
Fターム[5H180FF27]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 位置・経路の誘導・案内指示装置 (32,912) | 車載のもの (8,483)
Fターム[5H180FF27]に分類される特許
141 - 160 / 8,483
死角領域推定装置及びプログラム
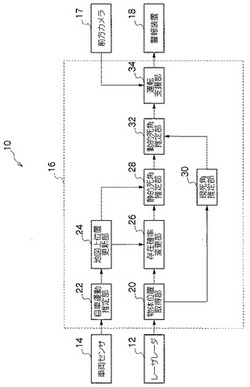
【課題】、簡易な処理で、動的死角領域を推定することができるようにする。
【解決手段】存在確率変更部26によって、地図情報において、レーザレーダ12によって検出された現在の物体の位置に対応するブロックの存在確率を増加させると共に、自車両から検出された現在の物体の位置までの直線上に存在するブロックの存在確率を減少させることにより、静止物の位置を記録した地図情報を取得する。静的死角推定部28によって、取得された地図情報に記録された静止物の位置と、自車両の現在の位置とに基づいて、静的死角領域を推定する。現死角推定部30によって、レーザレーダ12によって検出された現在の物体の位置に基づいて、現在死角領域を推定する。動的死角推定部32によって、推定された現在死角領域と、推定された静的死角領域との差分に基づいて、動的死角領域を推定する。
(もっと読む)
車両制御装置

【課題】死角から物体が出現した場合であっても適切な走行支援を行うことのできる車両制御装置を提供する。
【解決手段】物体認識部16は、物体の存在の確からしさを示す確信度を演算することによって、物体検出部3によって検出された物体の認識を行う。また、物体認識部16は、検出された物体が死角から出現した物体であると判定した場合、通常時に比して確信度を増加するように演算する。物体認識部16は、確信度が通常時に比して増加するように演算することができるため、死角から急に出現した物体に対しては、物体検出部3での検出から認識するまでの間に要する時間を短くすることができる。認識するまでの時間を短くすることによって、その後の処理を早期に行うことが可能となるため、死角から急に出現した物体に対しても十分な時間を確保して適切な走行支援を行うことができる。
(もっと読む)
交通ハザードマップ生成装置
【解決手段】交通ハザードマップ生成装置は、第1群運転者および第2群運転者の個々の頭部動きデータおよび位置データを運転データして記憶し、頭部動きデータを積分して時系列データを得る(S117)。時系列の頭部動きデータに基づいて、それぞれの運転者が首振り確認動作を実行した場所のデータを確認場所データとして記憶する(S119)。ステップS123で第1群運転者が共通して首振り確認動作をした場所の第1群運転者確認場所データを抽出し、ステップS125で第2群運転者が共通して首振り確認動作をした場所の第2群運転者確認場所データを抽出する。そして、第1群運転者確認場所データおよび第2群運転者確認場所データを比較して顕在的危険箇所および潜在的危険箇所を特定する。
【効果】顕在的危険箇所だけでなく潜在的危険箇所も特定されるので、危険認知が不十分な一般運転者にも有効な交通ハザードマップを生成することができる。
(もっと読む)
車載装置および認知支援システム
【課題】危険物体に対するドライバーの警戒感を維持しつつ、ドライバーの死角から自車両に接近する移動物体の存在をドライバーに対して確実に認識させること。
【解決手段】車両の周辺映像を車載装置が撮像した映像を取得し、自車両の走行状態を示す自車両情報に基づき、周辺映像から自車両に接近する移動物体を車載装置が検出し、表示部へ入力される複数系統の映像を車載装置が切り替え、移動物体が検出された場合に、周辺映像への切替を車載装置が指示するように構成する。
(もっと読む)
車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム
【課題】案内情報を適切に案内対象地点に重畳させて表示することが可能となるとともに運転者に案内情報を視認させ易く表示することを可能とした車両用走行案内装置、車両用走行案内方法及びコンピュータプログラムを提供する。
【解決手段】ナビゲーション装置1に係る案内情報をHUD50により表示する場合に、車両に関する車両情報と車両の周辺環境をそれぞれ取得し、取得した車両情報と車両周辺環境とに基づいて、車両に所定値以上の制動力が継続的に発生することが予測される区間を、車両姿勢が基準姿勢に対して変位している状態が継続することが予測される区間として補正対象区間に設定し、設定された補正対象区間を車両が走行する間において、案内情報を表示する表示位置を、車両の制動力の発生に基づく車両姿勢の変位を考慮して補正するように構成する。
(もっと読む)
プローブ情報収集システム、プローブ情報収集方法、及びプログラム
【課題】携帯端末装置で生成されたプローブ情報を収集するときに、自動車、人(徒歩)など特定された移動体毎、または特定された移動体のみのプローブ情報を収集できるようにする。
【解決手段】
携帯端末装置4はGPS受信機及び慣性計測装置を備えている。慣性計測装置の出力に基づいて、携帯端末装置4のユーザが自動車に乗っているのか歩いているのか、即ち移動体が自動車なのか人なのかを識別し、その識別結果をGPS受信機で生成したプローブ情報とともに、プローブ情報収集サーバ2へ送信する。プローブ情報収集サーバ2では、移動体の識別結果が自動車の場合は、プローブ情報を車両用プローブ情報データベースに記憶し、移動体の識別結果が人の場合は、歩行者用プローブ情報データベースに記憶する。
(もっと読む)
ナビゲーションシステムおよび車載装置
【課題】車載装置における記憶デバイスの記憶容量削減および有効活用を図ること。
【解決手段】メッシュ状に分割された地図データを車載装置からの要求に応じて車載装置へ送信するようにサーバ装置を構成する。また、サーバ装置に対して地図データを要求し、要求に応じてサーバ装置から受信した地図データを記憶し、記憶された地図データに対して有効期限を設定し、有効期限を超過した地図データを消去するように車載装置を構成する。
(もっと読む)
運転支援システム
【課題】運転支援の必要がない状況になった際に速やかに運転支援を終了させる。
【解決手段】ハンドル角センサ11、車速センサ12、ターンシグナルスイッチ13、ブレーキスイッチ14の情報により、運転者の意思に基づいて自車両が支援システムの当該路から外れたことを退出判断部7で認識した時に、判断部6によりカーナビ部5への表示を停止させる。
(もっと読む)
衝突防止装置、衝突防止方法、衝突防止プログラム、および衝突防止システム
【課題】通信範囲内に多数の車両が存在しても円滑な通信を行うことができる衝突防止装置、衝突防止方法、衝突防止プログラム、および衝突防止システムの提供。
【解決手段】車両が所定の範囲に進入した場合に車両の走行状況を示す走行情報を受信し、または車両が他車両と衝突の可能性がある旨の判定結果を所定の範囲に進入した他車両に送信する路側通信部と、交差点情報と、車両が交差点に進入した場合に車両同士が衝突の可能性を判定する衝突可能性判定条件とを記憶する路側記憶部と、路側通信部が車両から走行情報を受信した場合に、受信した走行情報と、道路情報と、交差点情報とに基づいて車両が進入した交差点を特定し、受信した走行情報と衝突可能性判定条件とに基づいて、特定した交差点において車両が他車両と衝突の可能性があるか否かを判定し、車両が他車両と衝突の可能性があると判定した場合にのみ判定結果を出力する衝突可能性判定部とを備える。
(もっと読む)
物体検出装置、物体検出装置を備えた車両の安全システム
【課題】上下方向の分解能が所定レベルに満たないレーダによって検出された静止物体が車両の走行にとっての障害物であるか否かを精度良く判定可能な物体検出装置を提供する。
【解決手段】レーダ部10と、レーダ部10により自車両の前方に存在する絶対速度が所定値未満の物体を静止物体として検出する静止物体検出部20と、自車両の前方に存在する絶対速度が所定値以上の物体を移動物体として検出する移動物体検出部30と、静止物体の検出位置の周囲に、その範囲に存在する移動物体は該静止物体に衝突することを回避不可能又は該静止物体に既に衝突したと推定できるように定められる所定の探索範囲を設定する設定部40と、移動物体の検出結果のうちに検出位置が前記探索範囲に入る検出結果が存在する場合、前記検出された静止物体は自車両の走行にとって障害とならない非障害物であると判定する判定部50と、を備える。
(もっと読む)
情報処理装置、入力方法、入力プログラムおよび記録媒体
【課題】移動体の移動中における操作入力を安全におこなえるようにすること。
【解決手段】情報処理装置100は移動体に搭載される。入力部101は、ユーザからの操作入力を受け付ける。取得部102は、移動体の移動状態に関する情報を継続的に取得する。判定部103は、移動状態に関する情報に基づいて、移動体が移動しているか否かを継続的に判定する。検知部104は、入力部101に対する物体の接近および接触を検知する。入力部101は、所定の操作入力を受け付けるにあたって、移動体が移動していると判定されている間は物体の接近を操作入力として受け付け、移動体が移動していないと判定されている間は物体の接触を操作入力として受け付ける。
(もっと読む)
覚醒支援装置
【課題】覚醒支援を適切なタイミングで開始することと、ユーザに与える不快感の軽減との両立を図ること。
【解決手段】眠気度合いがThd1以上かを判定する(S210)。判定された眠気度合いがThd1以上と判定すると(S210YES)、覚醒支援開始について許可または不許可を示す情報をユーザに入力させるための画面を、タッチパネル画面に表示する(S225)。許可または不許可を示す情報の何れかが運転者によって選択されたかを、タッチパネル画面に入力された情報に基づいて判定する(S235)。許可または不許可を示す情報の何れが選択されたと判定すると(S235YES)、覚醒支援開始の許可が選択されたかを判定する(S250)。覚醒支援開始の許可が選択されたと判定すると(S250YES)、覚醒支援を開始する(S295)。覚醒支援開始の不許可が選択されたと判定すると(S250NO)覚醒支援を開始しない。
(もっと読む)
事故発生予測装置、事故発生予測プログラム及び事故発生予測方法
【課題】道路形状に依らない他車の動きに起因する事故の発生を予測する。
【解決手段】自車と他車の間で事故が発生する可能性のある状態を、自車と他車の相対位置の情報、自車及び前記他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報で定義した事故定義を保持する予測状況DB18と、自車が実際に運転されている状態で、自車と他車の相対位置の情報、自車及び他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報を取得する取得部(10A,10B,11,14)と、取得部で取得された情報と、事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部16と、を備える。
(もっと読む)
情報提示装置
【課題】精度がより高く、且つ、実施がより容易であるとともに、コスト的な無駄をより抑えることを可能にしながらも、ドライバにとっての快適性をより損ないにくい情報提示装置を提供する。
【解決手段】注意喚起表示や警告表示にドライバが気づいたか否かの判定を行う行動判定部30を備え、情報提示制御部27は、行動判定部30で肯定判定を行ったことをもとに、注意喚起表示や警告表示の減衰表示への変化を表示部21に行わせ、行動判定部30は、表示部21に表示された注意喚起表示や警告表示にドライバが気づいた場合にドライバが行うスイッチ操作や運転操作によって生じる信号であるドライバ行動確認情報や車両情報をもとに上述の判定を行う。
(もっと読む)
経路作成装置
【課題】走行経路の作成時間を短縮すること。
【解決手段】経路作成装置1は、ノードを繋ぐ線分を順次接続することにより開始点から目標点までの車両の走行経路を作成する装置である。この経路作成装置1は、空間上からランダムに抽出した点を基準に新たなノードを設定する処理を、目標点から所定の範囲内にノードが設定されるまで繰り返し実行し、設定されたノードを繋ぐ線分を順次接続することにより走行経路を作成する作成部16bと、車両の状況又は該車両の周辺の状況を検出する手段(障害物検出装置11や白線検出装置12など)と、検出された状況に基づいて、目標点をランダムに抽出した点とする確率を決定する確率決定部16aと、を備えることを特徴とする。
(もっと読む)
画像判定装置、画像判定方法および画像判定プログラム
【課題】開閉する可動部に応じて方向及び位置が変わる撮像部が適切な位置および方向となっているか否かを効率的かつ正確に判定すること。
【解決手段】画像判定装置10の記憶部13が、撮像部12により可動部11の開状態で撮影された画像データに含まれる開状態の特徴をなす第1の部分画像データ13aを記憶する。また、記憶部13は、撮像部12により可動部11の閉状態で撮影された画像データに含まれる閉状態の特徴をなす第2の部分画像データ13bを記憶する。そして、判定部14が、記憶部13に記憶された第1の部分画像データ13a及び第2の部分画像データ13bを用いて、判定対象画像データが閉状態で撮影された画像データであるか否かを判定する。
(もっと読む)
運転支援装置
【課題】衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置において、ドライバに最適なタイミングで注意喚起が行なえるようにする。
【解決手段】検出部14により、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生を検出し、この検出に基づき、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生状況から学習し、実際に注意喚起のタイミングの補正が必要なときにのみ、注意喚起処理部8により、記憶部9の注意喚起のタイミングを自動的に的確に自車両1のドライバの運転行動の特性に応じた最適なタイミング補正し、次回の注意喚起のタイミングに、記憶部9の補正されたタイミングで表示部10、スピーカ11によって注意喚起を行なう。
(もっと読む)
道路交通網制御システムおよびその制御方式
【課題】 道路の交差点信号システムを制御することにより車両が途中で止まることなく走行することを可能にする。これにより車のガソリン消費を減らし、走行時間を短縮し、二酸化炭素の排出を大幅に抑制する。
【解決手段】 道路の各交差点において信号が変わる周期を一定にし、各信号機の切り替えを同期して行う。さらに隣り合う交差点の信号の切り替えを逆位相もしくは同位相にする。また、信号周期の決定に際しては周期の整数倍が1時間になるように設定する。そして、走行車両への走行速度の周知を徹底することで発明の効果を高める。
(もっと読む)
運転支援装置
【課題】 交通の流れをスムースにできる運転支援装置を提供する。
【解決手段】 運転支援装置1は、自車の走行する道路上に存在する信号機付き交差点の信号機情報を取得する信号機情報取得手段41と、自車の前方において、自車の走行する道路に進入しようとする他車を検出する他車検出手段51と、他車の走行道路への進入位置から信号機付き交差点までの距離を検出する第一距離検出手段21と、信号機情報と進入位置から信号機付き交差点までの距離とに基づいて、自車が進入位置に到達した際に自車の進入位置の通過に先駆けて他車を走行道路に進入させるか否かを判断する判断手段24と、を備える。従って、他車は、走行道路を走行する各車両が停止する際に適切な車間距離まで詰めるのを待たされることなく、適切なタイミングで走行道路に進入可能となるため、交通の流れをスムーズにできる。
(もっと読む)
車両用周辺監視装置
【課題】本発明は、運転者への不要な障害物検出通知を抑制することを課題とする。
【解決手段】車外の画像を撮像する撮像手段と、車両の運転者の視線の方向を検出する視線検出手段と、車両のハンドルの操舵角方向を検出する操舵角検出手段と、前記撮像手段によって撮像された画像に基づいて障害物を検出する障害物検出手段と、前記障害物検出手段によって、前記視線検出手段によって検出された運転者の視線の方向から外れた所定範囲内に障害物が検出され、且つ運転者の視線の方向と前記操舵角検出手段によって検出されたハンドルの操舵角方向とが一致する場合に、障害物の存在を車両の運転者に通知する通知手段と、を備えている。
(もっと読む)
141 - 160 / 8,483
[ Back to top ]