
Fターム[5H180FF07]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 位置誤差の補正、他の位置情報の参照 (1,384)
Fターム[5H180FF07]に分類される特許
1 - 20 / 1,384
車両用運転支援装置
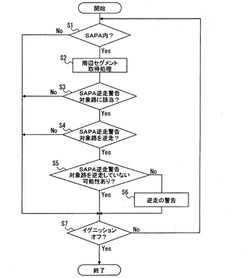
【課題】駐車区域において、進入路および退出路のうちの少なくともいずれかを走行している場合に限って逆走の警告を行うことを、より容易に可能にする車両用運転支援装置を提供する。
【解決手段】マップマッチング処理でマッチングした場所が、SAPA内の道路に該当していた場合に、位置検出器11で検出した自車両の現在位置をもとに、自車両が走行中の可能性があるSAPAセグメントを取得する。そして、当該SAPAセグメントのネットワークを前後に辿り、探索距離内に本線セグメントが存在するか否かを判定し、探索距離内に本線セグメントが存在すると判定したこと、および位置検出器11で検出した自車両の進行方向に基づいて、自車両が逆走状態であることを判断し、逆走の警告を行う。
(もっと読む)
リンク列変換方法、道路情報提供装置および道路情報提供システム

【課題】異なる地図データを利用する端末装置に交通情報や経路情報などの道路情報を提供する道路情報提供装置において、提供された道路情報を端末装置の地図上に正しく再現するために、端末装置において道路区間を特定する際のリンク変換処理負荷を軽減する。
【解決手段】道路情報装置において、地点座標列で表された道路リンク列を、指定された地図データの道路リンク列に対応する処理を実行する。これにより対応付けられなかった地点座標列を記録し、記録された地点座標列を組み合わせて新たな地点座標列を作る。この新たな地点座標列で前記地図データの道路リンク列に対応付ける処理を繰り返した結果、道路リンク変換手段として、デコードテーブル902を生成する。道路情報提供装置は、デコードテーブル902を用いた道路リンク変換により端末地図データへ対応付けた道路情報を、端末装置に配信する。
(もっと読む)
運転状態評価装置および運転状態評価システム
【課題】判定した道路種別に応じて運転診断に用いるための閾値を設定する場合において、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことを可能にする。
【解決手段】位置検出器11で検出した自車両の現在位置と記憶媒体17に記憶されている地図データとをもとに、自車両の走行中の道路を特定し、当該道路が高速道路と一般道路とのうちのいずれであるのかを逐次判定する位置情報依存トリガ生成部61cと、ETCゲートを自車両が通過したことを検出した場合に、自車両の走行中の道路が高速道路であると判定するETC情報依存トリガ生成部61aと、位置情報依存トリガ生成部61cでの判定結果とETC情報依存トリガ生成部61aでの判定結果とをもとに、自車両の走行中の道路が高速道路であるか一般道路であるかを決定する道路種別決定部62と、を備える。
(もっと読む)
行動予測装置、方法およびプログラム
【課題】目的地までの経路、および経由地点での時刻を推定する。
【解決手段】第1時刻と第1位置と第1速度と第1重みスコアとを含むパーティクルを複数個設定し、開始時刻での全ての重みスコアをゼロに設定し全ての位置、速度、および時刻をそれぞれ開始位置、開始位置での速度、および開始時刻に設定する手段103と、パーティクルごとに、パーティクルの現在位置および現在速度に基づいて未来の第2時刻での第2位置を計算し、パーティクルの現在速度を平均とする分布関数に基づいて第2時刻での第2速度を計算し、第2時刻での複数のパーティクルのうちユーザに関する過去の所在時刻と所在位置と所在速度とを含む過去の位置情報履歴により近い値を有するパーティクルほどより高い値を有する第2重みスコアを計算する手段103と、複数のパーティクルの分布密度が最も高い場所を第2時刻でのユーザの位置推測結果として出力する手段103と、を具備する。
(もっと読む)
位置推定装置および位置推定方法
【課題】走行中の車両は、その路面状態や外気温や各部品の経年数、運転するドライバーの特性といった、前記のような誤差などの各種モデルを切り替えるための閾値の決定を事前に行うことが難しいような場合、事前に決められた不変の値では、モデル化誤差が大きくなり、自車位置の算出精度に大きな悪影響を与えかねない。
【解決手段】自車位置の推定精度を高精度に保つために、複数のモデルを予め用意しておき、測位に使用するモデルを切り替えるための閾値を、自車の状態、特に自車位置を算出する際に用いるために推定されるパラメータや学習されるパラメータおよび変数や係数を用いて算出し、算出された閾値に基づいて測位に使用するモデルを決定する自車位置推定装置。
(もっと読む)
動態管理システムおよび動態管理方法
【課題】GPS信号が受信できない場合や、無線通信が行えない場合でも、車載端末の位置および到着予想時間を表示できる動態管理システムを提供する。
【解決手段】車載端末では、ジャイロ機能と車速パルスから算出する位置情報をGPSからの位置情報と比較し、キャリブレーションを行う。移動距離のズレの傾向を蓄積し補正値を作成し、GPS信号が受信できない時のジャイロ機能と車速パルスから算出する位置情報に補正値を加算する。動態管理サーバは、車載端末の位置情報に対するマップマッチングを行い、交通情報を基に車両の移動範囲を予測する。車載端末からの位置情報がGPS以外のデータが続いた場合、通過予定のPOI情報を車載端末へ送信する。車載端末の表示部に表示されたPOI情報に対応する施設を通過したらボタンを運転者に押させることで、動態管理サーバは車載端末の位置情報を取得し、予想到着時刻と誤差レベルを決定する。
(もっと読む)
ITSシミュレーションシステム
【課題】GPS測位誤差を考慮したITSシミュレーションを行う。
【解決手段】本ITSシミュレーションシステムでは、交通流シミュレータによって求められる車両位置においてGPS装置によって得られる位置情報を模擬する位置情報シミュレータを有し、この誤差を含んだ位置情報を入力としてITSアプリケーションの動作を模擬する。GPS装置によって得られる位置情報は、車両の位置にGPS測位誤差を付加したものとして求める。GPS測位誤差は、ランダムな誤差、実測値に基づいた誤差、周辺の建物の状況を考慮した誤差、または、捕捉可能なGPS衛星数を考慮した誤差とすることが考えられる。
(もっと読む)
地図更新データ供給装置及び地図更新データ供給プログラム
【課題】道路ネットワークの保障を行うと共に最新の地図更新データのデータ量を低減して供給する地図更新データ供給装置を提供する。
【解決手段】更新要求に基づき、要求更新区画23及び最新バージョンまでの差分更新用の更新データファイルMaを抽出する要求更新データ抽出手段10と、隣接する区画のネットワーク保証を行う保障更新区画24及び更新保障バージョンまでの更新データファイルMaを抽出する保障更新データ抽出手段11と、抽出した更新データファイルMaを1つの差分更新ファイルに統合した統合データファイルを生成する統合データ生成手段12とを備え、統合データファイルをナビゲーション装置2に供給する地図更新データ供給装置1。
(もっと読む)
相対位置算出装置
【課題】自車両の他車両に対する相対位置を高精度に算出する。
【解決手段】相対位置算出装置100は、自車両の測位位置を取得する測位位置取得手段110と、他車両が取得する他車両の測位位置を他車両から受信する他車両位置受信手段122と、他車両が他車両の測位位置を取得するために利用する測位衛星を示す他車両測位利用衛星情報を他車両から受信する他車両衛星情報受信手段123と、測位位置取得手段が自車両の測位位置を取得するために利用する自車両測位利用衛星と他車両測位利用衛星とが互いに異なる場合には、測位利用衛星を一致するように変更する測位利用衛星変更手段124と、変更された自車両測位利用衛星を利用して測位位置取得手段によって取得された自車両の測位位置と他車両位置受信手段によって受信された他車両の測位位置とに基づいて、自車両の他車両に対する相対位置を算出する相対位置算出手段125とを備える。
(もっと読む)
走行リンク確定装置及びリンク旅行時間算出装置
【課題】確定リンクが連続しない不連続区間が生じたときでも、不連続区間を精度良く補間する。
【解決手段】リンクマッチ処理部31は、リンク単位で位置座標が定義されている地図データと、異なる時刻における移動体位置座標を含む移動体位置データとを比較して、各移動体位置座標に対する一または複数の候補リンクを抽出する。走行リンク確定部33は、一または複数の候補リンクの中から、一のリンクを確定リンクとして抽出する。補間処理部35は、深度がN(Nは3以上の自然数)以下で不連続区間を結ぶ補間経路が唯一存在し、かつ、その唯一の補間経路の深度がN−2以下であれば、その唯一の補間経路を確定リンクとして不連続区間を補間する。
(もっと読む)
走行リンク確定装置及びリンク旅行時間算出装置
【課題】時間的に遡ることなく、時系列で走行リンクを確定する。
【解決手段】リンクマッチ処理部31は、リンク単位で位置座標が定義されている地図データと、異なる時刻における移動体位置座標を含む移動体位置データとを比較して、各移動体位置座標に対する一または複数の候補リンクを抽出する。走行リンク確定部33は、第1の移動体位置座標に対して一のリンクが抽出されたとき、抽出されたリンクを第1の移動体位置座標の確定リンクとして抽出する。また、走行リンク確定部33は、第1の移動体位置座標に対して複数のリンクが抽出されたとき、抽出された複数のリンクのうち、第1の移動体位置座標より上流の第2の移動体位置座標に応じて定まる一のリンクとつながっているリンクを、第1の移動体位置座標の確定リンクとして抽出する。
(もっと読む)
経路探索システム、経路探索サーバ、および、経路探索方法
【課題】サーバ側で経路を閲覧可能にするか、または、保存するかを、端末装置から送信された端末装置の現在位置情報に基づく経路探索結果、または、外部システムから送信された端末装置の現在位置情報に基づく経路探索結果で振り分けることができる経路探索システム、端末装置、経路探索サーバ、および、経路探索方法を提供することを課題とする。
【解決手段】本発明は、経路探索サーバにて、端末装置から送信される経路探索条件を受信し、端末装置の現在位置を示す現在位置情報を受信し、経路探索条件と現在位置情報とに基づき案内経路を探索し、案内経路データを生成し、現在位置情報が端末装置から受信されたか否かを判定し、端末装置の経路探索の履歴情報として判定結果と案内経路データとを対応付けて格納し、履歴情報に含まれる判定結果に基づいて、案内経路データを端末装置に対して閲覧可能とする。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法
【課題】複数の測位手段がある場所において、所望の測位手段をユーザーの望むタイミングで選択可能に表示することで、測位手段を迅速かつ適切に切り替えることを可能にするナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法を提供することを課題とする。
【解決手段】本発明は、ナビゲーションサーバにおいて、地図データ中の測位範囲情報で示す範囲において測位手段が選択可能であることを示す切替可能測位手段情報を生成し、地図データおよび切替可能測位手段情報を端末装置に送信し、端末装置において、受信した地図データおよび切替可能測位手段情報を出力し、出力された切替可能測位手段情報を端末装置の利用者が選択した場合に、当該選択された切替可能測位手段情報に対応する測位範囲情報で示す範囲内において、対応する測位手段に切り替える。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法
【課題】複数の測位手段のうち最適な測位手段の選択を容易にし、測位情報を迅速に反映させることを可能にする、ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法を提供することを課題とする。
【解決手段】本発明は、ナビゲーションサーバにおいて、地図データ中の測位範囲情報で示す範囲において端末装置が適切な測位手段を選択制御するための測位制御パラメータを生成し、地図データ、測位制御パラメータ、および、測位範囲情報を端末装置に送信し、端末装置において、受信した地図データを出力し、受信した測位制御パラメータに対応する測位範囲情報で示す範囲内において、測位制御パラメータに基づいて測位手段を切り替える。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】検出された歩数に歩幅データを掛け合わせることで自律航法機能における移動量の計測を行うとともに、任意の移動経路を移動しながらGPSによる測位を間欠的に行って、上記の歩幅データを補正することのできる測位装置、測位方法、およびプログラムを提供する。
【解決手段】自律航法機能の測位が行われる移動経路(T1)の後端地点でGPSによる測位を行い、この後端地点におけるGPSによる測位結果(B)と自律航法機能による測位結果(B1)との差異量を表わすベクトル(Vb)に基づき、自律航法機能により求められた移動経路(T1)の情報を補正し、さらに、自律航法機能により計測された移動経路(T1)の総移動量と、補正された移動経路(T2)の経路長との比較に基づいて、自律航法機能の演算処理で使用する歩幅データの補正を行う。
(もっと読む)
車車間通信装置
【課題】車車間通信装置において、自車両の現在位置を高精度に推定する。
【解決手段】車車間通信装置は、自車両(10)の測位位置を取得する測位位置取得手段(110)と、地図データに基づいて測位位置に対してマップマッチング処理を行うことにより、測位位置を補正して自車両の現在位置を推定する現在位置推定手段(121)と、現在位置の第1の信頼度を決定する信頼度決定手段(122)と、自車両と他車両(20a、20b)との間で情報の送受信を行う通信手段(130)と、複数の他車両における、それぞれの位置精度から求まる第2の信頼度が自車両の第1の信頼度よりも高い場合には、複数の他車両の各々の測位位置と現在位置との差分を複数の他車両の各々の第1の信頼度で重み付けして加算することにより補正量を算出し、該補正量及び自車両の測位位置に基づいて自車両の現在位置を変更する現在位置変更手段(124)とを備える。
(もっと読む)
走行支援で利用される情報の信頼度特定装置、方法およびプログラム
【課題】多様な走行支援を行う際に利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択する技術の提供。
【解決手段】プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録し、実行するプログラムを実行対象プログラムとして特定し、前記実行対象プログラムに対応する要素を前記複数の要素から選択し、選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法
【課題】利用者による地図上での修正位置の探索時間を省くことができ、修正位置の決定のための操作性を改善することができるナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法を提供することを課題とする。
【解決手段】本発明は、位置取得部にて受信した位置情報信号に基づいて、現在位置情報を取得し、現在位置情報の測位誤差範囲を示す測位誤差範囲情報を取得し、地図データから、現在位置情報に基づく現在位置を中心とした、測定誤差範囲情報の測定誤差範囲内のリンクを検索し、検索したリンクを現在位置修正候補として算出し、現在位置修正候補に入力部に対応した選択用記号を付与して、当該現在位置修正候補を表示した表示画面を表示部に表示させ、選択用記号が入力部を介して選択された場合に、当該選択用記号に対応する現在位置修正候補に基づいて現在位置情報を修正する。
(もっと読む)
交通情報案内装置及び交通情報案内プログラム
【課題】提供される交通情報に含まれる対象交差点の位置が汎用的な座標データで表されている場合にも当該対象交差点の道路ネットワークデータ上での位置を特定可能であって、更に、対象交差点が複数ノード交差点である場合にも、適切に対象交差点ノードを決定して交通情報案内を行うことができるような交通情報案内装置等を提供する。
【解決手段】交通情報に含まれる対象交差点の座標から所定距離内に位置する一又は二以上のノードを候補ノードNBとして抽出する手段と、一又は二以上の候補ノードNBの中から一つの対象交差点ノードNAを決定する手段とを備え、一つの交差点に対してノードが複数設定された複数ノード交差点に関し、一つの複数ノード交差点に対応する複数の候補ノードNBが抽出された場合には、自車両3が走行中のリンクK3から道なりに進行した場合に最初に到達する候補ノードNBを対象交差点ノードNAに決定する。
(もっと読む)
運転支援装置
【課題】本発明は、路側装置から受信した支援対象地点までの支援情報を利用して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】支援情報に基づいて支援対象地点における運転支援を行う運転支援装置1であって、支援情報(現在位置情報、支援対象地点までの道路線形情報、支援対象地点の位置情報)を取得する支援情報取得手段10,21と、自車の現在位置を検出する現在位置検出手段11と、支援対象地点を含む地図情報を記憶する記憶手段11aと、現在位置情報と支援対象地点までの道路線形情報及び地図情報に基づいて特定される第1の支援対象候補地点と、検出された現在位置と支援対象地点までの道路線形情報及び地図情報に基づいて特定される第2の支援対象候補地点と、支援対象地点の位置情報とを比較する比較手段22と、その比較結果に基づいて運転支援を行う運転支援手段23,24とを備えることを特徴とする。
(もっと読む)
1 - 20 / 1,384
[ Back to top ]