
Fターム[5H180CC30]の内容
Fターム[5H180CC30]に分類される特許
1 - 20 / 186
ドライブレコーダ及びドライブレコーダの感度補正方法
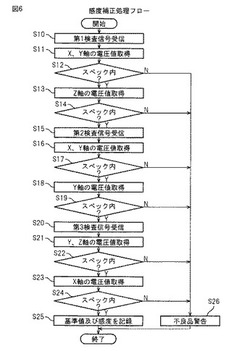
【課題】加速度センサの感度バラツキを補正し、検知精度の固体差をなくすことが可能なドライブレコーダ及びドライブレコーダの感度補正方法を提供することを目的とする。
【解決手段】車両(1)に印加される加速度に応じた加速度出力を行う加速度センサ(5)と、加速度出力に基づいて加速度を算出する制御部(24)を有し、制御部は、加速度センサの重力加速度による加速度出力に基づいて加速度出力から加速度を算出する感度を補正することを特徴とするドライブレコーダ(2)及びドライブレコーダの感度補正方法。
(もっと読む)
レーダ装置

【課題】レーダビームの上下方向の軸ずれ量を算出することができるレーダ装置を提供する。
【解決手段】レーダ装置1は、レーダ3と、このレーダ3が接続されたECU2とを備えている。ECU2は、レーダ3によって検出された自車両の上方又は下方の正面に存在する物標の中から静止構造物を検出する。そして、ECU2は、検出された静止構造物Tの自車両Mに対する相対的な移動方向と自車両の進行方向とが成す上下方向の角度に基づいて、自車両の上下方向に対するレーダビームのずれ角Δθ(軸ずれ量)を算出する。
(もっと読む)
荷重計測装置
【課題】車両通過時に路面埋設物に加わる水平方向の力を検出することができる荷重計測装置を提供することにある。
【解決手段】車両が走行する路面に埋設された路面埋設物を有し、路面埋設物に加わる荷重を計測する荷重計測装置であって、路面に埋め込まれて固定され、鉛直方向上側の面が開放された筐体と、板状部材であり、面積が広い面が鉛直方向上面と鉛直方向下面側となるように、筐体の内側に移動自在な状態で配置された路面埋設物と、路面埋設物の鉛直方向下側の面と筐体との間に配置された潤滑手段と、路面埋設物の側面と筐体との間に配置され、路面埋設物に加わる水平方向の荷重を検出する荷重検出手段とを有することで上記課題を解決する。
(もっと読む)
車両検出装置及び車両検出方法
【課題】遠赤外線方式のセンサを利用した車両検出を精度良く行うこと。
【解決手段】感知信号レベルと路面レベルとのレベル差が所定のレベル差閾値ΔV以上であるか否かによって車両の有無を検出する。このときのレベル差閾値ΔVを、感知環境に応じて変更する。具体的には、晴天時にはレベル差閾値ΔVを基準値αから増加量βだけ増加させて「α+β」とし、曇天時にはレベル差閾値ΔVを基準値αとし、雨天時にはレベル差閾値ΔVを基準値αから減少量γだけ減少させて「α−γ」とする。また、感知環境は、「車両有り」と検出した期間の感知信号の正負及びレベルをもとに判断する。
(もっと読む)
路側固定物検出装置
【課題】車両に搭載され、該車両側方の路側固定物を精度良く検出可能なガードレール検出装置を提供する。
【解決手段】距離画像センサにより、車両側方の判定対象物の距離画像を取得するとともに、車両の幅方向の走行位置に応じてテンプレート距離画像を生成し(ステップS5の処理を実行して)、該生成したテンプレート距離画像と該取得した距離画像とのマッチング度を算出し、該算出したマッチング度を基に判定対象物がガードレールか否かを判定する(ステップS11乃至ステップS13の処理を実行する)ようにした。
(もっと読む)
車両感知システム
【課題】路面に積雪がある場合のように入力レベルが背景レベルまで戻りにくい状況が生じても、感知ON時間が長くなりすぎるのを防止する。
【解決手段】道路R上の監視領域Aの温度を検出する検出部2から得られた入力レベルと、道路Rの温度レベルに基づく背景レベルと、の差に基づく値を比較値とし、前記比較値と閾値とを比較して車両の有無の判定を行う判定部32と、少なくとも車両有りの判定がされている間において、車両無しの判定をするために用いられる閾値Loの調整を行う閾値調整部34と、を備えている。前記閾値調整部34は、車両無しの判定から車両有りの判定に切り替わってから前記所定時間を経過したことを契機として、閾値Loを増加させる急増処理を実行する。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が、携帯端末を手持ちで歩行している場合であっても、その携帯端末に搭載された地磁気センサのみを用いて、歩行者の進行方向をできる限り正確に決定する携帯端末、プログラム及び方法を提供する。
【解決手段】携帯端末の進行方向決定手段は、複数の加速度ベクトルから重力方向の重力ベクトルを導出し、且つ、該重力ベクトルに対応する地磁気ベクトルを選択する基準ベクトル導出手段と、記重力ベクトルと地磁気ベクトルからなる方位基準面の法線ベクトルを導出する方位基準面導出手段と、複数の加速度ベクトルから加速度面の法線ベクトルを近似的に算出する加速度面算出手段と、方位基準面と加速度面の両平面の法線ベクトルのなす角を方向角として算出する方向角算出手段とを有する。
(もっと読む)
携帯電子機器
【課題】キャリブレーション処理を正確に行える2軸式地磁気センサを搭載した携帯電子機器を提供する。
【解決手段】地磁気を検出する2軸の地磁気センサ(110)と、地磁気センサによって検出される地磁気に基づいて、方位測定のためのキャリブレーションデータを取得するキャリブレーションデータ取得部(121)と、キャリブレーションデータが取得されているときに、地磁気センサ以外の複数の機能のうち少なくとも1つの機能が実行中である場合、キャリブレーションデータ取得部で取得されたキャリブレションデータを破棄するようキャリブレーションデータ取得部(120)を制御するキャリブレーションデータ取得制御部(124,120)とを備えることを特徴とする携帯電子機器(110)を提供する。
(もっと読む)
車線位置検知システム
【課題】種々の道路状況・道路環境に応じて自動的に最適な白線検知処理を行うことが可能な車線位置検知システムを提供すること。
【解決手段】本発明に係る車線位置検知システム20は、車載カメラ21で路面を撮像して得られた画像を俯瞰画像に変換し、俯瞰画像の輝度を車両進行方向に平行に積分して進行方向に垂直な方向に対する輝度プロファイルを求め、輝度プロファイルにフィルタ処理を施すことによって白線の位置を検出するシステムである。車線位置検知システム20は、車両に設置されたセンサの情報に基づいて路面状況を判定し、判定された路面状況に基づいて、フィルタ処理に用いられるフィルタの遮断周波数の高低を変更する。
(もっと読む)
標定装置、標定方法および標定プログラム
【課題】車両の位置姿勢を標定できるようにする。
【解決手段】消失点抽出部120は、画像センサ104により車両から撮像された画像204に基づいて画像204に映っている白線の消失点実測値205を算出する。航法演算部110は、慣性センサ101とオドメトリ102とにより計測された角速度201と速度202とに基づいて車両の自己姿勢角207と自己位置206とを計測する。データベース検索部130は自己位置206と自己姿勢角207とに基づいて画像204に映っている白線の白線座標203を取得する。消失点計算部140は白線座標203と自己姿勢角207とに基づいて消失点予測値208を算出する。カルマンフィルタ部160は消失点実測値205と消失点予測値208との差分である消失点残差209に基づいて姿勢誤差推定量210を算出する。そして、航法演算部110は自己姿勢角207を姿勢誤差推定量210により補正する。
(もっと読む)
路面標示画像処理装置、路面標示画像処理方法並びに路面標示画像処理プログラム
【課題】路面標示の一部に影が重畳しているような状況においても、輝度画像などを用いる場合よりも良好に路面標示を認識できる路面標示認識装置を提供する。
【解決手段】日陰に差し込む光は、日向に比べ青系の光の占める割合が多いという特徴がある。そこで、青成分強度画像生成モジュール103はカラー画像取得モジュール101が出力するカラー画像から青成分の強さを表す青成分強度画像を生成し、日陰補正画像生成モジュール104は前記青成分強度画像を輝度画像に加算する。これにより、輝度画像を用いる場合に比べ、日陰の路面標示に対応する画素の値が、日向の舗装道路面に対応する画素の値に比べ大きくなるようになり、画像全体において路面標示および舗装道路面に対応する画素の値が2つに分離するようになり、高精度に路面標示を認識できるようになる。
(もっと読む)
GPS測位装置及びGPS測位方法
【課題】GPS受信機側に新旧の衛星情報が混在する場合であっても、適切な測位演算が可能なGPS測位装置及び測位方法を提供することを目的とする。
【解決手段】複数のGPS衛星から定期的に受信した前記複数のGPS衛星の各々の最新の衛星情報を記憶する衛星情報記憶手段と、前記衛星情報記憶手段により記憶された前記複数のGPS衛星の各々の最新の衛星情報に、最新の衛星情報と最新ではない前回受信時の衛星情報が混在して記憶されているか否かを判断する新旧混在判断手段と、前記新旧混在判断手段による判断結果に応じて、当該GPS測位装置の位置座標を測位演算する測位演算手段とを有することを特徴とするGPS測位装置。
(もっと読む)
車両案内システム
【課題】いわゆる「穴場」的人気の施設情報を取得することができるようにする。
【解決手段】車両案内システム1は、カーナビゲーション装置2と、情報センタ3とを含む。カーナビゲーション装置2の制御回路5は、目的地として、施設を設定したときに、該施設固有名と当該施設のジャンル名と自車ナンバープレートの地域名とを関連付けたユーザー情報を情報センタ3にアップロードする。また情報センタ3に対して、地元人気度を含んだ施設情報のダウンロードを要求する。情報センタ3の制御装置3は、前記アップロードされて蓄積されたユーザー情報を当該ジャンルにおける施設固有名と地元人気度とを関係付けて分類し、前記ダウンロード要求があったときに、指定されたジャンルにおける施設固有名と当該施設の地元人気度とを含んだ施設情報をダウンロードする。
(もっと読む)
携帯情報端末、RFID取引端末、位置特定方法および位置特定プログラム
【課題】 本発明は、GPS機能を搭載した携帯情報端末の位置特定に関し、より詳細には携帯情報端末に搭載したRFIDチップを商取引利用した場合に、RFID取引端末からアシストデータが書き込まれ、そのアシストデータを用いて携帯情報端末の位置を特定する携帯情報端末に関するものである。
【解決手順】 本発明の携帯情報端末は、RFID取引端末と商取引が行われた際に、アシストデータとRFID取引端末の設置位置と書込み時刻、GPS衛星電波受信の良否を示す設置環境情報とがRFIDチップに書込まれ、利用者からの測位要求基づいて書込み時刻からの経過時間を求め、経過時間が所定の時間内で設置環境情報がGPS衛星電波受信不良であるとき設置位置を現在位置とし、GPS衛星電波受信良好であるとき、取得したアシストデータを用いてGPS機能により現在位置を算出し表示する、よう構成する。
(もっと読む)
ナビゲーション装置
【課題】車両が旋回走行をしている場合に、算出したピッチ傾斜角の信頼性が低いため、自車位置精度が劣化する。
【解決手段】車両の方位を検出する方位検出手段と、車両の前後方向の加速度を検出する加速度検出手段と、車両の移動距離を検出する移動距離検出手段と、移動距離検出手段の出力に基づいて車両の速度を算出する速度算出手段と、速度算出手段の出力に基づいて車両の加速度を算出する加速度算出手段と、加速度算出手段から出力された車両の加速度と加速度検出手段の出力に基づいて車両のピッチ傾斜角を算出するピッチ傾斜角算出手段と、方位検出手段の出力および速度算出手段で算出された車両の速度に基づいて車両の求心加速度を算出する求心加速度算出手段と、求心加速度算出手段の出力に基づいてピッチ傾斜角算出手段によって算出された車両のピッチ傾斜角の信頼性を判定するピッチ傾斜角信頼性判定手段を備える。
(もっと読む)
車両ナビゲーション装置
【課題】車両現在位置を精度良く表示する。
【解決手段】車両ナビゲーション装置1は、車両の旋回開始・終了が行われると、地図データに基づいて車両現在位置に適合するリンクを車両走行軌跡に基づいた誤差範囲内で探索し、車両現在位置に適合するリンクが存在すると、車両現在位置を当該車両現在位置に適合するリンク上に引込み制御し、この後に、車両が施設内に進入した旨を判定すると、引込み制御した車両現在位置を当該引込み制御する直前の位置に戻して後段の処理を行う。これ以降、引込み制御した直後の車両現在位置を基点とするのではなく引込み制御する直前の車両現在位置を基点として後段の処理を行うことになり、車両現在位置を精度良く表示する。
(もっと読む)
位置算出装置、位置算出プログラム、記録媒体および位置算出方法
【課題】既設のインフラ設備の有効活用を図りつつ、基準位置に対する移動体の位置の算出精度の向上を図ること。
【解決手段】車両に設けられ、路側に設置された光ビーコン102から発信された光信号の受光状態に基づいて、光ビーコン102の通信エリアに対する車両の位置関係の変化を検出する。そして、通信エリアに関する情報Hb,Ld,Lnに基づいて、変化が検出されたタイミングにおける通信エリア内の基準点(X,Y)に対する受光部の位置を算出し、算出された算出結果を出力するようにした。
(もっと読む)
通信システム及び車載機
【課題】自車の走行位置を精度良く特定することができる通信システム及び車載機を提供する。
【解決手段】車載機30が光ビーコン10との通信可能な領域Rに進入した場合、光ビーコン10は、車載機30が領域Rに存在することを送信機20へ通知する。送信機20は、所定の信号を車載機30へ送信する。車載機30は、その信号を受信し、車載機30と送信機20との時刻を同期させる。これにより送信機20と車載機30との間の時刻を一致させる。領域Rを通過した後、道路上の任意の地点で車載機30は、送信機20が送信した信号を受信し、受信した信号の受信時刻及びその信号の送信時刻に基づいて、送信機までの距離を求めることで自車位置を特定する。
(もっと読む)
ナビゲーション装置
【課題】ユーザが現在位置を、マッチング処理されたマッチング位置と誤解することなく容易に把握することを可能にするナビゲーション装置を提供する。
【解決手段】現在位置を特定する現在位置検出手段と、地図記憶手段と、経路探索手段と、前記現在位置を前記地図データ上または前記経路探索手段により探索された経路上にマッチング処理を行うマッチング制御手段と、前記マッチング制御手段においてマッチング処理されたマッチング位置を前記地図データまたは前記経路に合成して表示データを作成する表示制御手段と、前記表示データを表示する表示手段と、を備え、前記表示制御手段は、前記現在位置検出手段によって特定された現在位置とマッチング位置とを、両方とも同一地図上に表示する表示データ、または画面分割によって表示される別々の地図上に別々に表示する表示データ、あるいはユーザの指示に基づき画面を切替えて表示する表示データを作成する。
(もっと読む)
位置検出携帯端末装置、方位決定方法および方位決定プログラム
【課題】装着者の体の向きとしての方位を簡易に決定すること。
【解決手段】磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における地磁気ベクトルの大きさの変化量である地磁気変化量を算出し、算出された地磁気変化量が所定の閾値の範囲内である場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定する。また、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を装着者の方位として採用して決定する。あるいは、最新方位にジャイロセンサによって取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。
(もっと読む)
1 - 20 / 186
[ Back to top ]