
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
61 - 80 / 5,473
生体状態判定装置
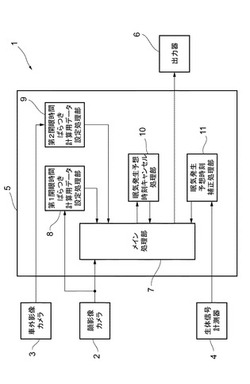
【課題】ドライバのぼんやり状態の判定精度を向上させることができる生体状態判定装置を提供する。
【解決手段】生体状態判定装置1は、ドライバの顔を撮像する顔撮像カメラ2と、車両の外側(前方)を撮像する車外撮像カメラ3と、ECU5とを備えている。ECU5は、顔撮像カメラ2の撮像画像に基づいてドライバの開眼時間を取得し、その開眼時間のばらつきを計算し、ドライバのぼんやり状態を検知するメイン処理部7と、顔撮像カメラ2の撮像画像に基づいてドライバの眼への外乱入力を検出し、開眼時間ばらつきを計算するための単位時間幅を設定する第1開眼時間ばらつき計算用データ設定処理部8と、車外撮像カメラ3の撮像画像に基づいて車外環境を検出し、開眼時間ばらつきを計算するための単位時間幅を設定する第2開眼時間ばらつき計算用データ設定処理部9とを有している。
(もっと読む)
車両周囲監視装置

【課題】本発明は、車外の人に対する警告を、人の顔向きで判断し、自車両の方を向いているか否かの判断を行い、自車両の方を向いていない場合のみ、注意喚起を行うことができる車両周囲監視装置を提供する。
【解決手段】人感知手段4は、撮像手段1で撮像した画像と人感知パターン記憶手段8の人感知パターンを比較して、車両周囲に人が存在するかどうかを確認する。人感知手段4が人を感知した場合、顔検知手段5が人の顔向きを判断し、車両周囲の人の両目を検知しない場合のみ、警告出力手段6により車両周囲の人へ注意喚起を行う。
(もっと読む)
障害物検出装置、及び障害物検出方法
【課題】道路遠方の障害物の検出ができ、障害物を検出する処理で必要とされる記憶領域の容量を抑えて処理負荷の軽減を図ることが可能な技術を提供する。
【解決手段】車両から撮影された画像から、該車両が走行する道路の領域としての画像領域を抽出し、抽出された画像領域における遠方領域を拡大して拡大画像を生成し、生成された拡大画像を記憶し、記憶された時間的に前後する拡大画像を比較するため、車両の速度に関する速度情報に基づいて車両の移動距離を算出し、時間的に前の拡大画像を該移動距離に応じた変換拡大画像に変換し、拡大画像と変換された変換拡大画像とを比較して両画像の異なる点を障害物として検出し、検出した検出結果を出力する。
(もっと読む)
監視業務支援システム
【課題】有料道路の複数の料金所の車線の監視業務を支援すること。
【解決手段】車線に関する詳細な情報を収集するための情報収集手段を具備する複数の車線設備170と、各料金所にそれぞれ設置された装置であって、当該料金所の車線に設置されている車線設備170と通信接続された複数の料金所装置150と、料金所とは異なる監視所に設置された装置であって、各料金所装置150と通信接続され得る状態にあり、監視員によって選択された車線に関する詳細な情報を個別に表示するための表示手段131を具備し、監視員によって選択された車線の監視処理を行う複数の個別対応装置130と、監視所に設置された装置であって、各料金所装置150及び各個別対応装置130と通信接続され、全車線の車線に関する簡略な情報を集約して表示するための表示手段111を具備し、全車線の簡略な監視処理を行う集約対応装置110とを備える。
(もっと読む)
駐車検出装置、駐車検出方法および駐車検出プログラム
【課題】高速道路のサービスエリアなど、多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムを提供する。
【解決手段】本発明の駐車検出装置1は、複数の駐車マスを含む駐車検出対象エリアの画像を撮影する撮影手段(カメラ10)と、所定の画像処理を施す画像処理手段(エッジ抽出処理部24)と、駐車検出対象エリアの画像に所定の画像処理を施した判定対象データ(エッジ抽出処理画像データ23c)と、予め駐車マス毎に設定された判定の基準となる判定基準データ23dと、を比較して車両の有無を判定する判定手段(相関率算出部25、相関率判定処理部26)と、を備え、判定基準データは、表示パターンが撮影された駐車検出対象エリアの画像から取得した表示パターンを含む画像領域に所定の画像処理を施したデータであることを特徴とする。
(もっと読む)
前方確認アシスト装置および前方画像への切り替え方法
【課題】ナビゲーション画像等から前方画像への表示切り替えが交差点進入時以外の無用なタイミングでは行われないようにすることが可能な「前方確認アシスト装置および前方画像への切り替え方法」を提供する。
【解決手段】車両の速度や減速加速度ではなく、ブレーキの踏み込み強度および踏み込み積算時間に基づいて、車載カメラ102により撮影された前方画像への表示の切り替えを制御することにより、渋滞時のノロノロ運転等により単に車両の速度が所定速度以下になったり、一時的に減速されたりしただけの状況では、前方画像への表示の切り替えは行われず、ブレーキの踏み込み強度や踏み込み積算時間により表わされるブレーキの踏み込み状況から、運転者が車両を停止させようとしていると推測されるときにだけ、ディスプレイ104の表示が前方画像へと切り替わるようにする。
(もっと読む)
白線認識装置
【課題】自車両にピッチングが生じても白線を正確に認識できる白線認識装置を提供すること。
【解決手段】自車両の前方の道路を含む領域の画像を撮影する撮影手段3と、前記撮影手段3により撮影される画像の1フレームごとに、道路における白線のエッジを抽出するエッジ抽出手段7と、前記エッジ抽出手段7により抽出された前記白線のエッジを、前記1フレームごとに順次記録し、前記白線のエッジの履歴を作成する履歴作成手段7と、前記白線のエッジの履歴を用いて、前記白線を認識する白線認識手段7と、前記自車両のピッチングを検出するピッチング検出手段7とを備え、前記履歴作成手段7は、前記ピッチングが検出されたときに撮影されたフレームにおける前記白線のエッジは、前記履歴に含めないことを特徴とする白線認識装置1。
(もっと読む)
区画線認識システム、区画線認識方法、及び区画線認識プログラム
【課題】路面上の区画線を高精度に認識すること。
【解決手段】区画線認識システムは、自車の車速を検出する車速検出手段と、自車のヨーレートを検出するヨーレート検出手段と、路面の原画像を入力する画像入力手段と、複数の異なる時刻における原画像に基づいて合成鳥瞰画像を生成し、合成鳥瞰画像に、合成鳥瞰画像を生成したときの車速とヨーレートとを関連付ける合成鳥瞰画像生成手段と、原画像および合成鳥瞰画像のうち少なくとも一方から、区画線候補を検出する区画線候補検出手段と、合成鳥瞰画像と関連付けられた車速およびヨーレートとに基づいて、車両の直進区間を抽出し、直線区間毎に区画線候補を認識し、認識した区画線候補が区画線として適しているか否かを検定する区画線候補検定手段と、を備えている。
(もっと読む)
点灯色識別装置及びプログラム
【課題】撮像画像が表わしている信号灯の点灯色を精度よく識別することができるようにする。
【解決手段】候補領域抽出部24によって、前方画像から、信号灯の候補領域を繰り返し抽出すると共に、追跡部26によって、対応する信号灯の候補領域を追跡する。切替判定部28によって、追跡された信号灯の候補領域の位置の変化から、点灯色の切り替わりを判定し、点灯色が切り替わったと判定された場合、点灯色が切り替わったときの信号灯の候補領域の位置及び色の変化が、点灯規則に沿った変化であるか否かを判定する。点灯色識別部30によって、信号灯の候補領域の位置及び色の変化が、点灯規則に沿った変化でないと判定された場合、点灯規則に沿って変化したときの点灯色を、信号灯の候補領域の点灯色として識別する。
(もっと読む)
ドライブレコーダとして機能する携帯電話機、プログラム及びドライブレコード方法
【課題】新たにドライブレコーダ専用装置を必要とすることなく、既存の携帯電話機をドライブレコーダとして機能させることができる携帯電話機等を提供する。
【解決手段】カメラ部及び加速度センサを有し、車輌の走行中又は停車中におけるドライブレコーダとして用いる携帯電話機であって、当該携帯電話機で実行されるドライブレコードアプリケーションは、車輌外内の映像を連続的に撮影するべく、カメラ部を制御するカメラ制御手段と、カメラ部によって撮影された映像を、所定時間範囲のみ、連続的に先入れ先出し方式で録画する映像録画手段と、加速度センサによって計測された加速度データが、当該車輌の急激な衝撃に基づく所定閾値以上となったか否かを検知する衝撃検知手段と、衝撃検知手段によって検知された衝撃時点における前後の映像を、映像録画手段から取得して保存する映像保存手段とを有する。
(もっと読む)
運転支援装置
【課題】駐車の際における障害物の警告を高精度に実行したい。
【解決手段】生成部22は、車両に設置された少なくともひとつの撮像装置によって撮像された画像をもとに、車両周辺の鳥瞰図画像を生成する。予想軌跡記憶部30は、鳥瞰図画像に対応すべき車両の予想軌跡であって、車両のハンドルを操作して車両を移動させる場合の予想軌跡を記憶する。合成部32は、予想軌跡を鳥瞰図画像に重畳して表示させる。設定部38は、鳥瞰図画像に対して、予想軌跡をもとに障害物の検出領域を設定する。警告部36は、設定した検出領域内の障害物を検出した場合に、その旨を警告する。
(もっと読む)
車載画像処理装置
【課題】人や車両など種類が多く且つそれらを組み合わせたシーンに対応する処理を複数の処理ユニットに適切に行わせることができる車載画像処理装置を提供すること。
【解決手段】車載画像処理装置は、複数の処理ユニット40によって画像処理された処理結果に基づいて、各処理ユニット40の次回に実行する画像処理の種類と優先度を示すタグ情報を生成し、前回の画像処理時に生成されたタグ情報を用いて各処理ユニット40で画像処理を行わせるか否かを判定する。
(もっと読む)
車両用注意喚起装置
【課題】対向右折車両の運転者に対し、自車両の死角に後続直進車両が存在することを報知することで、対向右折車両と後続直進車両の衝突事故を防ぐ車両用注意喚起装置の提供。
【解決手段】自車両の周囲に存在する他車両を検出する他車両検出手段と、第1他車両および第2他車両の運転者が自車両により形成される死角によって相互に相手他車両を視認できないために当該第1他車両と当該第2他車両が衝突する危険性がある状況を、上記他車両検出手段の出力に基づき検出する危険状況検出手段と、上記危険状況検出手段により上記状況が検出された場合、上記第1他車両および上記第2他車両の少なくともいずれか一方の運転者に対し、相手他車両の存在を報知する報知手段とを備える。
(もっと読む)
白線認識装置
【課題】白線を正しく認識できる白線認識装置1を提供すること。
【解決手段】自車両の前方の道路を含む領域の画像を撮影する撮影手段3と、前記画像における道路の領域の輝度を検出する輝度検出手段7と、前記輝度検出手段7で検出した輝度と閾値との対比結果に基づき、前記画像における道路の白線を認識する白線認識手段7と、前記白線認識手段7により認識された白線内における輝度に基づき、前記閾値を再設定する閾値再設定手段7と、を備えることを特徴とする白線認識装置1。
(もっと読む)
自動運転装置
【課題】 自車両の自動運転を行うにあたり、自車両の周囲における交通環境に応じた走行制御を行うことにより、自車両の周囲における交通環境の妨げを防止することができる自動運転装置を提供する。
【解決手段】 自動運転装置における自動制御ECU1は、走行中の道路に対して道なりに走行させる自動運転制御を行うにあたり、自車両が走行する車線の状態を検出し、検出した車線の状態に基づいて、自動運転制御を行う。たとえば、自車両が走行する道路に自車走行車線が道なり走行可能である道なり車線があるにも係わらず、自車両が道なり車線でない車線を走行している場合には、自車両を道なり車線に移動させる進路を生成する。また、自車両が走行する道路に道なり車線が複数ある場合には、道なり走行に好適となる道なり車線に自車両を移動させる進路を生成する。
(もっと読む)
撮像装置および料金収受システム
【課題】フロントガラス角度の異なる車両に対しても、太陽光等によるフロントガラスの反射光の影響を低減して、車両内の運転者などの人物を高画質な静止画として撮像できる撮像装置を提供する。
【解決手段】撮像エリア内の任意の車両位置における任意の角度のフロントガラスからの反射光を最小に抑えるために、設置位置および撮像面側に装着する偏光フィルタの偏光角を最適化した複数のカメラを設け、車両のフロントガラス角度および車両位置を測定し、測定したフロントガラス角度に基づき複数のカメラの中から車両のフロントガラス角度に最適なカメラを選択するとともに、当該選択したカメラに対する最適な撮像位置を決定し、測定された車両位置が決定された最適な撮像位置に到達した際に、選択された最適なカメラから静止画を取得する。
(もっと読む)
運転支援装置
【課題】運転者に対して、駐車開始を実行する際の位置合わせの精度を向上させるための情報を提供したい。
【解決手段】生成部22は、車両に設置された少なくともひとつの撮像装置によって撮像された画像をもとに、車両周辺の鳥瞰図画像を生成する。予想軌跡記憶部30は、鳥瞰図画像に対応すべき車両の予想軌跡であって、車両のハンドルを操作して車両を移動させる場合の予想軌跡をハンドルの舵角を変えながら複数記憶する。合成部32は、予想軌跡記憶部30において記憶した複数の予想軌跡を鳥瞰図画像に重畳して表示する。
(もっと読む)
ふらつき判定装置
【課題】周辺車両の検出範囲を狭めることなく、周辺車両のふらつき判定の精度を高めることが可能なふらつき判定装置を提供する。
【解決手段】本発明の一実施形態に係るふらつき判定装置70は、第1の検出手段20によって検出された周辺車両の第1の位置情報(距離、横位置)を求める第1の演算手段20と、第1の検出手段20と異なる検出原理を用いる第2の検出手段30によって検出された周辺車両の第2の位置情報(距離、横位置)を求める第2の演算手段30と、第1及び第2の位置情報を融合して周辺車両の融合位置情報(距離、横位置)を求める融合演算手段74と、周辺車両の存在位置に基づいて、第1及び第2の位置情報、並びに融合位置情報のうちの何れかを選択する選択手段75と、選択された位置情報(距離、横位置)の時間的変動に基づいて周辺車両のふらつき判定を行う判定手段76とを備える。
(もっと読む)
車両制御装置
【課題】ドライバの走行特性に合致した逸脱判定を行うことが可能な車両制御装置を提供する。
【解決手段】車両制御装置1では、走行軌跡情報取得センサ2によって、車両10と該車両10の一側方側における認識可能な白線Lとの間の距離Xが検出される。そして、ECU5により、距離Xの平均値μ及び分散値σに基づいて、車両10が一側方側と反対の他側方側に移動した際の車両10の逸脱判定が行われる。これにより、車両制御装置1によれば、ドライバの走行軌跡の特徴を逸脱判定に好適に反映させることができる。
(もっと読む)
車載装置、報知方法、車両照合システム及びコンピュータプログラム
【課題】捜索対象の車両を照合するために撮像装置が搭載された車両の運転者の労力を低減すること。
【解決手段】車載装置であって、車両に搭載された撮像装置によって撮像された車両の画像から、車両の車種が、捜索対象の車両と同車種であるか否か判定する車種判定部と、撮像装置によって撮像された車両の画像から、車両のナンバーが、捜索対象の車両のナンバーと一致するか否か判定するナンバー判定部と、車種判定部による判定結果に応じて第一報知態様で報知を行い、ナンバー判定部による判定結果に応じて第一報知態様とは異なる第二報知態様で報知を行う報知部と、を備える。
(もっと読む)
61 - 80 / 5,473
[ Back to top ]