
Fターム[5H180CC12]の内容
Fターム[5H180CC12]に分類される特許
21 - 40 / 4,855
運転支援装置
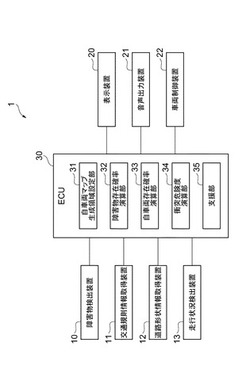
【課題】自車両周辺の移動体の将来の移動状態を高精度に予測する運転支援装置を提供することを課題とする。
【解決手段】自車両周辺の移動体の将来の移動状態を予測し、当該将来の移動状態に基づいて運転支援を行う運転支援装置1であって、移動体の現在の移動状態を取得する移動状態取得手段10と、取得した移動体の現在の移動状態に基づいて移動体の将来の移動状態を予測する移動状態予測手段32と、移動体周辺の交通規則情報を取得する交通規則情報取得手段11を備え、移動状態予測手段32は、取得した交通規則情報を用いて移動体の将来の移動状態を予測することを特徴とする。
(もっと読む)
運転支援システム

【課題】車両の運転者に違和感を与えることを抑制しつつ、運転支援を行う。
【解決手段】運転支援システム(10)は、車両(1)に搭載され、運転者の運転操作を支援する。運転支援システムは、種別における特徴点のバラツキに基づいて、一の種別に対する特徴点のバラツキの程度や、複数の種別に対する特徴点のバラツキの相関性を考慮して、運転支援の実施可否や、支援方法を決定する。ここで、運転支援システムは、車両が、当該運転支援システムが対象とするエリアに進入した際に、前記エリア内における複数の種別の各々に対応する特徴点を記録すると共に、記録された特徴点に基づいて記録された特徴点のバラツキの程度を複数の種別毎に示すバラツキマップを生成する。
(もっと読む)
ふらつき判定装置
【課題】周辺車両の検出範囲を狭めることなく、周辺車両のふらつき判定の精度を高めることが可能なふらつき判定装置を提供する。
【解決手段】本発明の一実施形態に係るふらつき判定装置70は、第1の検出手段20によって検出された周辺車両の第1の位置情報(距離、横位置)を求める第1の演算手段20と、第1の検出手段20と異なる検出原理を用いる第2の検出手段30によって検出された周辺車両の第2の位置情報(距離、横位置)を求める第2の演算手段30と、第1及び第2の位置情報を融合して周辺車両の融合位置情報(距離、横位置)を求める融合演算手段74と、周辺車両の存在位置に基づいて、第1及び第2の位置情報、並びに融合位置情報のうちの何れかを選択する選択手段75と、選択された位置情報(距離、横位置)の時間的変動に基づいて周辺車両のふらつき判定を行う判定手段76とを備える。
(もっと読む)
日照情報収集システムおよび日照情報送信機
【課題】透明板に映像を投影する技術において、透明板に映像を投影しない場合における透明板越しの視認性を向上することを目的とする。
【解決手段】複数の日照情報送信機5が道路1〜4に沿って間隔を空けて設置され、これら複数の日照情報送信機5が、当該日照情報送信機5に備えられる太陽電池の発電量に基づいて日照情報を作成して送信し、それら日照情報をセンタ6が受信、記録、および送信し、車両7のナビゲーション装置20がその日照情報を受信し、ユーザに表示する。
(もっと読む)
電磁波検知装置、携帯機器、電気自動車及びハイブリッド車の判定方法並びにプログラム
【課題】高価なインフラ設備を必要とすることなく、電気自動車及びハイブリッド車の接近を報知することができる電磁波検知装置、携帯機器、電気自動車及びハイブリッド車の判定方法並びにプログラムを提供すること。
【解決手段】電磁波検知装置100は、車両から発生する電磁波を検知するアンテナ/センサ部110、第1の演算処理部120、及び判定部140を備える。周波数解析部123は、アンテナ/センサ部110からの出力信号にフィルタ部121で帯域制限し、AD変換部122でアナログ・デジタル変換した信号に対して、電気自動車及びハイブリッド車のモータ又はインバータに起因する特有の周波数成分のスペクトルが含まれることを解析する。判定部140は、第1の演算処理部120の演算処理結果に基づいて、電磁波の発生主体が電気自動車及びハイブリッド車か、それ以外の車両であるかを判定する。
(もっと読む)
地図情報システム、端末装置、サーバ装置およびプログラム
【課題】従来の地図情報システムにおいては、ユーザが提供する地図を利用して、地図情報サービスを提供したり、経路案内を行ったりできなかった。
【解決手段】1以上の第一端末装置のユーザが、自身で作成したり、準備したりした手書きの地図や、イラスト地図などの地図をサーバ装置に登録し、1以上の第二端末装置のユーザが利用できる地図情報システムであり、当該地図にランドマーク等のオブジェクトの情報である地理情報を付与できる地図情報システムにより、ユーザが提供する地図を利用して、地図情報サービスを提供したり、経路案内を行ったりできる。
(もっと読む)
探索情報提供システム、サーバ装置、探索情報提供装置、探索情報提供方法、および、プログラム
【課題】データベースに蓄積された経路探索結果を利用して商圏分析等の分析を行うことができる、探索情報提供システム、サーバ装置、探索情報提供装置、探索情報提供方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、各地点に関連付けた交通網を規定するネットワークデータに基づいて算出した、経路探索条件を満たす経路探索結果を記憶し、入力部を介して地点に関する地点情報を少なくとも含む分析要求を利用者に入力させ、分析要求に基づいて地点情報の地点に到達する経路探索結果を抽出することにより、探索情報を生成し出力部を介して出力させる。
(もっと読む)
データ通信処理装置
【課題】高額な通信使用料が発生する事態を回避できるとともに、処理を中断することなく、所望の情報を継続して取得できるデータ通信処理装置を提供する。
【解決手段】情報配信サーバ12からネットワーク11を介して所望の情報を取得する通信手段24と、取得した情報を記憶する情報記憶手段21と、情報を取得するための通信使用料を累計する通信使用料累計手段(制御手段13)と、通信使用料の限度額を設定する限度額設定手段(入力手段25)と、通信使用料が限度額に達しているか否かを判定する使用料判定手段20と、通信使用料が限度額に達していると判定された場合、通信手段24による情報配信サーバ12へのアクセスを禁止するアクセス禁止手段(制御手段13)と、前記情報配信サーバへのアクセスが禁止されると情報記憶手段21に記憶されている情報を検索する情報検索手段19と、処理結果を出力する出力手段26を備える。
(もっと読む)
移動体検知システム及び移動体検知表示装置
【課題】車両等の移動体を検知する移動体検知システムにおいて、移動体に適切な移動方向を指示する。
【解決手段】車両等の移動体を検知する移動体検知システムにおいて、移動体検知手段(例えば、ミリ波レーダ装置)が検知範囲に存在する移動体を検知し、進行方向決定手段が前記移動体検知手段により検知された移動体に対して表示する進行方向を決定し、表示手段が前記移動体検知手段により検知された移動体に対して前記進行方向決定手段により決定された進行方向の情報(例えば、移動体を誘導するための矢印の情報)を表示する。
(もっと読む)
情報提供システム及び車載装置
【課題】搭乗者等の情報提供先の利便性及び快適性を向上させることができる情報提供システム及び車載装置を提供する。
【解決手段】車両に乗車している搭乗者に係る行動履歴情報を収集する行動履歴情報収集部121と、この行動履歴情報を搭乗者の地域的特徴情報に対応付けて行動履歴データベース221aとして管理する履歴情報管理部221と、情報提供先に関する地域的特徴情報に基づいて、行動履歴データベース221aから、情報提供先に提供する提供情報を抽出する提供情報抽出部222と、提供情報を情報提供先に対して提示する提供情報提示部122とをそなえるように構成する。
(もっと読む)
データ通信処理装置
【課題】高額な通信使用料が発生する事態を回避できるデータ通信処理装置を提供する。
【解決手段】スケジュールを記憶するスケジュール記憶手段28と、情報配信サーバ12から情報を取得する通信手段24と、情報を記憶する情報記憶手段21と、通信使用料を累計する制御手段13と、スケジュールが登録されているか否かを判定する制御手段13と、スケジュールが登録されていると判定された場合、累計された通信使用料と設定した限度額との差額が所定値以下であるか否かを判定する差額判定手段20と、差額が所定値以下であると判定された場合、通信手段24による情報配信サーバへ12のアクセスを禁止するアクセス禁止手段(制御手段13)と、前記アクセス禁止手段により前記情報配信サーバへのアクセスが禁止されると情報記憶手段21に記憶されている情報を検索する情報検索手段19と、情報の処理結果を出力する出力手段25とを備える。
(もっと読む)
減速支援装置
【課題】自車前方に複数台の先行車が存在する場合にも、停止する前の早い段階で自車の減速支援を可能とする減速支援装置を提供する。
【解決手段】自車M0が備える減速支援装置は、自車M0前方の第1車群Z1に関して路側システム101から得られる第1車群Z1の情報と、自車M0に搭載される先行車検知センサやナビゲーション装置等の検知情報に基づいて得られる第2車群Z2の情報と、第1及び第2車群Z1,Z2の前方にある信号機111の信号サイクル情報と、に基づいて、第1又は第2車群Z1,Z2に属する車両M1〜M7のうち信号機111で停止する停止車両群を予測し、停止した場合の停止車両群の後端の位置を自車M0の目標停止位置の基準にして、自車M0の減速支援制御を行う。
(もっと読む)
車両用外界認識装置
【課題】パターンマッチにより歩行者を検知する際に、電柱,ガードレール,路面ペイント等の人工物に対する誤検知を、少ない処理負荷で低減することができる車両用外界認識装置を提供する。
【解決手段】自車前方を撮像した画像を取得する画像取得部(1011)と、その画像から歩行者を検出する処理領域を設定する処理領域設定部(1021)と、その画像から歩行者の有無を判定する歩行者候補領域を設定する歩行者候補設定部(1031)と、歩行者候補領域内の所定方向の濃淡変化量の割合に応じて歩行者候補領域が歩行者であるか人工物であるかを判定する歩行者判定部(1041)と、を備える。
(もっと読む)
車両制御装置
【課題】妥当性が高い自車両のリスクポテンシャルの算出を可能とする車両制御装置を提供する。
【解決手段】車両制御装置1は、自車両の走行環境を認識する走行環境認識部21と、自車両周辺の障害物を認識する障害物認識部23と、車両と障害物との衝突事故に関する過失割合情報データベース15aを格納するDB記憶部15と、走行環境認識手段21で得られる走行環境と、障害物認識手段23で得られる障害物の状態と、DB記憶部15を参照して得られる過失割合情報と、に基づいて、自車両と障害物との衝突事故が発生したと想定した場合における自車両の想定過失割合を算出する想定過失割合算出部25と、を備え、想定過失割合が高いほど、障害物との関係におけるリスクポテンシャルを高く算出する。
(もっと読む)
運転支援装置
【課題】自車両と他車両との衝突可能性判定の精度を上げることができ、自車両の走行している道路と平行な道路を走行する他車両が衝突する可能性があると誤判定することを防ぐことができる運転支援装置を実現する。
【解決手段】自車両情報取得手段と、他車両情報取得手段と、衝突可能性判定手段を備える運転支援装置において、前記衝突可能性判定手段は、自車両の位置と他車両の位置との間の直線距離と、自車両の位置と他車両の位置とを結ぶ直線と他車両の位置から他車両の進行方位へ伸ばした直線とがなす角度とを用いて、他車両の位置から他車両の進行方位へ伸ばした直線と自車両位置との間の最短距離を算出し、この最短距離が予め設定された距離未満である時に自車両と他車両とが衝突する可能性があると判定する。
(もっと読む)
車載用電子機器及びプログラム
【課題】安価なカメラであっても、比較的確実に車間距離に基づく制御を行うことのできる車載用電子機器を提供する。
【解決手段】 ナンバープレートは、装着する車両の種別(大型/中型/小型)により、縦横比及びサイズが異なる。ナンバープレートを撮影した場合、同じサイズのナンバープレートであれば、ナンバープレートまでの距離が近いほど、大きく映る。そこで制御部は、車外撮影カメラから受け取った映像データから、その映像データ中に、ナンバープレートが存在する場合には、当該ナンバープレートのサイズ及び縦横比を求め、その縦横比とサイズに対応する自車両からそのナンバープレートを有する車両までの距離との関係をデータベースから読み出し、これに基づいて自車両からそのナンバープレートを有する車両までの車間距離を求め、その車間距離を車間距離表示部に表示する。
(もっと読む)
車両接近報知装置
【課題】不要な警報の発生を抑えること。
【解決手段】車両接近報知装置1は、車両周辺に位置する報知候補を検出する報知候補認識部11と、検出された報知候補と車両とが衝突する危険度(衝突確率)を算出する衝突確率算出部13と、算出された危険度に基づいて、報知候補に警報を発するか否かを判定する警報判定部14と、その判定結果に基づいて警報を発すると共に、警報を中止するための入力があった場合には警報を中止する警報制御部19と、を備える。
(もっと読む)
車載用電子機器
【課題】車両からの電源供給線を接続することなく、完全にコードレスで使用でき、例えば、待受け画面を常時表示させることができるなど、機能に制限をかけることもなく、年間を通じてソーラー充電のみでの完全使用することができる車載用電子機器を提供する。
【解決手段】表示部5は1.4インチの画素メモリ液晶であり、ケース本体1のユーザ側を表示面としている。表示部5には、メモリ液晶を照明するフロントライトを備え、フロントライトは、ソーラーパネルの起電力の状態に基づいて点灯と非点灯とを切り替える構成としている。本レーダー探知機の内部には、充電式のバッテリーを備え、ソーラーパネルから給電を受けて充電を行うとともに、制御部18、GPS受信機8、マイクロ波受信機4、無線受信機15、リモコン受信器16、表示部5、ランプ6、スピーカ20、メモリカードリーダ13、赤外線受信機7等の各部への電源供給を行う。
(もっと読む)
リスク回避支援装置
【課題】自車両と周囲車両との衝突を確実に回避することができるリスク回避支援装置を提供する。
【解決手段】 リスク回避支援装置のECUは、自車両と先行車両及び後続車両との車間距離、先行車両及び後続車両の走行挙動(ふらつき等)に基づいて、自車両が先行車両に追突するリスク(前衝突リスク)と自車両が後続車両に追突されるリスク(後衝突リスク)を演算し、これらの衝突リスクが等しくなるように、先行車両及び後続車両に対する自車両の車間位置を求め、これに応じてアクセル制御部8及びブレーキ制御部9を制御する。また、ECUは、先行車両の走行挙動に基づいて、自車両が先行車両を追い越すリスク(追越リスク)を演算し、この追越リスクが前衝突リスクよりも低いときに、自車両が先行車両を追い越すようにアクセル制御部8及びステアリング制御部10を制御する。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
21 - 40 / 4,855
[ Back to top ]