
Fターム[5H180FF05]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 位置情報を車外から受信するもの (8,868)
Fターム[5H180FF05]に分類される特許
6,901 - 6,920 / 8,868
ナビゲーション装置およびプログラム
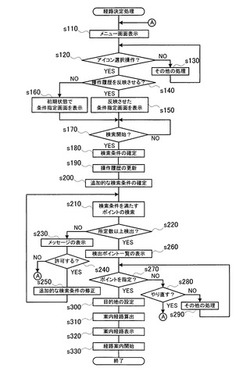
【課題】ナビゲーション装置としての操作性を向上させる。
【解決手段】現在地を中心とする所定範囲内を検索対象とすべき旨が追加的な検索条件として確定され(s200)、この検索条件を満たすポイントが検索される(s210)。そのため、ユーザに指定させる(s260)対象となるポイントは、現在地を中心とする所定範囲内に存在する所在ポイントに限定される。よって、ユーザが検索条件として地域などを指定しなくても、現在地を中心とする所定範囲内,つまり現在地周辺から、ユーザが希望するポイントを目的地として指定させることができる。これにより、ユーザは、検索条件として地域を限定したり、検索結果から現在地周辺のポイントを探し出したり、といったことをしなくても、現在地周辺にのみ存在するポイントの中から希望するポイントを選択することができるようになる結果、ユーザに対する操作の負担を軽減することができる。
(もっと読む)
情報提供装置

【課題】特殊道路入口手前で、必要な情報をユーザに提供する。
【解決手段】自車両の現在位置を取得する現在位置取得手段1と、アクセス可能な地図情報を参照して、現在位置と所定の位置関係にある特殊道路の入口の位置を検出する特殊道路入口検出手段2と、アクセス可能な施設情報を参照して、特殊道路の入口位置と自車両の現在位置との間であって入口位置に最も近い位置にある施設を抽出する施設抽出手段3と、施設抽出手段3により抽出された施設ごとに、ユーザに対する当該施設の情報の必要性を判断し、判断した必要性に応じて施設をユーザに紹介するか否かを決定する紹介要否決定手段4と、その決定結果に基づいて施設の情報を出力する出力手段5とを備えた。
(もっと読む)
航空機進出入路付近の船舶監視システム、及び航空機進出入路付近の船舶監視方法
【課題】 空港の航空機進出入路と船舶航路が交差する場合に、船舶のマスト頂点が航空機進出入路下方限界面に接近するか否かを高い信頼性で監視し得るシステム及び方法を提供する。
【解決手段】 船舶自動識別システムAISの規格の装置からTDMA方式等により無線送信されるMMSI番号と、船舶の現在位置、現在の移動方向や速度を受信するAIS受信装置2と、MMSI番号と船舶のマスト高さ関連値を対応づけて格納し検索可能な船舶マスト高さデータベース装置3と、航空機進出入路付近の海面の高さを出力する海面高さ出力装置4と、受信したMMSI番号から船舶マスト高さデータベース装置3により検索したマスト高さ関連値と、海面高さから、当該船舶のマスト頂点の位置を演算し、船舶の現在位置と移動方向及び速度から当該船舶の将来位置を予測演算し、航空機進出入路下方限界面にマスト頂点が接近するか否かを判別するコントローラ1を備える。
(もっと読む)
群走行支援装置
【課題】車両をそれぞれ適切に群に所属させることが可能な群走行支援装置を提供すること。
【解決手段】車群情報を受信する受信部11と、自車両の自車情報を検出する自車情報検出部13と、受信部11で受信した車群情報および自車情報検出部13で検出した自車情報に基づいて自車両に適した車群を選択する車群選択部173と、車群選択部173で選択した車群に属することを示す情報を生成する情報生成部172と、情報生成部172で生成した車群情報を送信する送信部12とを備えることにより、自車両に適した車群を容易に車群選択部173で選択し、選択された車群の情報を情報生成部172で生成し、送信部12を通して送信することができ、これらの情報を利用して群走行を容易に支援することが可能である。
(もっと読む)
車両周辺監視装置
【課題】車両の後方を撮影するための撮影装置が撮影した画像に基づいて、車両の側方における他の車両の存在を推測することによって、少数の撮影装置によって車両周辺の情報を的確に把握することができ、運転者が不安を感じることなく、容易に、かつ、安全に車両の運転を行うことができるようにする。
【解決手段】車両の後方を撮影する後方撮影装置と、前記車両の側方についての案内を行う案内装置とを有し、前記後方撮影装置の撮影した画像に基づいて前記車両の側方における他の車両の存在を推測し、前記案内装置に案内を行わせる。
(もっと読む)
車載装置
【課題】 グループを構成する各車両が、煩雑な作業を必要とすることなく、かつ確実に目的地へ到達することを支援する車載装置を提供すること。
【解決手段】 本発明の車載装置によれば、自車の燃料残量が、当初予定の目的地へ到達するには不十分な量であった場合に、グループ内の他車にヘルプ情報を送信する。ヘルプ情報を送信した結果として、他車による補助を受ける地点であるヘルプ地点の位置を含むレスキュー情報を該他車から受信し、そのヘルプ地点までの経路が設定されて、自車が案内される。よって、自車の燃料残量が当初予定の目的地に到達し得ない量であった場合でも、自車が他車の補助を受けることによって、確実に当初予定の目的地へ到達することができる。
(もっと読む)
所与の時間における携帯電話の物理的な位置を検出する方法
加入者データベースは、ネットワークにおける全ての携帯電話に関係するRFレベル及びタイミングアドバンス情報を格納する。位置パラメータデータベースに格納される位置データは、異なる物理的な位置を、それらの位置から測定又は推測されるRFレベル/タイミングアドバンスデータに関連付ける。そのとき、加入者データベースは、所与の時間に携帯電話の位置を確立することを目的として、その位置パラメータデータベースに対するその特定の携帯電話のためのRFレベル/タイミングアドバンスデータを一致させることにより解釈される。これにより、携帯電話の位置を生成する。加入者データベースの解釈又は問い合わせは、特定の携帯電話の位置を構築する要望がある場合に起きるが、ネットワークにおける全ての携帯電話に自動化処理を適用する等してもよい。  (もっと読む)
(もっと読む)
走行支援装置および方法
【課題】 ドライブメモの登録地点を適切な位置に設定し、再度その位置を通るときに当該ドライブメモを有効に活用する。
【解決手段】 メモ作成指示がなされた際、車両の現在位置を読み込み、発話地点よりも手前の走行経路上の所定地点をドライブメモ登録地点として算出する。算出されたドライブメモ登録地点に対応付けて、発話内容をドライブメモとして記録する。車両がドライブメモ登録地点、もしくは手前の地点に到達したとき、該当するドライブメモを読み出して音声出力する。
(もっと読む)
携帯機器及びその描画処理制御方法
【課題】 機器の持ち姿勢の状態変化に応じた低消費電力化、また違和感のない最適な地図画像表示をすることによってナビゲーションを可能とすること。
【解決手段】 方位角検出部13により機器の方位を検知し、この方位に基づいて、表示部に地図画像を表示する携帯機器である。機器の表示部の表示面の傾きの程度を検出する加速度検出部11と、その検出結果によって機器の保持・運搬・利用状態を判定する推定算出部16を備えている。この推定算出部16は、検出された機器の傾きが所定時間以上、所定の角度を外れるとき、利用歩行者が地図画像を視認していない使用状態と判定し、地図画像に対して、表示演算処理の休止を行なって低消費電力化を行なうとともに、その判定直前の地図画像データを保持用メモリに書き出し、その後の視認使用状態の再開時の再表示に備えるようにする。
(もっと読む)
ナビゲーションシステム
【課題】本線に合流する加速車線に自車が進入すると、自車情報と他車情報とに基づいて選択した種類の案内を行うようにして、ユーザが安心して、かつ、安全に本線に車線変更することができるようにする。
【解決手段】地図データを格納するデータ格納部と、自車の現在位置を検出する現在位置検出部と、前記地図データ及び自車の現在位置に基づいて、現在位置から本線に合流する加速車線の終点までの距離を取得する加速車線残り距離取得部と、前記加速車線上の自車の情報、前記本線上の他車の情報、及び、前記現在位置から加速車線の終点までの距離に基づいて、自車が前記加速車線から本線に合流することを支援する合流支援案内の種類を選択する合流支援案内選択部と、該合流支援案内選択部によって選択された合流支援案内を行う案内実行部とを有する。
(もっと読む)
車両用走行制御装置、および車両用走行制御方法
【課題】 自車両前方に存在する減速地点に向けて減速処理を実行すること。
【解決手段】 現在位置特定手段104aによって地図上における自車位置が特定されると、減速地点検出部104cは特定した自車位置の前方に存在する減速が必要な減速地点を検出する減速地点検出して、自車位置と減速地点との間の距離を算出する。そして、移動距離算出部104bは地図上における自車位置を特定してからの移動距離を算出し、算出した減速地点までの距離、および移動距離に基づいて、車両制御部104fは、減速地点に向けて減速処理を実行する。
(もっと読む)
ハイブリッド車両の駆動制御方法およびハイブリッド車両
本発明は、少なくとも2つの駆動機器(11,12)を備えたハイブリッド車両の駆動制御のための方法であって、車両の駆動が作動制御部(10)の設定に従って第1の駆動機器(11)、特に内燃機関及び/又は第2の駆動機器(12)、特に電気モーターを用いて行われ、前記第2の駆動機器(12)の駆動成分は走行区間に関連する作動制御部(10)に伝達されたデータに依存して、エネルギー蓄積器(14)の充電状態(L)を考慮して制御される形式の方法に関する。本発明によれば、地理的な走行目的地の事前設定及び/又は作動ストラテジの目的パラメータの事前設定のもとで最適な作動ストラテジが求められ、複数の代替走行ルートが利用可能な場合において、前記最適な作動ストラテジを考慮して走行ルートの選択が行われる。 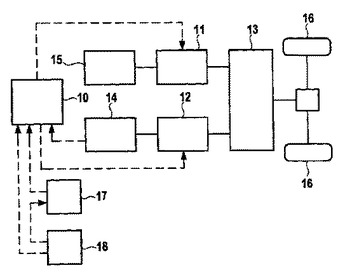 (もっと読む)
(もっと読む)
車載ナビゲーション装置
【課題】 運転者に質の高い案内情報を提供できる車載ナビゲーション装置を提供する。
【解決手段】 前方の風景画像にコンテンツ情報を重畳して表示部に表示することにより案内を行う車載ナビゲーション装置において、前方の風景をカメラで撮影した風景画像を取得する映像取得部6と、映像取得部で取得された風景画像から背景画像として好適な風景画像を選別し、該選別された風景画像と背景画像として好適であるかどうかの判断に用いた情報とを含む風景情報を出力する風景情報フィルタ部8と、風景情報フィルタ部から出力される風景情報を蓄積する風景情報蓄積部と、風景情報蓄積部に蓄積されている風景情報からコンテンツ情報を重畳させるのに最適な風景情報を選択する最適風景情報選択部10と、最適風景情報選択部で選択された風景情報に含まれる風景画像とコンテンツ情報とを合成して案内情報として表示部に表示させるコンテンツ合成部11とを備えている。
(もっと読む)
方位及び傾斜角検出装置、方位及び傾斜角検出方法、プログラム及び携帯端末装置
【課題】地磁気成分や重力成分を検出して方位及び傾斜角の情報を検出するにあたって、重力成分に含まれる誤差の影響を抑える。
【解決手段】測定データ取り込み手段702は加速度センサや磁気センサから測定データg,hを取り込む。第1の演算手段703は測定データg,hから方位角α0や仰角β0、地磁気伏角θ0を算出する。平均化手段704は地磁気伏角θ0を蓄積し平均値をとって地磁気伏角θとする。第2の演算手段705は測定データhと地磁気伏角θとから方位角αや仰角βを算出する。複数の解が存在する場合、それぞれの解を候補値(α1,β1)(α2,β2)とする。選択手段706は上記の値α0,β0を参考値とし、候補値(α1,β1)(α2,β2)から検出値(α,β)を選択する。
(もっと読む)
端末装置
【課題】 離れた場所に対応付けられたコンテンツであっても、適切なタイミングで表示することができる端末装置を提供すること。
【解決手段】 本発明は、有効となる時刻と地理的位置が関連つけられたコンテンツに対し、現在位置からコンテンツに記載された位置までの移動所要時間を計算し、コンテンツが有効となる時刻よりも移動所要時間分前もって利用者に表示するようにした。これにより、利用者は表示されたコンテンツを参照してから移動所要時間かけてコンテンツに記載された位置に移動し、コンテンツに記載された時刻に行われるイベントを体験することができる。
(もっと読む)
車載通信装置
【課題】 車両の走行に伴い不特定の路側無線通信機との間で無線通信可能な車載通信装置を提供する。
【解決手段】 車両のエンジンが始動されると、車両が現時点でどの都道府県にいるのかを判断し(S101,S102)、その都道府県に存在するすべてのアクセスポイントについての情報の送信を要求するための無線LANエリア接続情報要求を、携帯電話網を介してインターネット上の接続情報提供サーバへ送信する(S103)。そして、接続情報提供サーバからの無線LANエリア接続情報が正常に受信されると(S104:YES)、その情報に基づき接続情報データベースを更新する(S105)。その後、車両がアクセスポイントの通信エリア内に進入したと判定すると(S106:YES)、そのアクセスポイントとの間で無線LANによる無線通信を行う(S107)。
(もっと読む)
ナビゲーション装置及び情報提供方法
【課題】地点検索の際にユーザから入力される入力情報で地点を一意に特定できない場合であっても、入力情報に対応した領域の中から所望の地点をユーザが効率良く探せるようにして、利便性の向上を図る。
【解決手段】自車の乗員が入力した住所や電話番号などの入力情報に基づいて目的地を設定する際に、乗員からの入力情報が地点を表す情報か領域を表す情報かを判定し、領域を表す一部入力の情報であった場合には、当該領域の地図上の位置を特定して、例えば当該領域内の代表地点を目的地として設定する。そして、誘導案内中に自車が当該領域内に到達したときに、当該領域を他の領域とは異なる表示形態とする地図画像を表示して、自車の乗員がこの地図画像を参照することで、本来の目的地を探す範囲を的確に把握しながら当該目的地を効率良く探すことができるようにする。
(もっと読む)
ナビゲーション装置
【課題】より高い精度で施設の実際の出口を通る経路が探索できるナビゲーション装置を提供する。
【解決手段】現在地が地図データに施設データが含まれている施設内である場合には、その施設の施設内通路データがあるか否かを判断し(S30)、ある場合には施設内通路データのリンクを辿って施設出口を通る経路を探索し(S40)、ない場合には施設出口が学習されているかどうかをさらに判断する(S50)。学習されていない場合には、その施設が目的地として設定された場合に経路案内を終了する座標である案内座標を施設出口の座標に決定し(S60)、学習されている場合には、学習されている座標を施設出口の座標に決定する(S70)。そして、決定した施設出口の座標を出発地の座標として経路を探索する(S80)。このように、施設内通路データがない場合でも施設出口を決定することにより、より高い精度で施設の実際の出口を通る経路が探索できる。
(もっと読む)
安全運転支援装置
【課題】 自車両の進行方向の信号機の赤信号を自動的に検出して停止などに関する制御を行うことができるようにする。
【解決手段】 安全運転支援装置1は、処理装置3と、車両に設けられ進行方向を撮像して撮像画像を出力する前方監視カメラ4とを備えている。前記処理装置3は、前方監視カメラ4による撮像画像から赤色発光部を抽出して信号機の赤色信号を検出する赤信号検出部3aと、前記赤信号が検出されたときに当該信号機が自車両の進路上に存在する信号機であるか否かを判定する進路上信号機判定部3bと、この進路上信号機判定部3bにより自車両の進路上に存在する信号機であることが判定されたときに、車両停止などに関する対応制御を行う対応制御部3dとを備えている。
(もっと読む)
車両乗上制御システム及び車両乗上制御方法
【課題】車輪が段差部に乗り上げた際に確実に突上げ感を小さくすることができるようにする。
【解決手段】道路における段差部を認識する段差部認識処理手段と、車両の予想走行軌跡を算出する予想走行軌跡算出処理手段と、予想走行軌跡に基づいて車輪の段差部への乗上げが予測されるかどうかを判断する乗上判定処理手段と、車輪の段差部への乗上げが予測される場合に、車両支持機構の動作を制御する車両支持機構制御処理手段とを有する。予想走行軌跡に基づいて車輪の段差部への乗上げが予測されるかどうかが判断され、乗上げが予測される場合に、車両支持機構の動作が制御されるので、車輪が段差部に乗り上げた際に確実に突上げ感を小さくすることができる。
(もっと読む)
6,901 - 6,920 / 8,868
[ Back to top ]