するための運転支援を衝突の危険性の度合に応じて行うことができる。
(もっと読む)
安全度提示装置及びプログラム
【課題】自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させる。
【解決手段】追従状況判定部22で、車間距離センサ12及び車速センサ14の検出値に基づいて、自車両と先行車両とが追突する可能性があるか否かを判定し、追従度算出部24で、先行車両との追突の可能性があると判定された場合に、車間距離センサ12及び車速センサ14の検出値に基づいて、車間距離及び相対速度Vrを用いた追従度、車間距離及び自車両の速度Vfを用いた追従度、並びに車間距離及び先行車両の減速度Apを用いた追従度を含む複数の追従度を算出し、安全度演算部26で、算出された複数の追従度に基づいて、1つの追従安全度を演算し、表示装置18に表示する。安全度更新部28では、安全度演算部26での演算の基準を走行開始からの経過時間に応じて更新する。
(もっと読む)
運転支援装置、及び運転支援方法
【課題】安全運転のための情報を運転者の注意状態に応じて適切に提供すること。
【解決手段】入力部2で計測された信号を元に注意すべき物体を検出する注意物体検出部3では、すぐに危険ではないが注意すべき一つ以上の物体を抽出する。運転者1に装着された生体信号検出部4で計測された脳波の信号を解析し、注意量推定部5で注意量が推定される。情報決定部6では、注意量推定部5から得られる注意量に基づき、注意物体検出部3にて検出された物体のうち、どの情報を運転者1に呈示するかを決定する。例えば、運転者1の注意量が低下した場合には、多くの物体を呈示すると運転の妨げになるために、表示個数を減らす制御が行われる。
(もっと読む)
衝突防止装置
【課題】誤動作のおそれが小さく、移動体同士の衝突を防止する効果をより大きくすることができる衝突防止装置を提供する。
【解決手段】衝突防止装置34は、それぞれ異なる方向から近づいてくる移動体を光により検出するための車両検知・警告レーザユニット60,62と、車両検知・警告レーザユニット60,62の各々により移動体が検出されたことに応答して、当該移動体のうち少なくとも一方に対し、レーザ描画装置54などを用いて他方の移動体の存在を告知することにより移動体同士の衝突を防止するための制御装置68とを含む。
(もっと読む)
車両制御装置
【課題】車々間通信できない他車両のうち、協調走行制御の制御内容に影響を与える他車両を検出し、画面上でその他車両を強調して表示する。
【解決手段】車々間通信機能を有していない他車両であって、自車両の協調走行制御の制御内容を変更する可能性のある制御対象車両を特定し、その車両のアイコンを地図画面上で強調表示する。
(もっと読む)
運転支援装置
【課題】 安価な構成で運転技術が高くない人が陥りやすい多くの場面において安全運転に寄与することができる運転支援装置を提供する。
【解決手段】 測定手段2は、車両前後に取り付けられ、車両から障害物までの距離を測定し距離情報を取得する。車両情報収集手段5は、車内ネットワークより車両情報を取得する。誤発進判定手段3は、距離情報及び車両情報に基づいて車両の誤発進を判定する。追突推定手段3は、距離情報及び前記車両情報に基づいて後続車両との追突可能性を推定する。警報手段4は、誤発進判定手段及び追突推定手段の判定結果に基づいて警報を行う。車両情報収集手段5は、少なくとも速度情報及びギアポジション情報を取得する。
(もっと読む)
車両制御装置
【課題】自車両周囲に車々間通信できない他車両が存在して、協調走行制御の安全性に影響を与えないようにする。
【解決手段】車々間通信できない他車両のうち、協調走行制御の制御内容に影響を与える他車両を検出し、協調走行制御の制御内容を変更する。車々間通信により前方車両と所定の車間距離を保持しつつ追従走行する制御中は、前方車両との車間距離を長く設定する。
(もっと読む)
運転支援装置
【課題】自車両周辺の移動体の将来の移動状態を高精度に予測する運転支援装置を提供することを課題とする。
【解決手段】自車両周辺の移動体の将来の移動状態を予測し、当該将来の移動状態に基づいて運転支援を行う運転支援装置1であって、移動体の現在の移動状態を取得する移動状態取得手段10と、取得した移動体の現在の移動状態に基づいて移動体の将来の移動状態を予測する移動状態予測手段32と、移動体周辺の交通規則情報を取得する交通規則情報取得手段11を備え、移動状態予測手段32は、取得した交通規則情報を用いて移動体の将来の移動状態を予測することを特徴とする。
(もっと読む)
駐車場出入口の警報装置
【課題】自動車と人とを識別してそれぞれに応じた警報を発することができ、しかも設置工事が簡単で、幅広の駐車場出入口に適した駐車場出入口の警報装置を提供する。
【解決手段】駐車場の出入口に小間隔Lを明けて2個配置されたレーザセンサ5、6と、これらのレーザセンサに接続された演算装置3と、警報器4とからなる。演算装置3は、自動車または人の通過によりレーザセンサ5、6が順次遮光されたとき、レーザセンサ5、6間の遮光時間差tとそのn倍の遅延時間ntを演算する演算手段11と、遅延時間nt中の遮光状態により自動車と人を判別する判別手段12とを備え、警報器4は判別結果に応じた警報を発する機能を備える。
(もっと読む)
ふらつき判定装置
【課題】周辺車両の検出範囲を狭めることなく、周辺車両のふらつき判定の精度を高めることが可能なふらつき判定装置を提供する。
【解決手段】本発明の一実施形態に係るふらつき判定装置70は、第1の検出手段20によって検出された周辺車両の第1の位置情報(距離、横位置)を求める第1の演算手段20と、第1の検出手段20と異なる検出原理を用いる第2の検出手段30によって検出された周辺車両の第2の位置情報(距離、横位置)を求める第2の演算手段30と、第1及び第2の位置情報を融合して周辺車両の融合位置情報(距離、横位置)を求める融合演算手段74と、周辺車両の存在位置に基づいて、第1及び第2の位置情報、並びに融合位置情報のうちの何れかを選択する選択手段75と、選択された位置情報(距離、横位置)の時間的変動に基づいて周辺車両のふらつき判定を行う判定手段76とを備える。
(もっと読む)
撮像装置および料金収受システム
【課題】フロントガラス角度の異なる車両に対しても、太陽光等によるフロントガラスの反射光の影響を低減して、車両内の運転者などの人物を高画質な動画として撮像できる撮像装置を提供する。
【解決手段】撮像エリア内の任意の車両位置における任意の角度のフロントガラスからの反射光を最小に抑えるために、設置位置および撮像面側に装着する偏光フィルタの偏光角を最適化した複数のカメラを設け、車両のフロントガラス角度および車両位置を測定し、測定したフロントガラス角度および車両位置に基づき、複数のカメラの中から車両のフロントガラス角度と車両位置に対して最適なカメラを選択し、この選択したカメラから動画を取得する。
(もっと読む)
1 - 20 / 1,001
[ Back to top ]