
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
2,001 - 2,020 / 5,473
車線維持支援装置
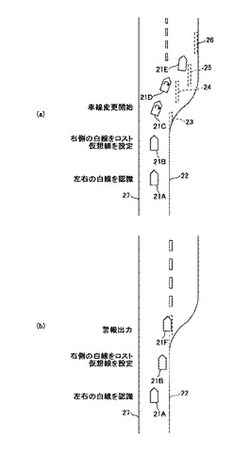
【課題】左右の車線区分線の一方しか認識できない場合、認識できない側の逸脱を適切に判定し不要警報の出力や不警報を防止する車線維持支援装置を提供すること。
【解決手段】自車両21の左右少なくとも一方の車線区分線の逸脱傾向を検出して乗員に警告する車線維持支援装置100において、車線区分線を認識する車線区分線認識手段12と、車両の操舵を検出する車両操作検出手段42と、を有し、左右の車線区分線のうち検出できない側へ、車両操作検出手段42により車両の操舵が検出された場合、左右の車線区分線のうち検出できない側のみ逸脱傾向の検出を緩和する、ことを特徴とする。
(もっと読む)
車両ナンバー撮影システム、車両ナンバー撮影方法

【課題】定点監視カメラの設置場所において撮影環境の変化に対応して、常に安定した明るさで、通行車両のナンバープレートを撮影および認識できるようにする。
【解決手段】この車両ナンバー撮影システムは、撮影方向を道路に向け、少なくとも視野の一部に道路を走行する車両21のナンバープレート22が入るように路側部に配設され、外部から制御を受けて受光量を可変して映像を撮影する動画撮影用のカメラ2aと、このカメラ2aからナンバープレート22の位置の奥手に配設され、所定の反射率を持つ基準面1aを有する基準板1と、カメラ2aで撮影された基準板1を含む範囲の光量を所定期間サンプリングして得た明度値の中から、通過した車両のナンバープレート22の明度値を除外した明度値を得る基準明度算出部4と、取得された明度値と予め設定された明度値との差分に応じてカメラ2aの受光量を制御する制御部5とを備える。
(もっと読む)
ナビゲーション装置
【課題】付加情報が表示されたことを運転者に容易に気付いてもらえることを可能としたナビゲーション装置の提供。
【解決手段】本発明は、各種情報を表示画面上に表示するナビゲーション装置10において、表示画面上に所定の付加情報を表示する場合に、表示画面の少なくとも一部の表示領域を点滅させることを特徴とする。この際、好ましくは、車速が所定値以上の場合には、前記点滅を実行せず、車速が所定値未満の場合には、前記点滅を実行する。
(もっと読む)
駐車支援装置
【課題】本発明は、短時間で車両を駐車目標位置に駐車させることができ、ユーザの利便性を向上させることができる駐車支援装置を提供することを目的とする。
【解決手段】本発明による駐車支援装置は、現在の車両位置に対して所定の位置関係にある位置を駐車目標位置として、現在の車両位置から前記駐車目標位置までの車両経路を車両移動中に算出する。更に駐車支援装置は、該車両経路が算出できたとき、駐車可能であることを知らせる通知手段を備えている。
(もっと読む)
移動体検出装置、移動体検出方法および移動体検出プログラム
【課題】移動体の画像上の大きさに関わらず(移動体が遠方に存在する場合でも)、移動体を正確に検出すること。
【解決手段】移動体検出装置100は、オプティカルフロー方式により画像内の移動体を検出するオプティカルフロー移動体検出部130と、フレーム間差分法により画像内の移動体を検出するフレーム間差分移動体検出部140とを有し、自車両が停止状態に応じて、オプティカルフロー移動体検出部130あるいはフレーム間差分移動体検出部140による検出結果を出力する。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、自車両のGPS位置情報を検出するGPSセンサ11と、自車両と同一車線を走行する1つ以上の他車両でそれぞれ検出されたGPS位置情報を受信する受信部12と、GPSセンサ11により検出された自車両のGPS位置情報と、受信部12により受信された他車両のGPS位置情報と、に基づいて、自車両の走行方向に対して横方向の絶対位置を推定する車両横位置推定部17と、を備えている。
(もっと読む)
対象領域決定方法及び対象領域決定装置
【目的】車下陰やエッジのような特徴を用いなくても画像から対象の関心領域を決定することが可能な「対象領域決定方法及び対象領域決定装置」を提供することである。
【構成】本発明は、画像から対象物(車両)の有無や対象物の識別をするための関心領域を決定する方法及び装置であり、(1)撮像画像における角点(輝度変化の大きな点)を検出するステップと、(2)検出された角点に基づき、撮像画像から対象物体のエッジを取得するステップと、(3)取得されたエッジ上の角点に基づき、関心領域に含まれる角点を寄せ集めるステップと、(4)撮像画像における寄せ集められた角点で形成された画像領域を、対象物体を含む可能性がある関心領域として決定するステップとを含む。
(もっと読む)
走行支援装置
【課題】自車両の運転者に、自車両の周囲の物体に関する情報をより有効に提供する。
【解決手段】情報表示器12は、カメラ、レーダ等自律センサ2が検出した物体の中で、ドライバ視線検出カメラ1により検出された運転者の視線が向けられた物体、及びドライバ視線検出カメラ1により検出された運転者の視線が情報表示器12より提供される当該物体に関する情報の表示位置に向けられた物体については、当該物体に関する情報の提供を一定時間だけ規制するとともに、一定時間経過後は当該物体に関する情報の提供の規制を解除する。これにより、運転者が一度注意を払った物体については情報の提供を一定時間規制することで運転者への煩わしさを軽減し、一定時間経過後は当該物体への注意を再度促すため、時間の経過に伴い運転者の注意が薄れることを防止でき、自車両の周囲の物体に関する情報をより有効に提供できる。
(もっと読む)
警告装置、警告方法および警告プログラム
【課題】画像から検出した移動体および自車両の運転状況に応じて、適切なタイミングで運転手に注意喚起すること。
【解決手段】警告装置100は、車両に搭載したカメラにより撮影された画像に基づいて、移動体検出部120が移動体を検出した場合に、出力部150が一様に警告音を出力するのではなく、警告判定部140が自車両の運転状況情報(アクセルフラグ、ブレーキフラグ、車速フラグ)に応じて警告音の種類(第1の警告音あるいは第2の警告音)を判定し、判定結果に応じて出力部150が警告音を出力する。
(もっと読む)
車両存否判定装置、車両存否判定方法及びプログラム
【課題】画像式車両検知器において、比較的簡単な演算処理で精度の高い車両検出を実現すること。
【解決手段】画像式車両感知器1の制御装置20では、1)カメラ10による撮影画像と所定のテンプレート画像とのパターンマッチングを行ってマッチング率Rを算出し、所定閾値と比較することによる停止車両の検出と、2)フレーム間差分法を用いた移動車両の検出とを行い、双方の検出結果をもとに車両の存否を判断する。また、移動車両の移動速度Vをもとに、当該移動車両の前方の他の車両が存在しないと推定される領域(車両無し推定領域)を判断し、この車両無し推定領域のマッチング率Rの閾値を、停止車両の検出の際に算出された当該領域のマッチング率Rに応じた値に変更する。
(もっと読む)
車線逸脱警報装置
【課題】
ビデオカメラでの白線検出による簡易で正確な車線逸脱警報装置の提案。
【解決手段】
車両側辺に設置したビデオカメラの撮影画像から、車両側辺接地部と道路上に引かれた白線との道路横断方向距離を計測し、その計測結果の距離が一定値以下である場合には車両が白線に接近しすぎて走行しており車線逸脱の恐れがあるとして、また前記計測結果の距離が一定範囲内であって尚且つ車両走行方向の白線に対する傾きが白線に接近する方向に一定値以上である場合もまた、このまま走行を続けると車線逸脱の恐れがあるとして、各々警報を発する。
(もっと読む)
ナビゲーション装置
【課題】車両が駐車場に進入したことを検出するナビゲーション装置を提供する。
【解決手段】フロントカメラ19により車両前方を撮像する。フロントカメラ19により撮像された路面の画像40Aについて、輝度変化の大きいエッジを抽出する。エッジを抽出したエッジ画像40Bに基づいて、路面の白線を認識し、認識した白線が駐車場の区画であるか否かを判定することにより、車両が駐車場に進入したことを検出する。車両が駐車場に進入したことを検出すると、マップマッチングを行わない。
(もっと読む)
白線検出装置
【課題】低負荷かつ高精度に道路面上の白線を検出する白線検出装置を提供することを課題とする。
【解決手段】道路面に描かれた白線を検出する白線検出装置1であって、電磁波を送信し、当該送信した電磁波の反射波を受信する電磁波送受信手段2と、その電磁波の送信及び受信に基づいて検出点までの距離を算出する距離算出手段2と、検出点までの距離に基づいて道路面を推定する道路面推定手段6と、道路面と推定された各検出点に対する電磁波の送信強度と受信強度に基づいて白線を検出する白線検出手段6とを備えることを特徴とし、同一の検出点に対する電磁波の送信強度と受信強度及び距離に基づいて当該検出点での反射率を算出する反射率算出手段6を備え、白線検出手段6は、道路面と推定された各検出点での反射率に基づいて白線を検出すると好適である。
(もっと読む)
車両用周囲監視装置、車両用周囲監視装置の表示制御方法及び車両用周囲監視装置に実行させる表示制御プログラム
【課題】車両フロント部の撮像カメラによる画像が必要な状況を的確に判断し、自動的に撮像画像を表示可能な車両用周囲監視装置とする。
【解決手段】車両が現在走行する道路の地図情報を有する車両用ナビゲーションシステムと、車両の周囲の画像を表示する表示部とを備える車両用周囲監視装置であって、前記車両用ナビゲーションシステムからの入力情報に基づき、車両が現在走行する道路と、車両が現在走行する道路の前方で交差する道路との優先度を判断する優先度判断部を備え、優先度判断部が、車両が現在走行する道路の優先度は、前方で交差する道路の優先度よりも低いと判断すると、表示部に車両のフロント部に備えられたカメラが撮像した車両の周囲の画像を表示させる表示制御部を備える車両用周囲監視装置とする。
(もっと読む)
車両の走行支援装置
【課題】対向車と自車との間の静止物体の有無やその静止物体の形態を考慮して、必要以上に早期に警報発生や自車の制動などの接触対策処理が実行されるのを防止しつつ、適切なタイミングで該接触対策処理を実行することができる車両の走行支援装置を提供する。
【解決手段】対向車と自車1との間に静止物体が検出されている状況で、静止物体が、車両の通過が可能な物体であるか否かを判断する自車・対向車間静止物体判断手段7を備える。接触可能性判断手段9は、自車・対向車間静止物体判断手段7の判断結果が肯定的となる場合に、対向車と自車1との間に静止物体が検出されていない場合よりも、対向車と自車1との接触可能性が有るか否かの判断結果が肯定的な判断結果となるのを抑制する。
(もっと読む)
車両用情報提示装置
【課題】運転者の死角に存在する接近物体を素早く確実に運転者に提示する。
【解決手段】自車両の正面、右側方、左側方を撮像する正面カメラ2、右カメラ3、左カメラ4と、カメラ2〜4で撮像した撮像画像を車内に表示するディスプレイ5と、右カメラ3と左カメラ4で撮像した撮像画像に基づいて自車両に接近する接近物体を検出する接近物体検出部12と、接近物体検出部12により検出した接近物体に関する情報を運転者へ報知する報知用画像を前記撮像画像に重畳表示する画像制御部11と、を備えた車両用情報提示装置1において、ディスプレイ5は自車両前方領域および左右側方領域の撮像画像を表示可能であり、画像制御部11は、自車両前方領域の撮像画像の中央に報知用画像を重畳表示するとともに、接近物体が検出された場合には報知用画像を接近物体が存在する方向を示す画像に変更する。
(もっと読む)
航空機を位置合わせするための装置および方法
【課題】航空機を地上のエリアに対して位置合わせするための装置および方法を提供する。
【解決手段】航空機を地上のエリアに対して位置合わせするための装置が提供される。その装置は、搭載型の着陸システムを有する航空機を含み、搭載型の着陸システムは、地上のエリアの画像を記録するように構成される。装置はまた、地上のエリア上の位置マーカと、記録された画像のエリアの少なくとも一部を示す保存された画像とを含む。搭載型の着陸システムは、位置マーカから情報を取得し、その情報を使用して、記録された画像を保存された画像に対して位置合わせするように構成される。
(もっと読む)
車両通行監視及び規制システム
【課題】車両の通行が制限された車線での異常通行を的確に検知し、また監視する。
【解決手段】特定の車両の通行のみを許容するように開閉するゲート14が車線10に設けられた車両通行規制システムにおいて、車両の異常通行を検知する装置を備える。この装置は、車両の通過を検出する手段52と、ゲート14が開門したことを検知する手段54とを備え、開門状態でないにもかかわらず車両の通過が検出された場合に異常判定信号を出力する。この異常判定信号は、録画装置40に入力され、この録画装置40が異常通行に関する画像のみを保存することを可能にする。
(もっと読む)
車両用逆走防止装置
【課題】ユーザ利便性を向上させた車両用逆走防止装置を提供すること。
【解決手段】自車両の逆走を検出する車両用逆走防止装置が、交差点接近時の自車両運転者の挙動を記録する記録手段と、この自車両運転者の挙動の履歴から、交差点における自車両の進行方向を予測する予測手段と、この予測された予測進行方向に進入禁止道路が存在するか否かを判定する判定手段と、予測進行方向に進入禁止道路が存在すると判定されたとき、自車両運転者に警報を発する警報手段と、警報が発せられた後、自車両運転者が予測進行方向へ向けて操舵した場合には、そのような操舵を妨げようとする方向に操舵反力を発生させる操舵反力発生手段と、この操舵反力に抗う操舵力で自車両運転者が予測進行方向へ向けて更に操舵した場合に、自動的にアクセルをオフにする又はブレーキを掛ける減速手段とを備える。
(もっと読む)
車両の走行支援装置
【課題】前走車の追い越しなどのために自車が一時的に対向車線にはみ出す走行を行なう場合に、必要以上に早期に警報発生や自車の制動などの接触対策処理が実行されるのを防止することができる車両の走行支援装置を提供する。
【解決手段】自車1の走行形態が一時的に対向車線にはみ出した走行形態であるか否かを判断する走行形態判断手段7を備える。接触可能性判断手段9は、走行形態判断手段7の判断結果が肯定的である場合に、否定的である場合よりも、自車1の進行方向前方の領域で物体検出手段2により検出される物体と自車1との接触可能性が有るか否かの判断結果が肯定的な判断結果となるのを抑制する。
(もっと読む)
2,001 - 2,020 / 5,473
[ Back to top ]